



 本文详细介绍了针孔模型的概念,探讨了从世界坐标到相机坐标、再到图像坐标和像素坐标的转换过程,涉及外参矩阵、内参矩阵和投影矩阵在三维空间成像中的应用。
本文详细介绍了针孔模型的概念,探讨了从世界坐标到相机坐标、再到图像坐标和像素坐标的转换过程,涉及外参矩阵、内参矩阵和投影矩阵在三维空间成像中的应用。
目录
1.1 针孔模型
1、概念介绍
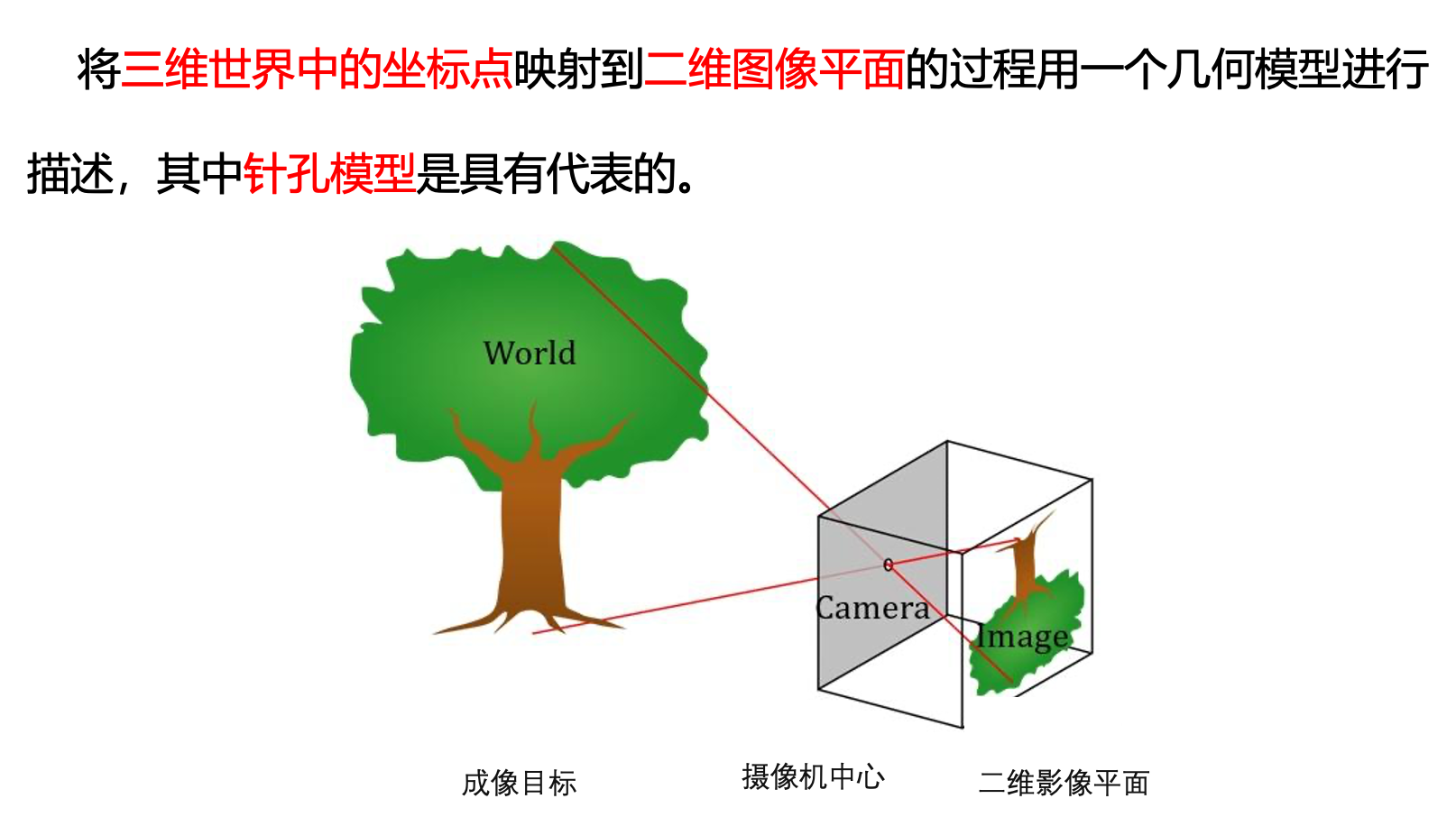
1.1 针孔模型
