



用于神经康复的7自由度手部外骨骼评估
1 引言
中风是美国致残的首要原因,每年约有80万例[1]。尽管现有技术和治疗手段不断进步,偏瘫中风患者在6个月恢复期后仍有30–66%无法恢复手臂功能;而仅有5–20%的患者表现出偏瘫手臂的完全功能恢复[2]。影响上肢(UE)的神经功能损伤显著限制了患者的生活独立性。有力证据表明,结合运动练习并引入任务特异性训练的治疗干预可促进功能恢复[2–4]。然而,由于存在差异,能够有效促进手臂和手部功能恢复的最佳治疗干预措施仍不明确。
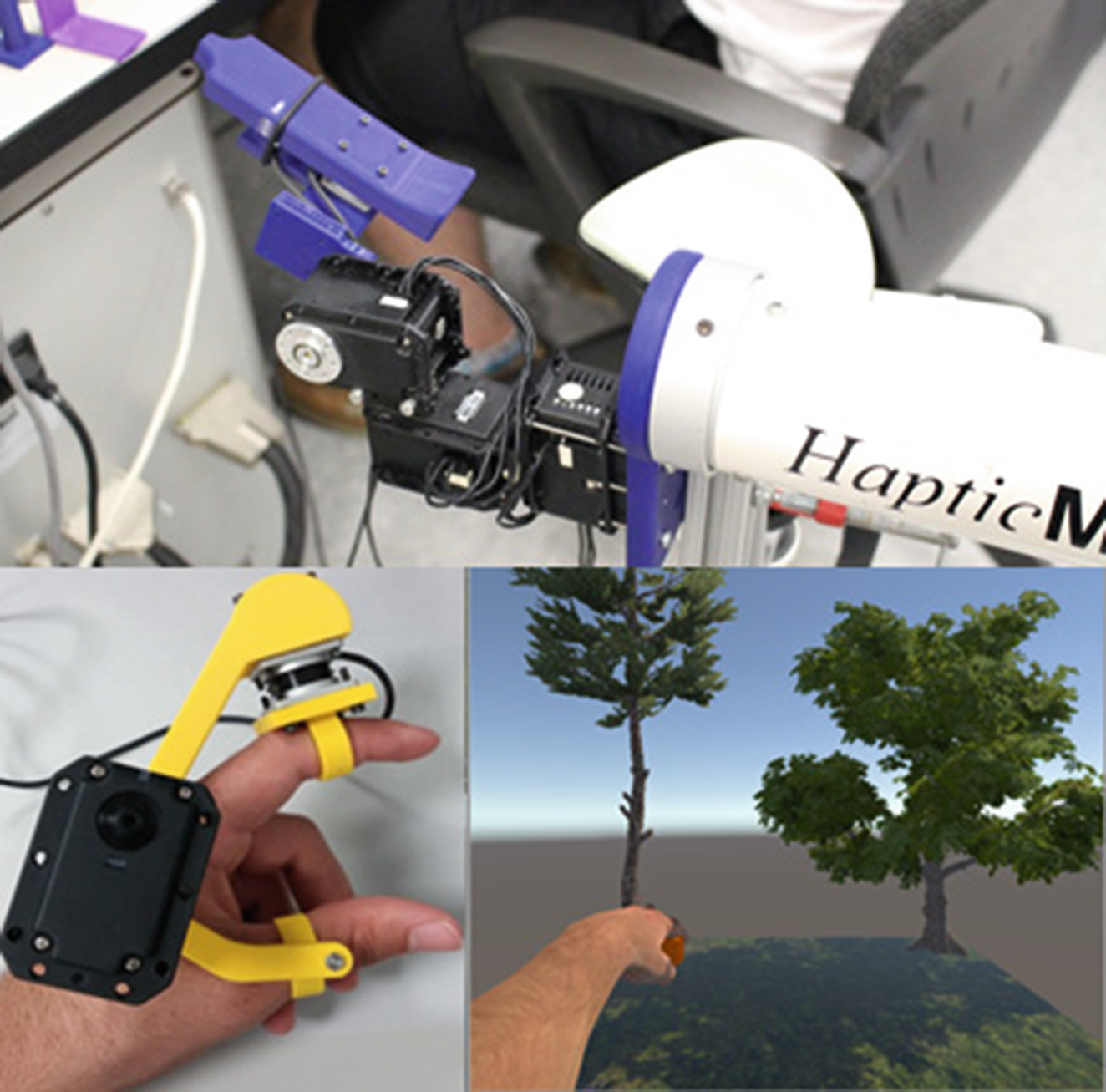
当前的康复。机器人康复可能提供一种完整的运动疗法,能够增强训练并使临床实践标准最大化。多数机器人系统是为肘部和肩部康复而设计的。然而,有必要开发专注于手部康复的上肢装置。我们建议,为了提高神经可塑性并建立适当的皮层表征,机器人辅助治疗应提供一种有效的方法来整合手臂和手部运动的协调。一个主动式4自由度手部外骨骼将与现有的3自由度触觉机器人(触觉主控器,FCS穆格)集成,以确定近端和远端训练在上肢康复中的有效性。该功能系统将允许用户在空间中移动手臂,同时获得针对手腕运动(如屈曲/伸展、外展/内收以及旋后/旋前)的机器人辅助。捏力辅助将依赖于一个主动抓握器,通过食指掌骨关节(MCP关节)的旋转以及拇指掌骨关节的旋转,实现各手指的屈曲/伸展。新泽西理工学院HandsOn(7自由度)将在虚拟环境(VE)中支持手部远端运动和上臂近端运动在三维空间中的运动。该系统在导纳控制下运行,将允许具有残余肌肉功能的患者在训练期间执行所需的动作。该训练系统提供了一致的环境,以促进带有触觉辅助的重复练习。
上肢运动在生物学上编码为手臂和手部运动的同步控制。运动控制反应利用所有自由度在任务期间执行顺序运动。使用更多自由度进行训练应能提供更自然的反应和更强的协调性。用于康复的上肢手臂运动应反映这种编码的运动,并提供粗大和精细运动控制的训练。
