




 本文介绍如何使用STM32CubeMX配置外部中断,并在main.c中编写中断响应函数,实现按键与LED同步点亮的功能。通过消抖按键操作,当按键按下时,LED随之点亮;按键释放时,LED熄灭。
本文介绍如何使用STM32CubeMX配置外部中断,并在main.c中编写中断响应函数,实现按键与LED同步点亮的功能。通过消抖按键操作,当按键按下时,LED随之点亮;按键释放时,LED熄灭。
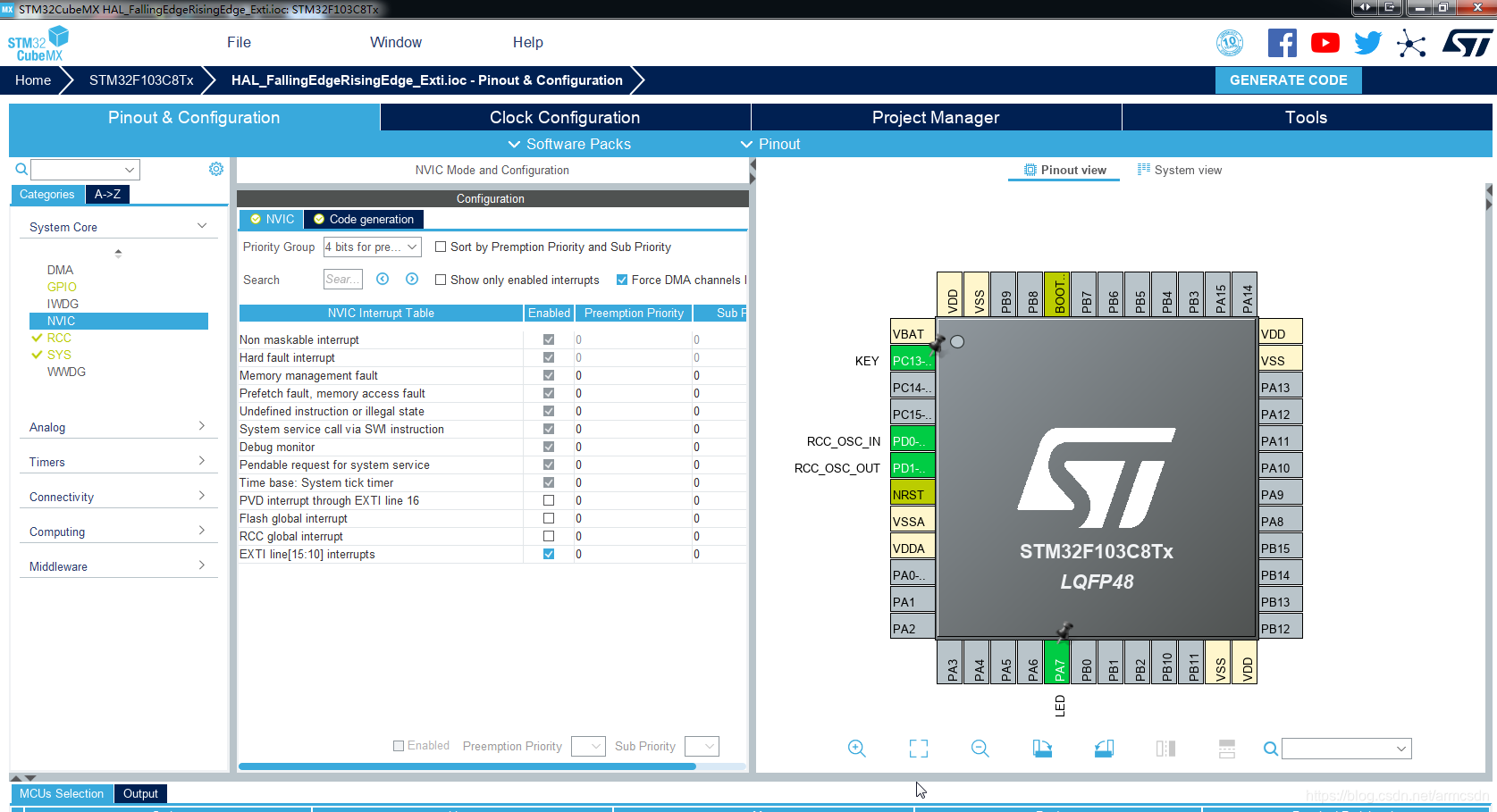
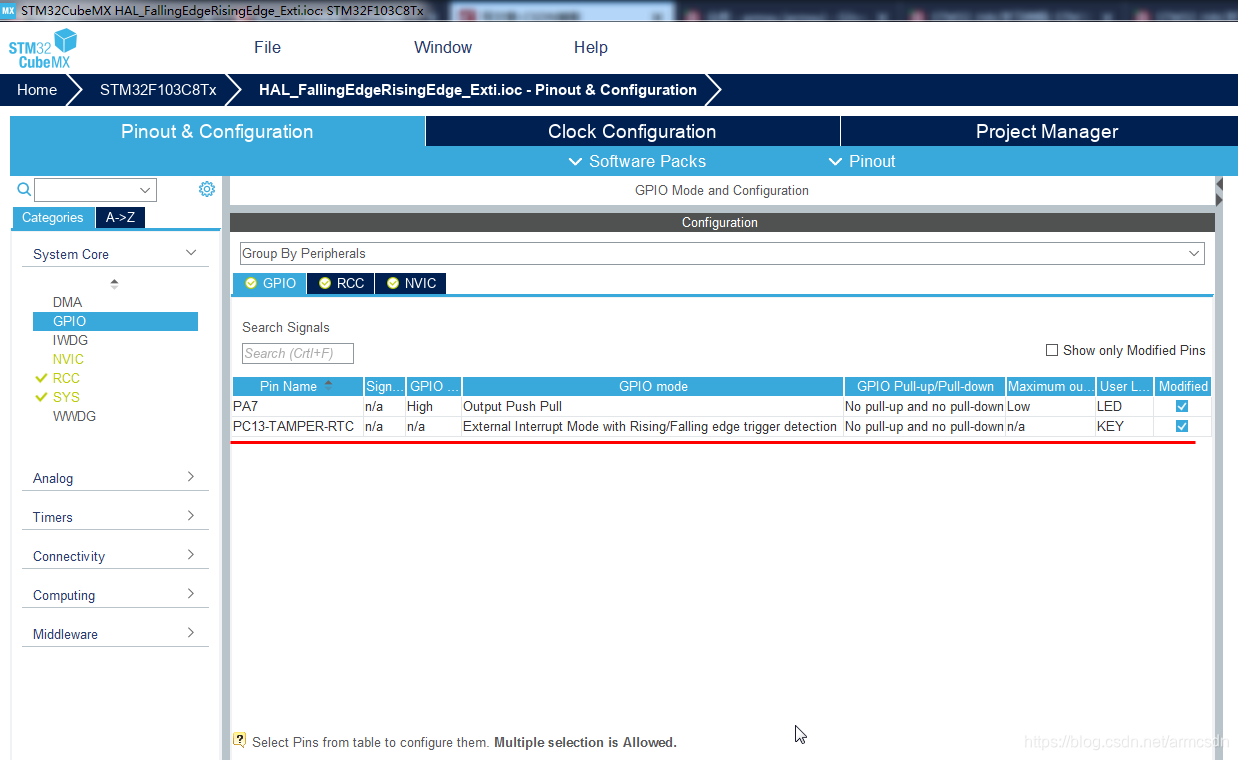
