



1.PWM的概念
PWM指的是脉冲宽度调制,是一种利用微控制器的数字输出能力来控制模拟电路的技术。
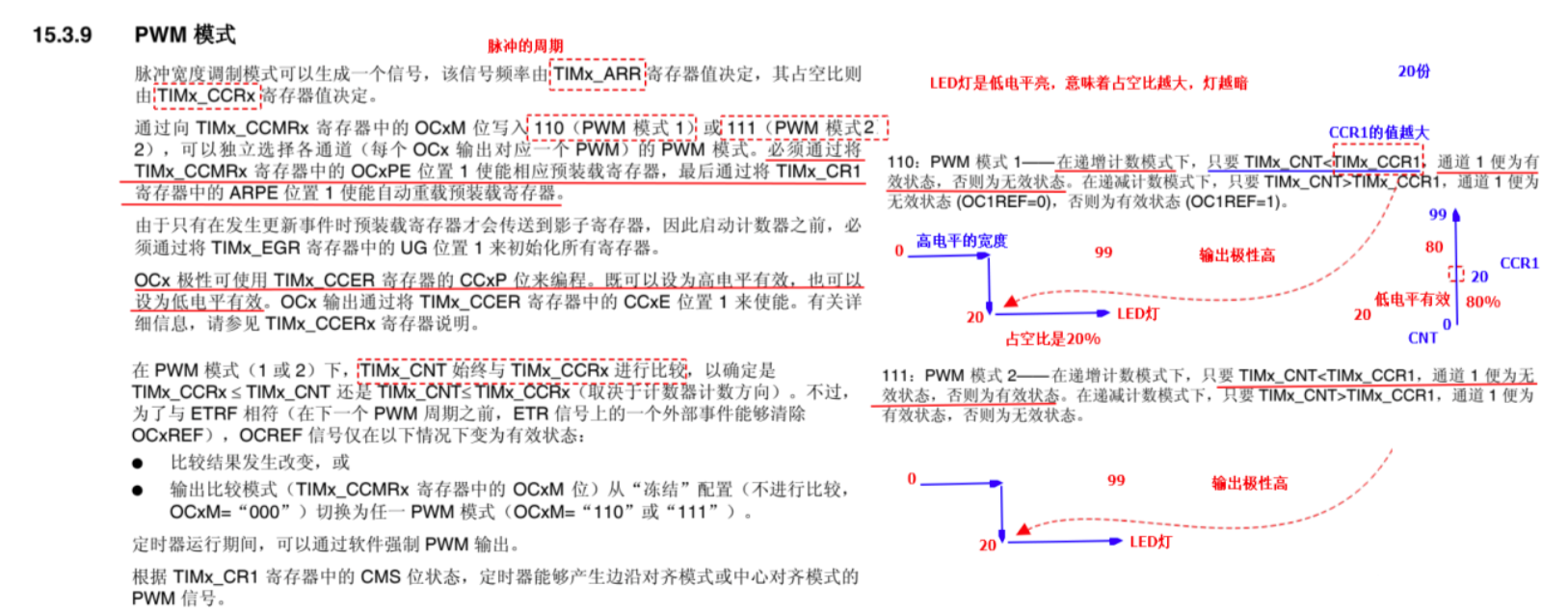
PWM技术的关键参数有两个,PWM 技术的关键参数有两个,一个是频率,一个是占空比,频率指的是利用 STM32 的定时,器通道输出脉冲的次数,占空比指的是一个周期内高电平所占的比例。
2.PWM的原理
配置定时器的PWM输出模式
外设到底是和哪个定时器的哪个通道连接在一起的? 参考芯片数据手册和原理图
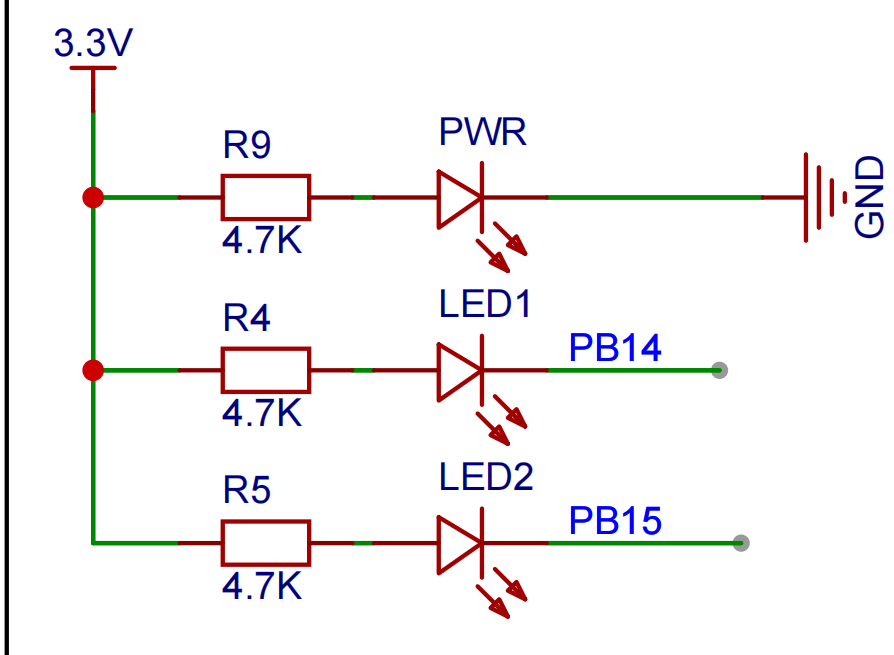

可知,假如我要实现LED1的亮灭程度由PWM控制,则需要初始化:
(1) 打开 GPIO 引脚的时钟 + 定时器的时钟
(2) 配置 GPIO 的引脚(引脚模式需要设置为复用模式) + 初始化 GPIO
(3) 把 GPIO 引脚的功能复用为对应的定时器
(4) 配置定时器的定时时间(预分频+自动重载值) + 初始化 TIM
(5) 配置定时器通道的参数(输出极性、PWM 模式.....) + 初始化定时器通道 TIM_OCxInit
(6) 使能定时器的预装载寄存器 调用 TIM_OCxPreloadConfig
(7) 使能自动重载预装载寄存器的 ARPE 位
#include "stm32f10x.h"
// TIM1 CH2 (PB14) PWM 初始化
void TIM1_PWM_CH2_Init(uint16_t arr, uint16_t psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 1. 使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 | RCC_APB2Periph_GPIOB, ENABLE);
// 2. 配置PB14为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 3. 定时器基本配置
TIM_TimeBaseStructure.TIM_Period = arr; // 自动重装载值
TIM_TimeBaseStructure.TIM_Prescaler = psc; // 预分频系数
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// 4. 配置PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
TIM_OCInitStructure.TIM_Pulse = 0; // 默认占空比为0
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
// 5. 使能主输出
TIM_CtrlPWMOutputs(TIM1, ENABLE);
// 6. 使能定时器
TIM_Cmd(TIM1, ENABLE);
}
// 设置PWM占空比(0~arr)
void TIM1_SetPWM_CH2(uint16_t compare)
{
TIM_SetCompare2(TIM1, compare);
}

















 2603
2603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









