






写在前面:
本文章旨在总结备份、方便以后查询,由于是个人总结,如有错误,欢迎指正;另外,内容大部分来自网络、书籍、和各类手册,如若侵权请告知,马上删帖致歉。
本文介绍有关伯德图和零极点的相关内容。
一、伯德图简介
电路的稳定性是指电路在受到外部干扰或内部参数变化时,能够保持其正常工作状态的能力。稳定性描述的是电路对输入的不同频率的干扰信号的抑制性能。
伯德图描述了在电路中输入信号频率的变化对输出信号的影响,该影响包括两方面的变化:增益和相位。
将系统对不同频率输入信号的增益画成曲线就是伯德图的增益(幅值)曲线,将系统对不同频率输入信号的相移画成曲线就是伯德图的相位曲线。
二、增益与相位
相位是指信号在某一时刻的状态,它描述了信号的波形相对于某个参考点的位置。相位通常用角度来表示,例如0度、90度、180度等。
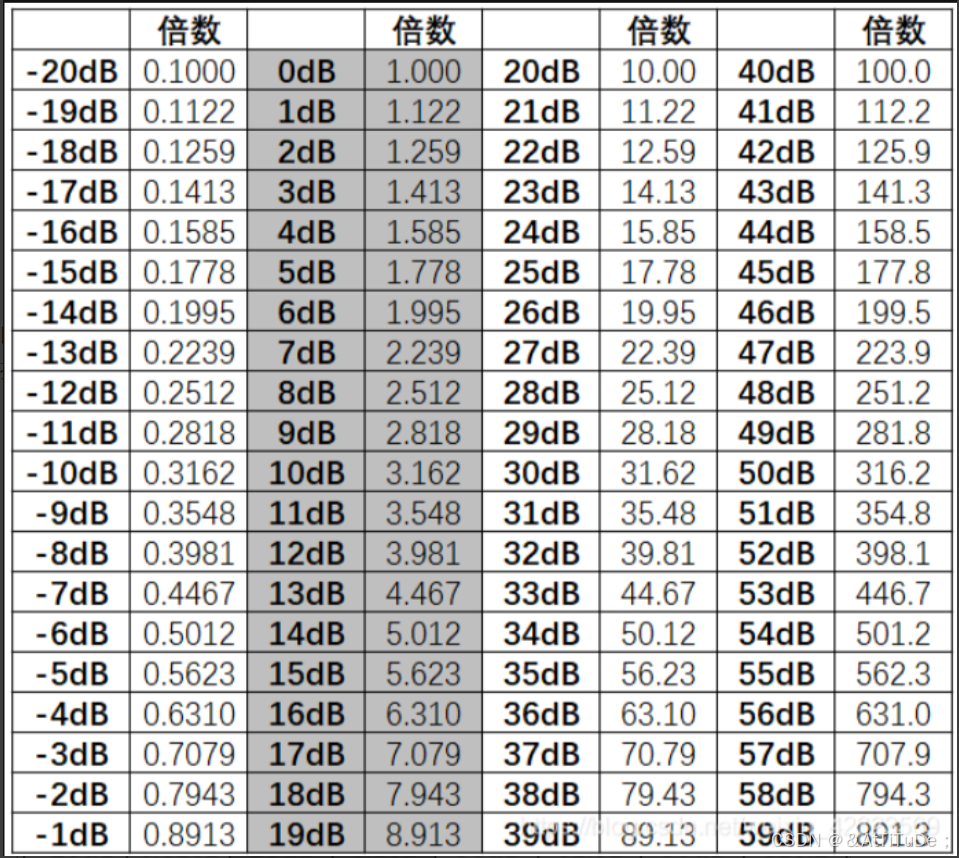
增益是指信号在经过某个系统或设备后,其幅度(或功率)相对于输入信号的增加倍数。增益的单位是分贝,可以简单理解为输出信号比输入信号的放大倍数。电压分贝和放大倍数有直接的对应关系,用y表示电压分贝,用x表示放大倍数,则y=20lg(x)。下表可以直观的看出dB单位与放大倍数的关系。
在伯德图中:
在增益为0dB处,对应穿越频率,对应着相位裕度。
相位裕度是相位响应曲线在穿越频率点(0dB)与-180度之间的相位差。
在相位为180度处,对应着增益裕度。
增益裕度是增益响应曲线在相位为-180度的频率点与0dB之间的增益差。
相位裕度、增益裕度表征着系统与不稳定性的“距离”。
相位裕度、增益裕度越大,说明控制系统越强健,越稳定。当然,如果相位裕度过大,意味着系统的响应速度慢,所以需要将相位裕度调整到合理范围内。
三、零点与极点
在伯德图实际应用中会经常碰到极点和零点的概念。极点和零点指的都是某个频率点。