现实世界中源于某个物体的光线穿过针孔,会在底板上投影成一幅倒立的图像。真实世界的物体即为三维空间的成像目标,针孔为摄像机中心,倒影成像平面则为二维影像平面。
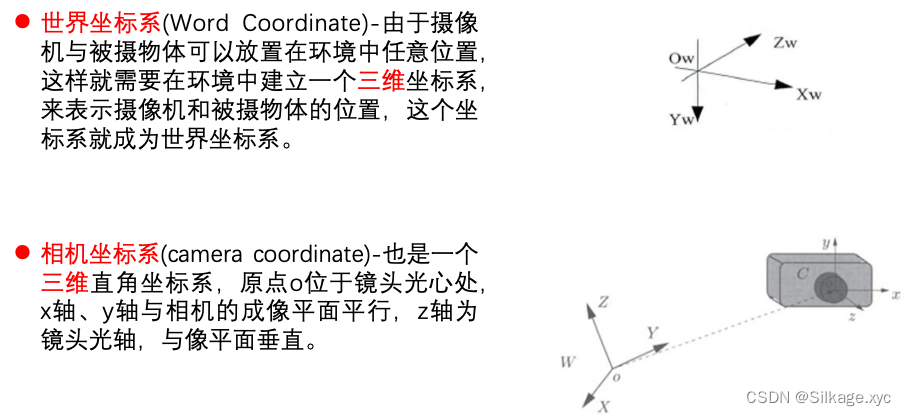
