 ROS初学者指南:安装与运行仿真软件包
ROS初学者指南:安装与运行仿真软件包




 本文详细介绍了在Ubuntu16.04和ROS环境下安装并运行一个第三方ROS仿真软件包的全过程,包括环境搭建、依赖安装、编译及运行,解决了常见错误并提供了实用的命令行操作技巧。
本文详细介绍了在Ubuntu16.04和ROS环境下安装并运行一个第三方ROS仿真软件包的全过程,包括环境搭建、依赖安装、编译及运行,解决了常见错误并提供了实用的命令行操作技巧。
本文记录安装一个第三方仿真软件包的实战,从下载到成功运行!
环境:ubuntu16.04 & ROS-Ubuntu2
下载源码包
在Ubuntu系统上,确保git已经安装
sudo apt-get install git
然后再创建一个名为tutorial_ws的工作空间,在它的src路径下克隆ROS-Academy-for-Beginners软件包
cd
mkdir -p tutorial_ws/src 创建catkin工作空间
cd tutorial_ws/src 进入src路径,克隆教学软件包
git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git
安装依赖
安装依赖:
cd ~/tutorial_ws
rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
过程图:
注意:以上命令非常重要,缺少依赖将导致软件包无法正常编译和运行。
在开始编译之前,需要确保Gazebo在7.0版本以上
gazebo -V
编译
接着回到catkin_ws下编译:
cd ~/tutorial_ws
catkin_make
过程图:
下面是刷新环境的两种方法:
source ~/tutorial_ws/devel/setup.bash
rospack profile
过程图:

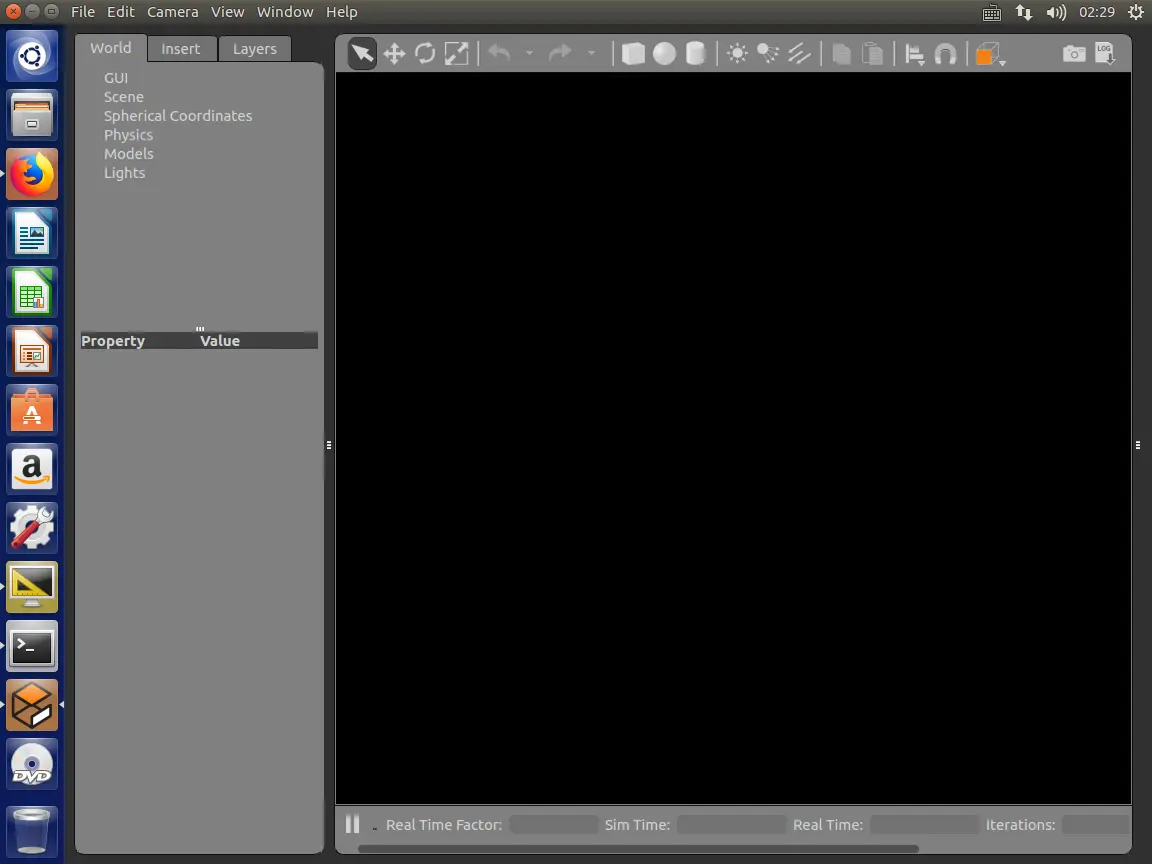
运行仿真程序
首先需要解决一个问题,不然待会儿运行时会闪退:
- 虚拟机上无法运行Gazebo的问题?