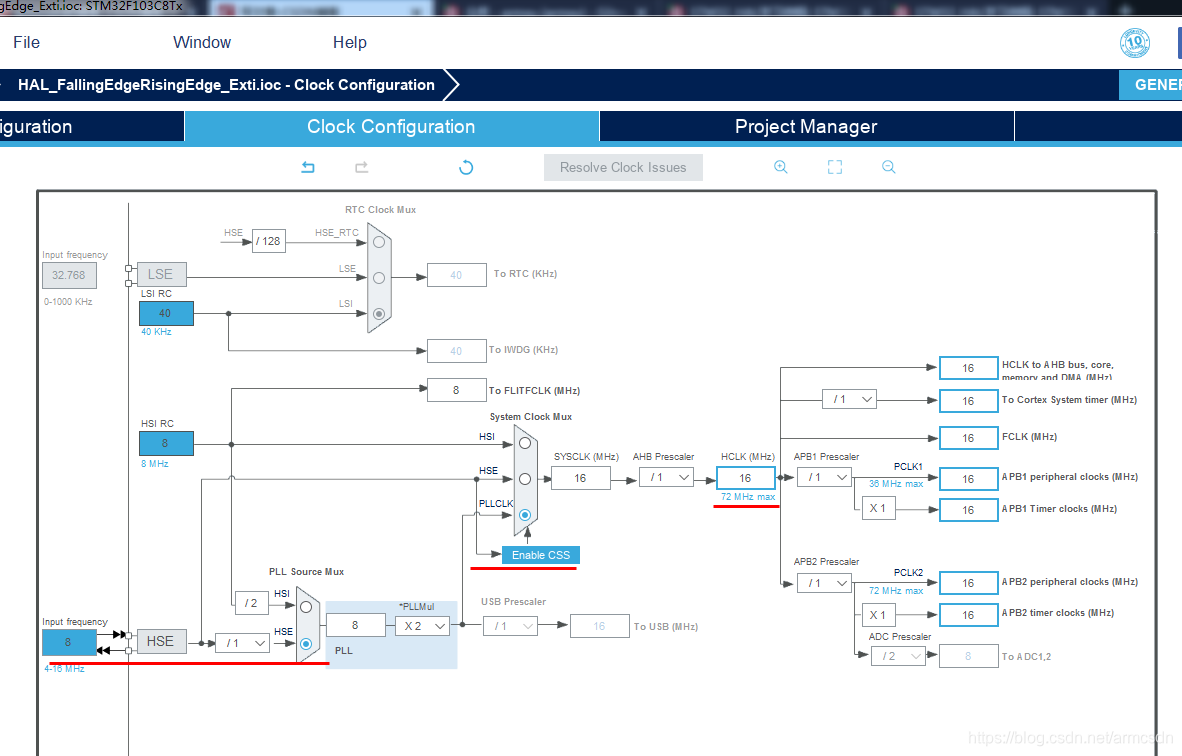
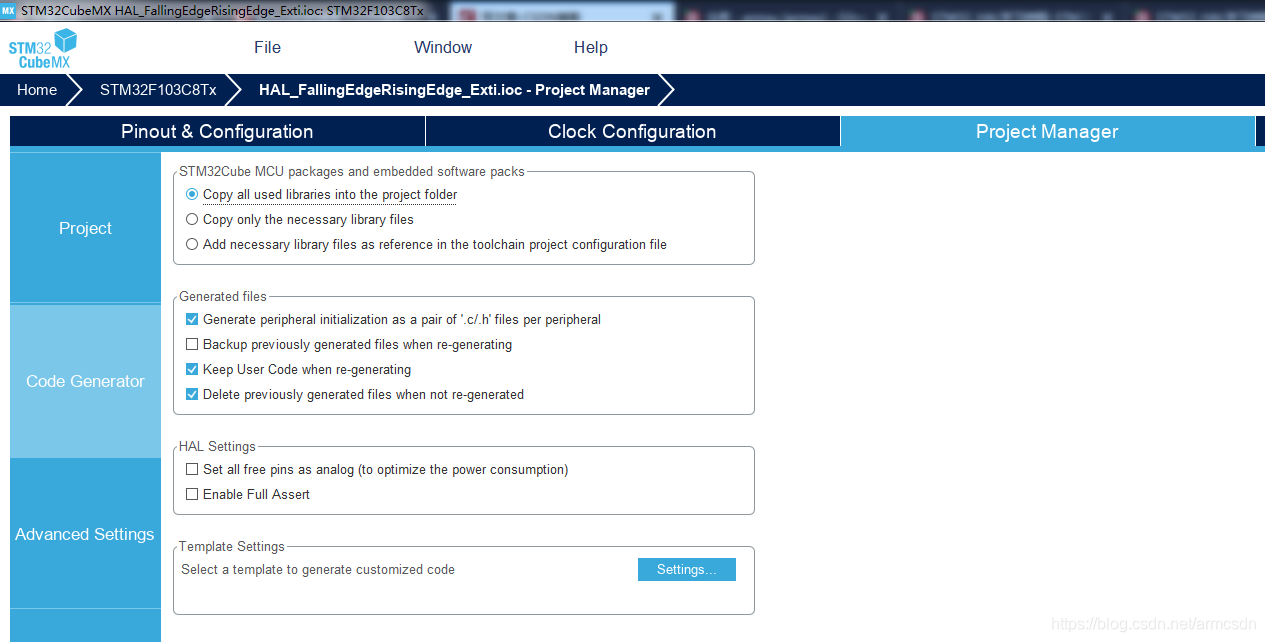
CubeMX按如下设置:
在main.c中添加中断响应函数:
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//外界消抖按键,实现按键与LED同步亮灯
if(GPIO_Pin==KEY_Pin)
{
if(HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin)){ //check pin state
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
}
if(!HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin)){
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_RESET);
}
}
}
编译下载,外部接消抖按键和LED,即可实现按键与LED同步点亮。


















 1420
1420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