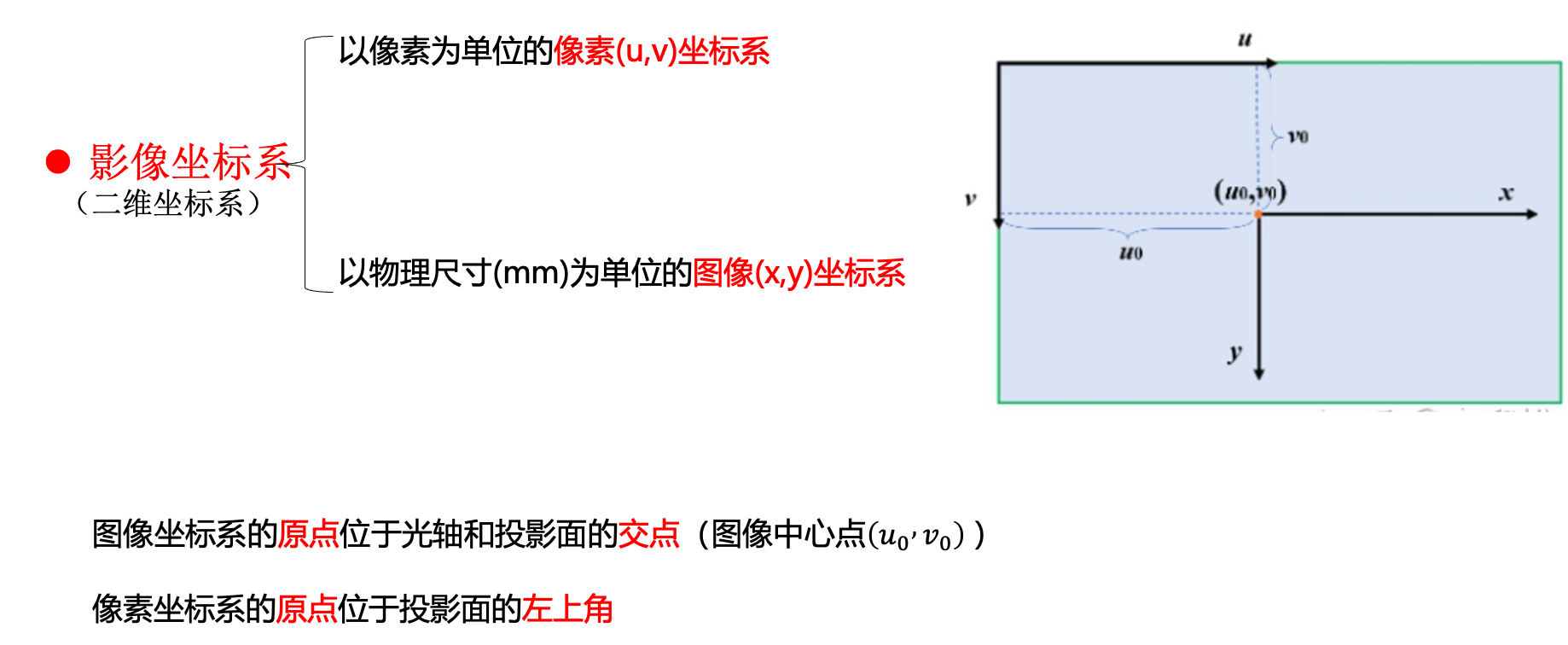
2、四种坐标的介绍
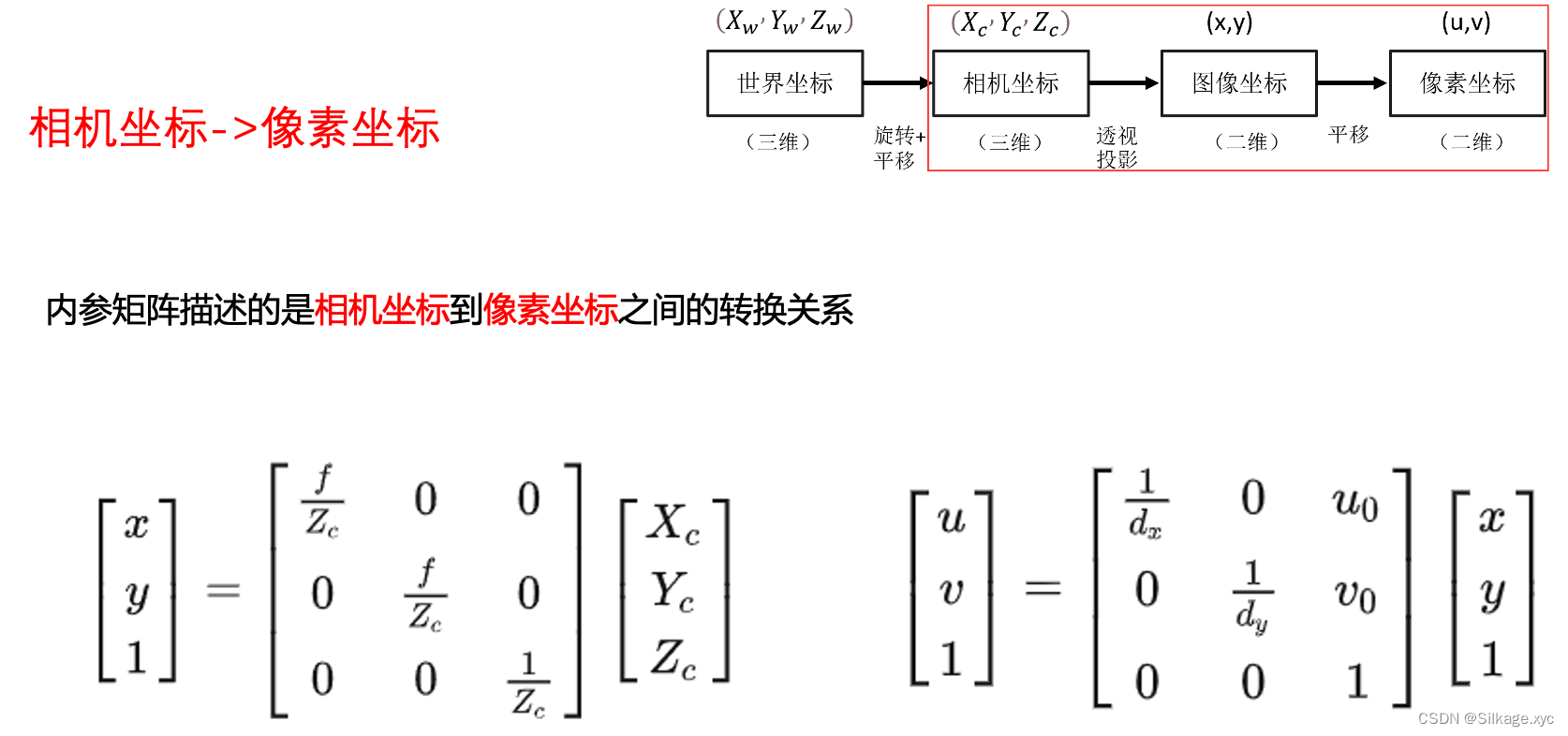
3、坐标转换关系图
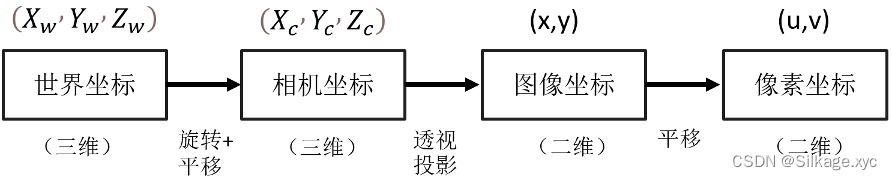