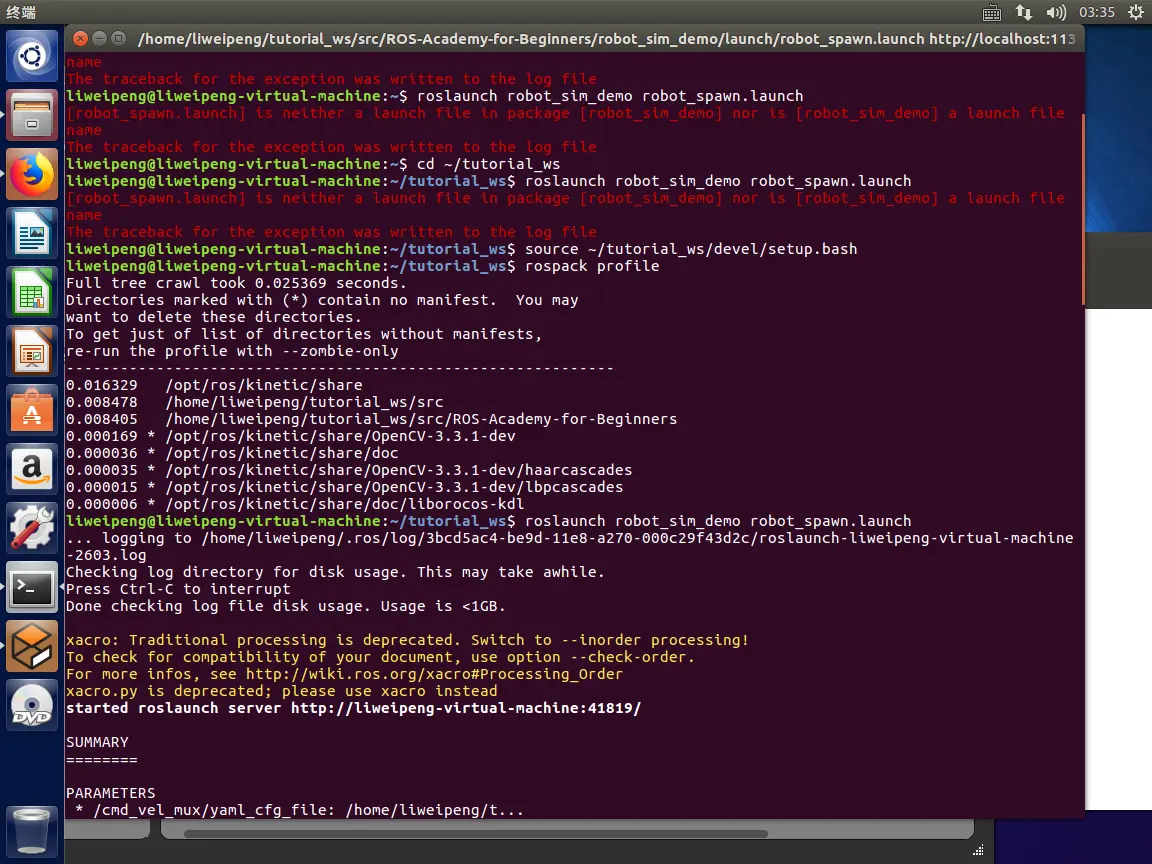
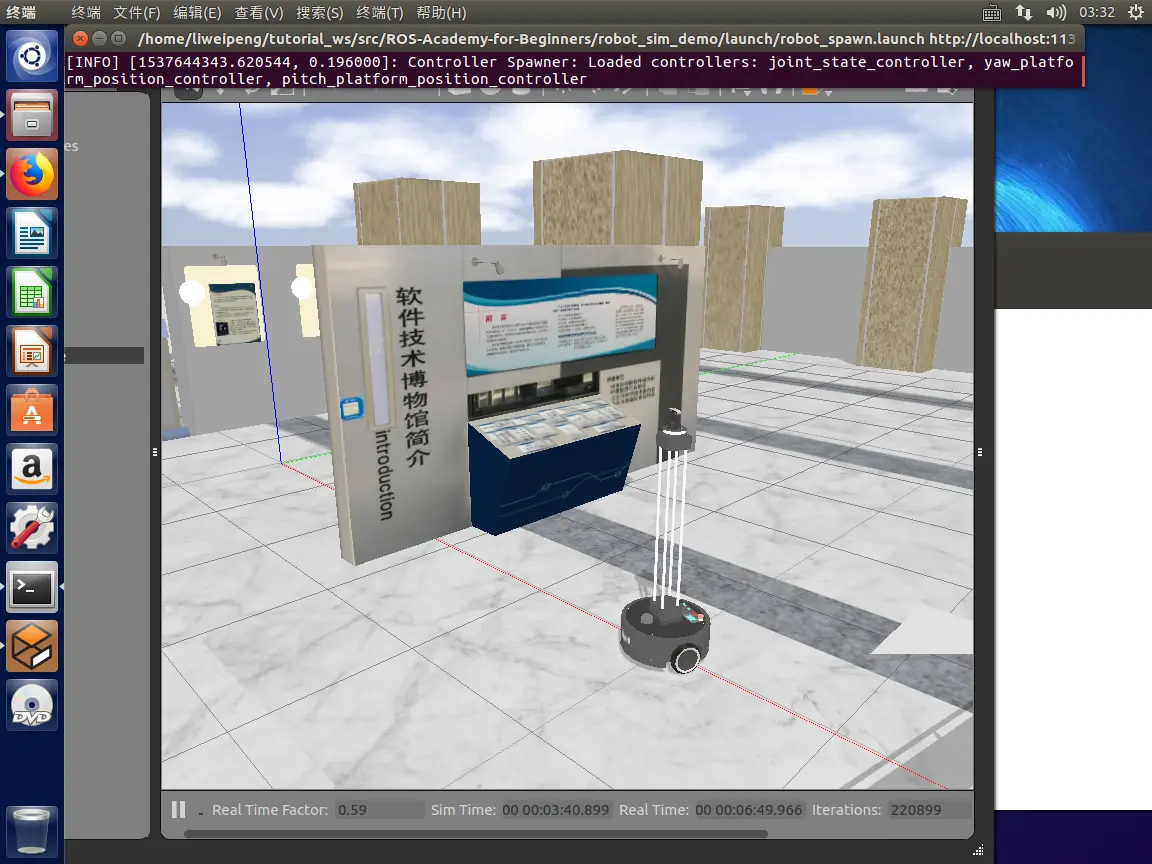
然后进入工作空间,输入下方代码即可:
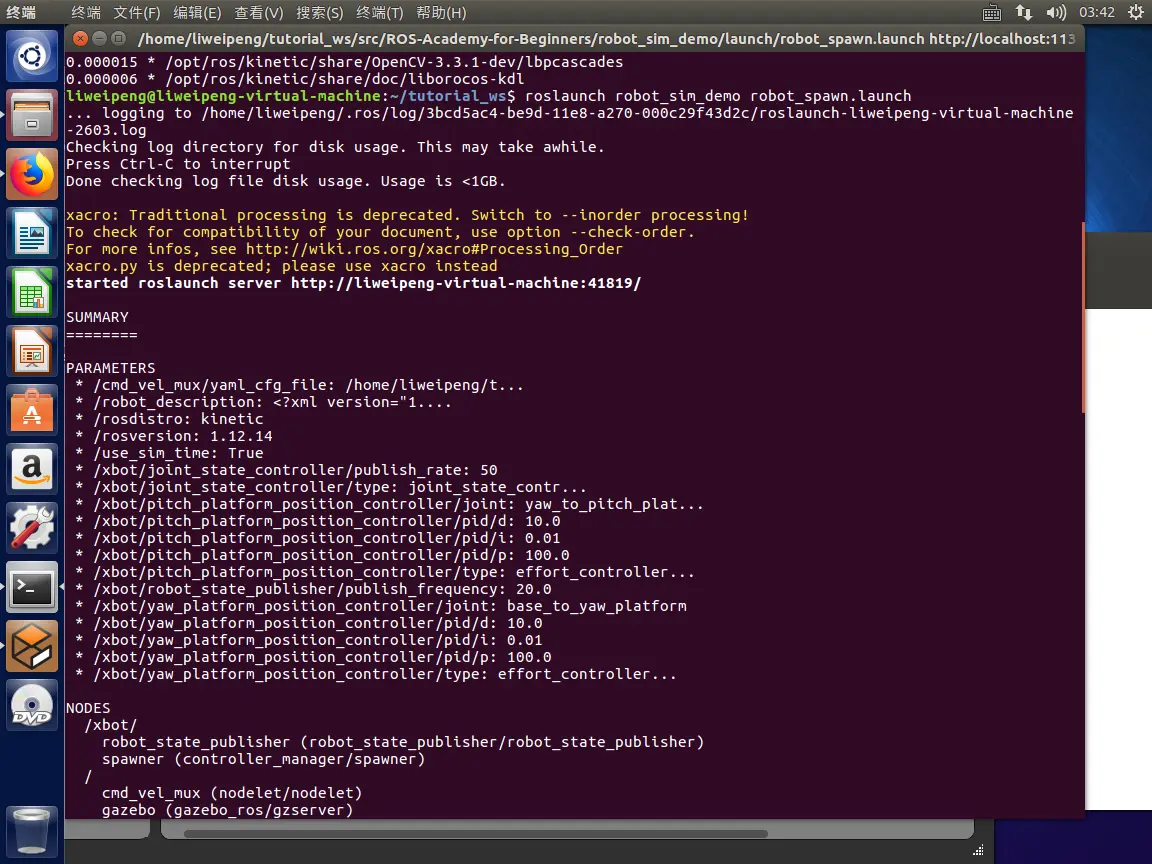
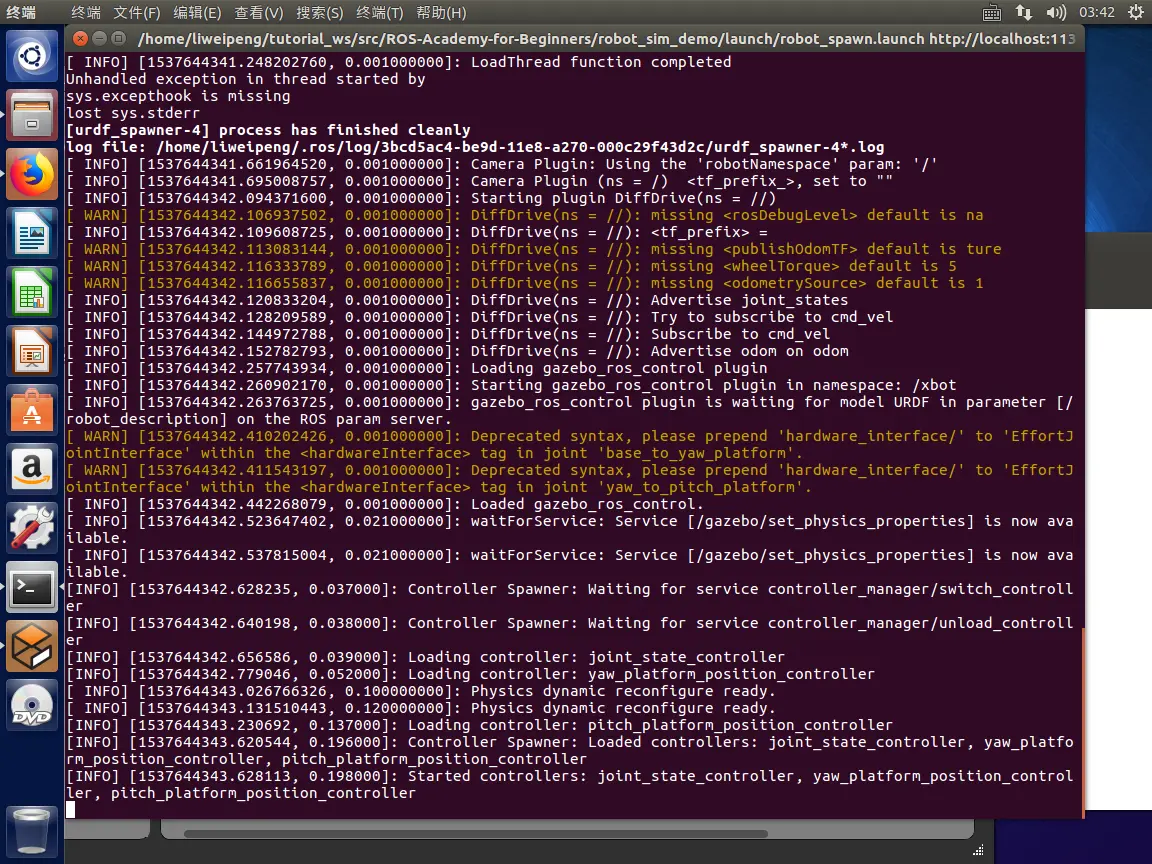
roslaunch robot_sim_demo robot_spawn.launch
下面是运行过程图(是的,一开始可能会遇到一个报错[robot_spawn.launch] is neither a launch file in package [robot_sim_demo] nor is [robot_sim_demo] a launch file name The traceback for the exception was written to the log file,然而下面的过程图已经是从报错到解决报错成功运行的过程了):
liweipeng@liweipeng-virtual-machine:~$ rospack profile
Full tree crawl took 0.189714 seconds.