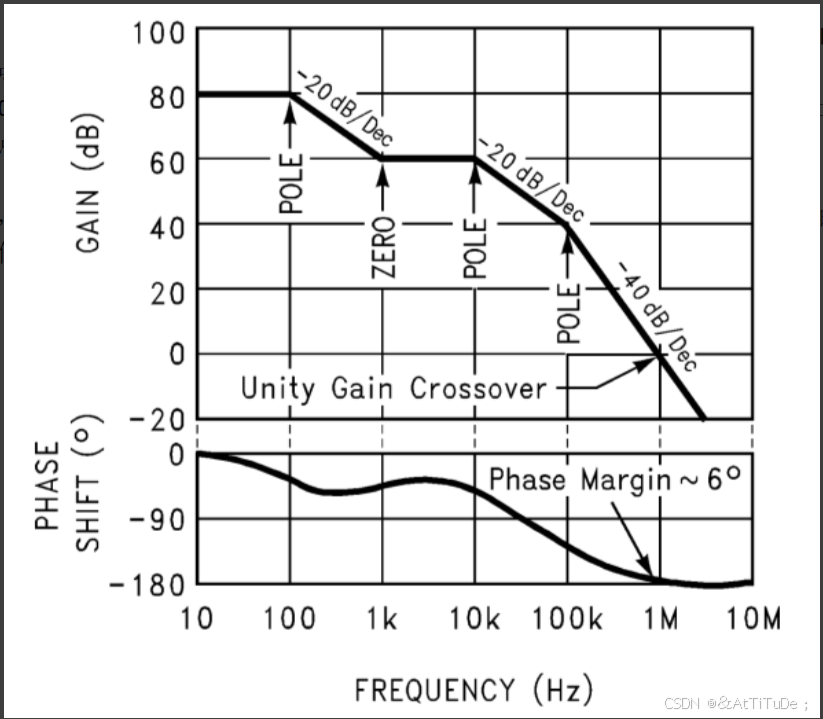
当某频率信号输入时,电路系统输出信号的幅度发生了衰减(增益衰减3dB),输出信号的相位产生滞后(相位滞后45°),这个频率点就是极点Pole(相频曲线-45°,频率无穷大-90°,这个频率点就是极点Pole)。在极点之后,随着频率增大,输出幅度进一步衰减,在伯德图上表现为在极点之后,增益按照-20dB/十倍频衰减。在极点之后,随着频率增大,相位进一步滞后,在伯德图上表现为在极点之后,相位按照-45°/十倍频衰减。
如果电路系统中有两个极点,随着频率增大,增益衰减,相位滞后至-180°,可能导致电路系统振荡。所以在大多数情况,我们并不希望存在极点。但是由于现实的元器件是有寄生参数的,所以极点是天然存在的。为避免电路输出振荡,我们一般人为地增加零点,所谓的频率补偿就是做这个事情。
零点Zero的作用就是抵消极点Pole的作用,矫正输出信号衰减的趋势,矫正相位滞后的趋势。在零点之后,随着频率增大,输出幅度进一步增大,在伯德图上表现为在零点之后,增益按照+20dB/十倍频增大。在零点之后,随着频率增大,相位进一步超前,在伯德图上表现为在零点之后,相位按照+45°/十倍频增大。
在下图中,零点的作用就体现在1kHz频率位置,零点抵消了前一个极点(100Hz)引起的增益衰减的作用。
在传递函数中,极点会使得传递函数的分母为零,零点会使得传递函数的分子为零。换句话说,极点会使得传递函数数学计算结果变为“极”大,零点会使得传递函数数学计算结果变为“零”。
通常在实际应用中,我们要求系统伯德图的相位裕度>45°,建议相位裕度在45°~80°之间,增益裕度>10dB,穿越频率的斜率-20dB/十倍频,此时可认为系统是强健稳定的。

















 4625
4625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