2 设计组件
2.1 导纳控制范式
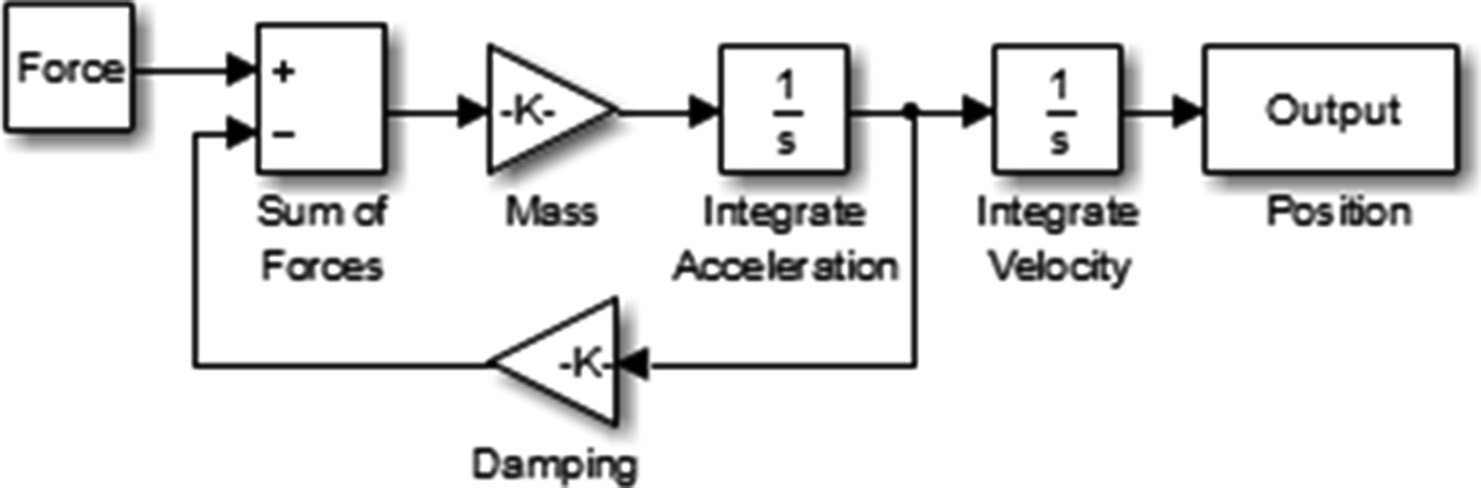
导纳控制(AC)允许用户输入力,并将该力转化为运动。在导纳控制下,用户仅感受到小虚拟质量的惯性,该惯性相比实际机器人执行器的惯性和负载能力可以非常小。这使得肌力减弱明显的个体能够利用其残余运动控制有效驱动一个功能强大的机器人。用于上肢康复的导纳控制系统相关的优点包括:力放大、反向驱动性和直观的自主控制(图[5]1)。无法调节力的用户则必须依赖预编程运动。
牛顿第二定律可扩展为包含系统阻尼变量的形式,其中:F(x) = 力 (N),M = 质量 (kg),B = 阻尼 (Ns/m),_x(t) = 速度 (m/s),€x(t) = 加速度 (m/s²)。该二阶微分方程(公式 1)是导纳控制算法的基础。
$$
\ddot{x} = \frac{F(x)}{M} - B \dot{x} \quad (1)
$$
2.2 手腕末端执行器
已设计出一种3自由度手腕外骨骼,用于模拟手腕的活动范围,并作为触觉主控器的远端附件。该装置集成了3个Dynamixel电机(机器人公司),以实现滚动、俯仰和偏航(图2顶部)。电机与3D打印结构相连,用以支撑手腕。该系统可辅助屈伸、外展/内收以及旋前/旋后运动。需要注意的是,无论力量受限与否,预期的运动都将得到辅助。
2.3 模块化夹持器
可将模块化夹持器添加到主动外骨骼上,以提供在空间中操作物体的能力,并在虚拟环境中提供触觉感知。单自由度夹持器允许拇指和食指的掌指关节旋转。食指关节处使用Dynamixel MX-28电机产生掌指关节旋转,并与拇指掌骨关节耦合以实现旋转(图2)。该运动提供指尖捏力,而指尖捏力对于日常生活中的手部功能至关重要。捏取技能受损会显著影响中风幸存者的灵巧功能,导致对日常活动的依赖性增加以及生活质量下降[6]。患者应能看见机构上的手部,特别是拇指,以促进抓握预成型、维持抓握与释放[3]。