Directories marked with (*) contain no manifest. You may
want to delete these directories.
To get just of list of directories without manifests,
re-run the profile with --zombie-only
-------------------------------------------------------------
0.141810 /opt/ros/kinetic/share
0.000770 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev
0.000257 * /opt/ros/kinetic/share/doc
0.000043 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev/haarcascades
0.000019 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev/lbpcascades
0.000008 * /opt/ros/kinetic/share/doc/liborocos-kdl
liweipeng@liweipeng-virtual-machine:~$ roslaunch robot_sim_demo robot_spawn.launch
[robot_spawn.launch] is neither a launch file in package [robot_sim_demo] nor is [robot_sim_demo] a launch file name
The traceback for the exception was written to the log file
liweipeng@liweipeng-virtual-machine:~$ roslaunch robot_sim_demo robot_spawn.launch
[robot_spawn.launch] is neither a launch file in package [robot_sim_demo] nor is [robot_sim_demo] a launch file name
The traceback for the exception was written to the log file
liweipeng@liweipeng-virtual-machine:~$ cd ~/tutorial_ws
liweipeng@liweipeng-virtual-machine:~/tutorial_ws$ roslaunch robot_sim_demo robot_spawn.launch
[robot_spawn.launch] is neither a launch file in package [robot_sim_demo] nor is [robot_sim_demo] a launch file name
The traceback for the exception was written to the log file
liweipeng@liweipeng-virtual-machine:~/tutorial_ws$ source ~/tutorial_ws/devel/setup.bash
liweipeng@liweipeng-virtual-machine:~/tutorial_ws$ rospack profile
Full tree crawl took 0.025369 seconds.
Directories marked with (*) contain no manifest. You may
want to delete these directories.