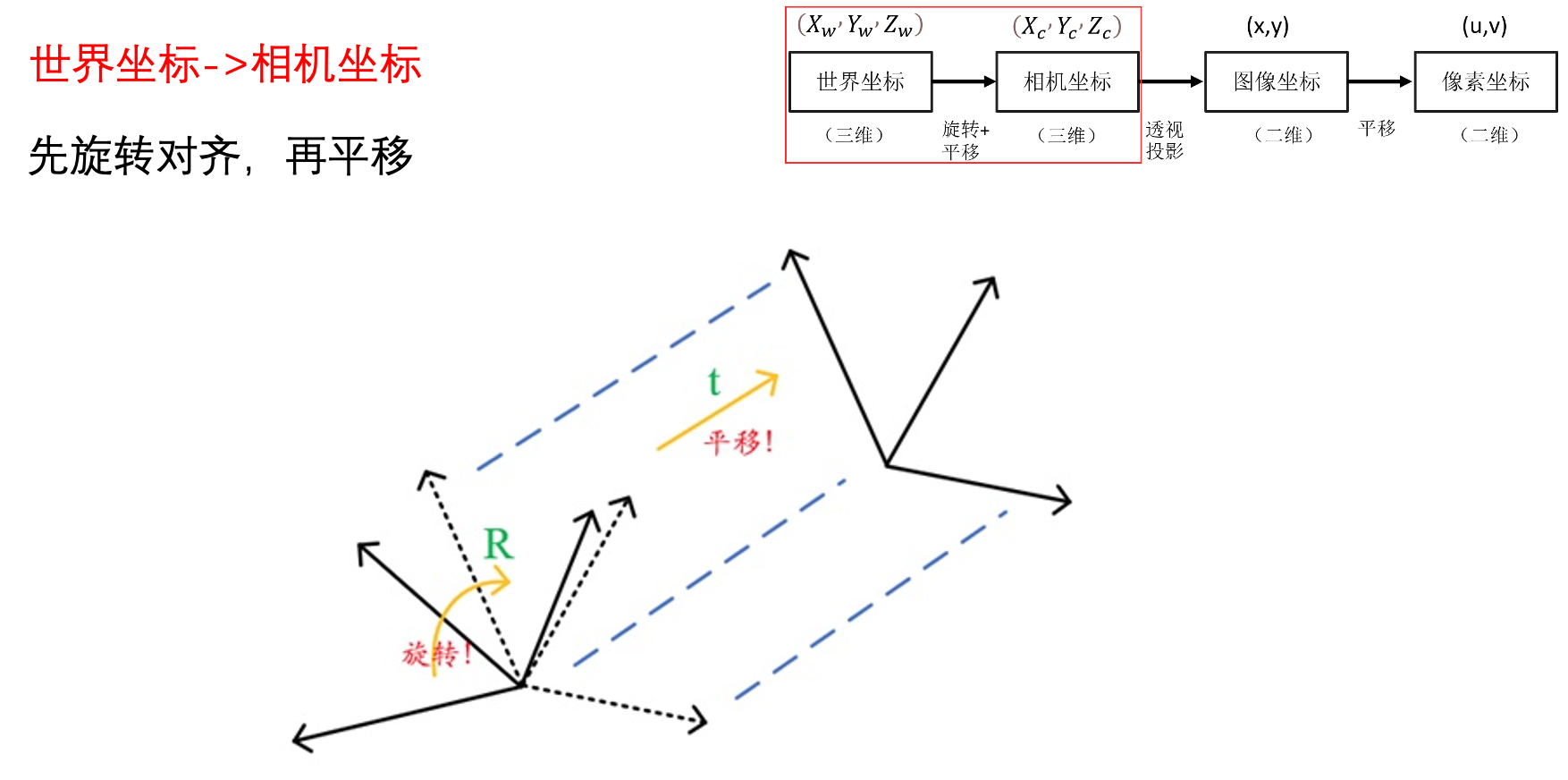
4、世界坐标->相机坐标
三维坐标到三维坐标的转换,只需要简单的旋转+平移即可