集成外骨骼使用户能够增大活动范围,并具备操控和与物体交互的能力。
2.4 虚拟环境
可以通过虚拟方式呈现训练环境,从而创建一种系统化治疗,在此过程中可以持续监测和操控练习强度以及激励性反馈,以辅助运动学习任务。在虚拟环境中训练的受试者相较于对照组受试者表现出更快的学习速度[7]。虚拟环境能够提供更具吸引力和激励性的治疗环境,提供具有挑战性任务的真实场景,有助于患者更好地适应日常活动。Unity3D 是一种跨平台3D引擎,可用于开发用于治疗干预的强大游戏和应用程序。本研究使用 Unity3D 创建了一个虚拟环境,以开发手部外骨骼的界面。手腕和手指的轨迹被映射到手的虚拟呈现上,见图2。
3 方法
将招募无视觉或运动障碍且右手主导的健康受试者参与本研究。受试者将坐在左前臂固定于连接至Haptic Master的手臂矫形器中的位置。左手将放置在安装于Haptic Master末端执行器上的腕部外骨骼中。受试者将被随机分配到4个组:Haptic Master 对照组 (HM)、带夹持器的 Haptic Master (HMG)、带手腕装置的 Haptic Master (HMW) 和带夹持器和手腕装置的 Haptic Master (HMGW)。受试者将被要求执行拾取与放置任务,在120秒试验期间尽可能多次拾取不同厚度(0.45、0.35和0.25英寸)的虚拟立方体并将它们放置在指定目标上。每位受试者将参与6个训练阶段,每个阶段包含8次试验。受试者将针对每种立方体尺寸完成两个阶段,每次8次试验。


















 42
42

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