To get just of list of directories without manifests,
re-run the profile with --zombie-only
-------------------------------------------------------------
0.016329 /opt/ros/kinetic/share
0.008478 /home/liweipeng/tutorial_ws/src
0.008405 /home/liweipeng/tutorial_ws/src/ROS-Academy-for-Beginners
0.000169 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev
0.000036 * /opt/ros/kinetic/share/doc
0.000035 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev/haarcascades
0.000015 * /opt/ros/kinetic/share/OpenCV-3.3.1-dev/lbpcascades
0.000006 * /opt/ros/kinetic/share/doc/liborocos-kdl
liweipeng@liweipeng-virtual-machine:~/tutorial_ws$ roslaunch robot_sim_demo robot_spawn.launch
... logging to /home/liweipeng/.ros/log/3bcd5ac4-be9d-11e8-a270-000c29f43d2c/roslaunch-liweipeng-virtual-machine-2603.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
started roslaunch server http://liweipeng-virtual-machine:41819/
SUMMARY
========
PARAMETERS
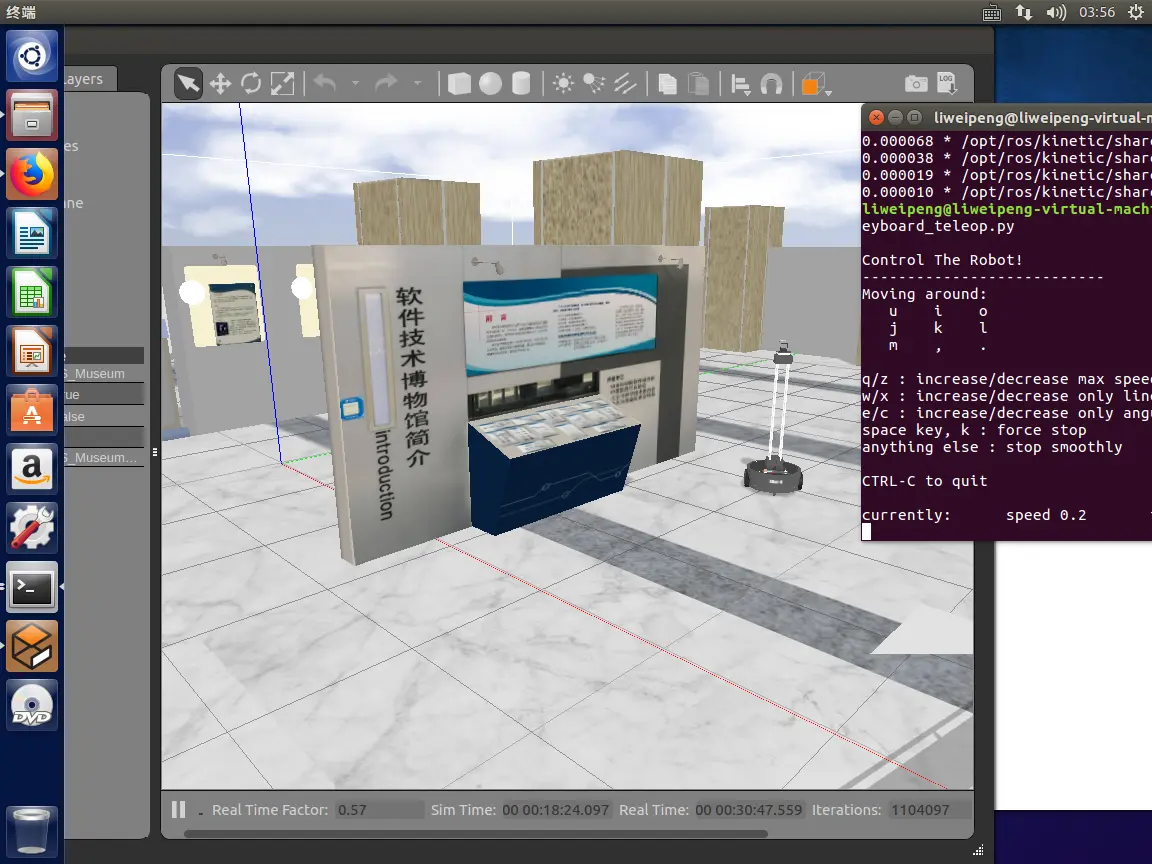
再打开一个终端,输入以下命令,用键盘控制机器人移动,聚焦控制程序窗口,按下i、j、l等按键,控制机器人移动:
rosrun robot_sim_demo robot_keyboard_teleop.py
过程图如下,记得运行前要刷新环境,或者用上面的方法把刷新命令添加到脚本:

呐,对比上图,我把它移到了简介牌的右边:


















 1277
1277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