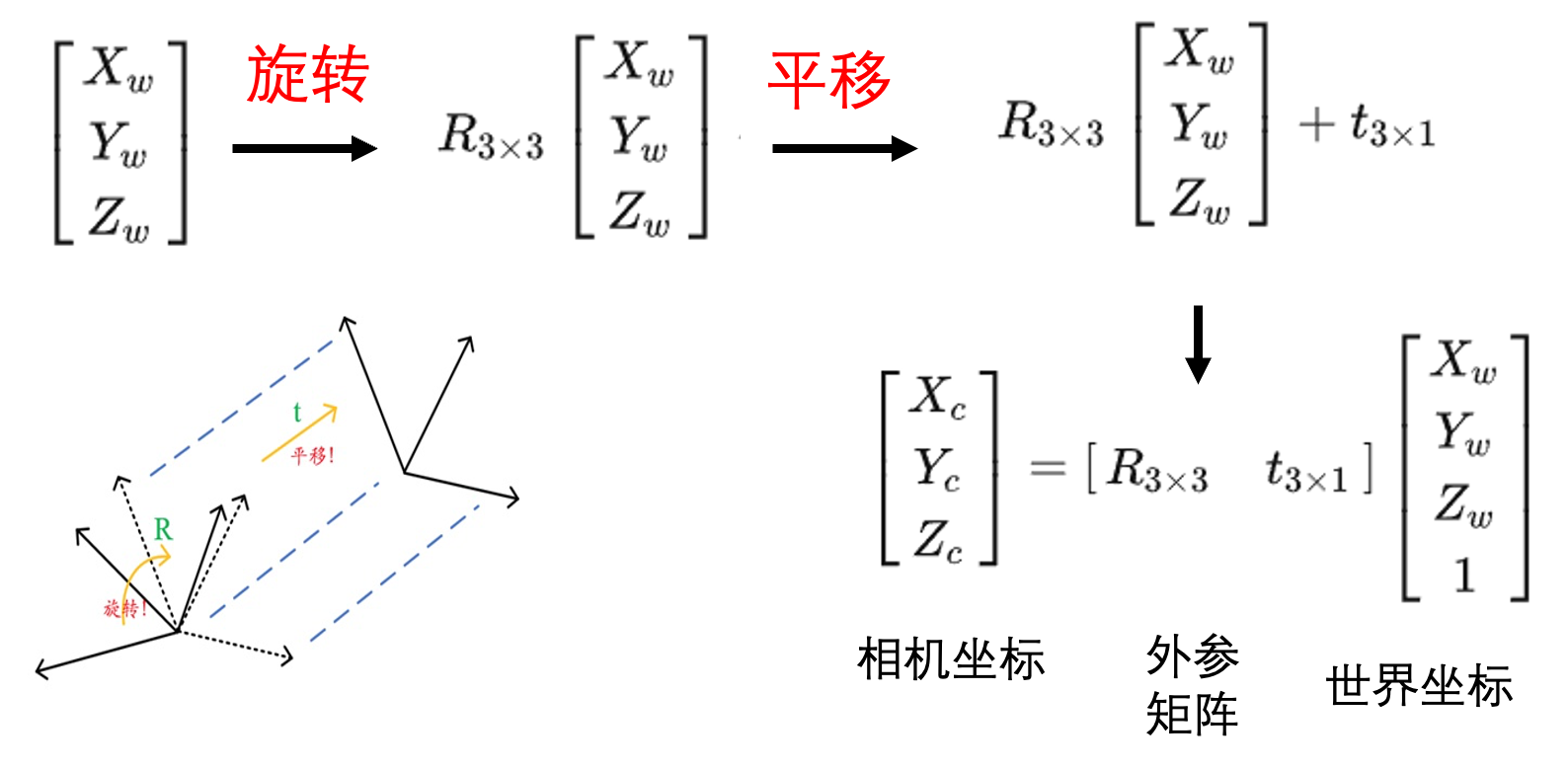
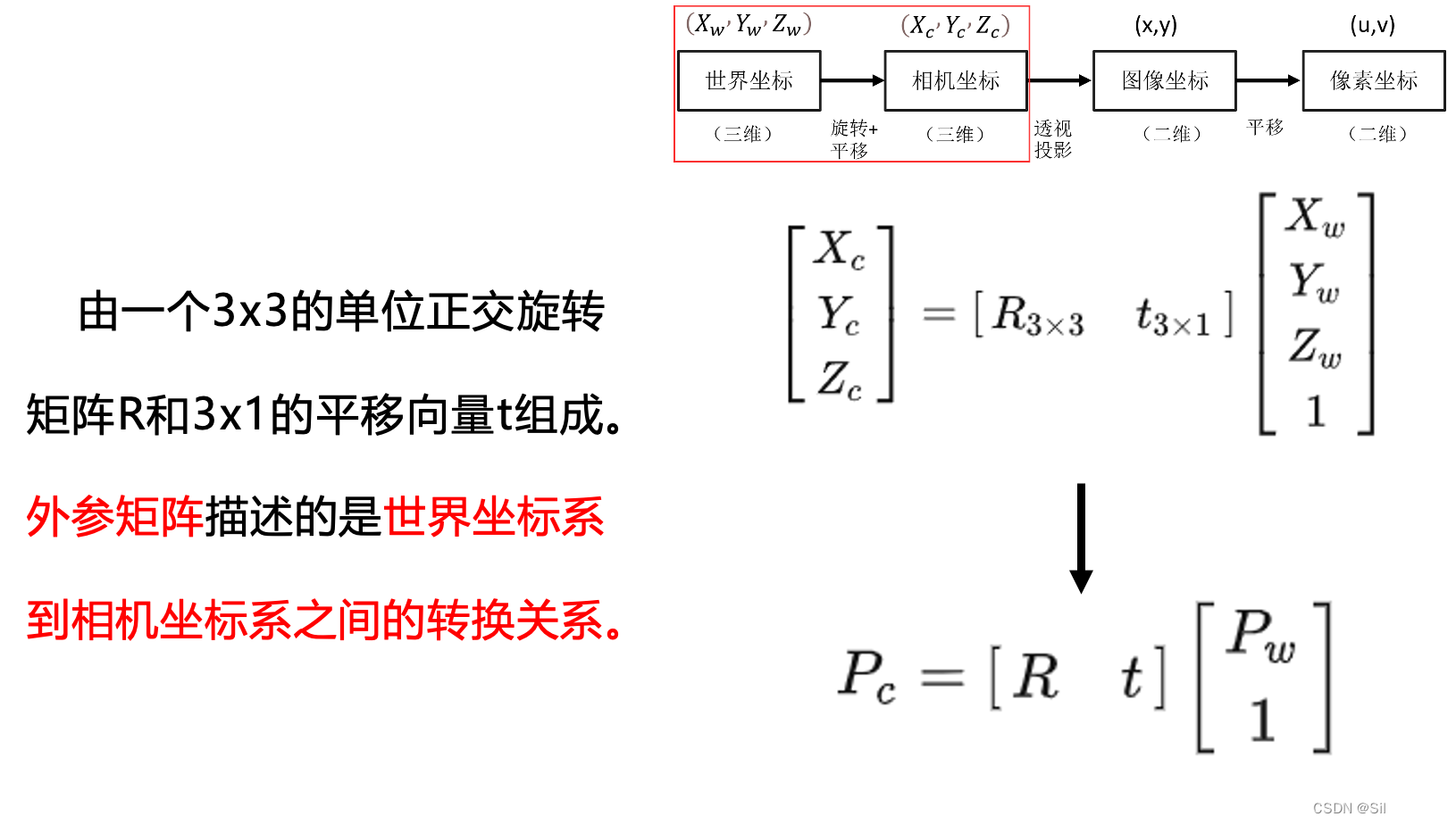
4.1 外参
世界坐标转换成相机坐标要乘以外参矩阵得到,外参描述的是世界坐标到相机坐标之间的转换关系。
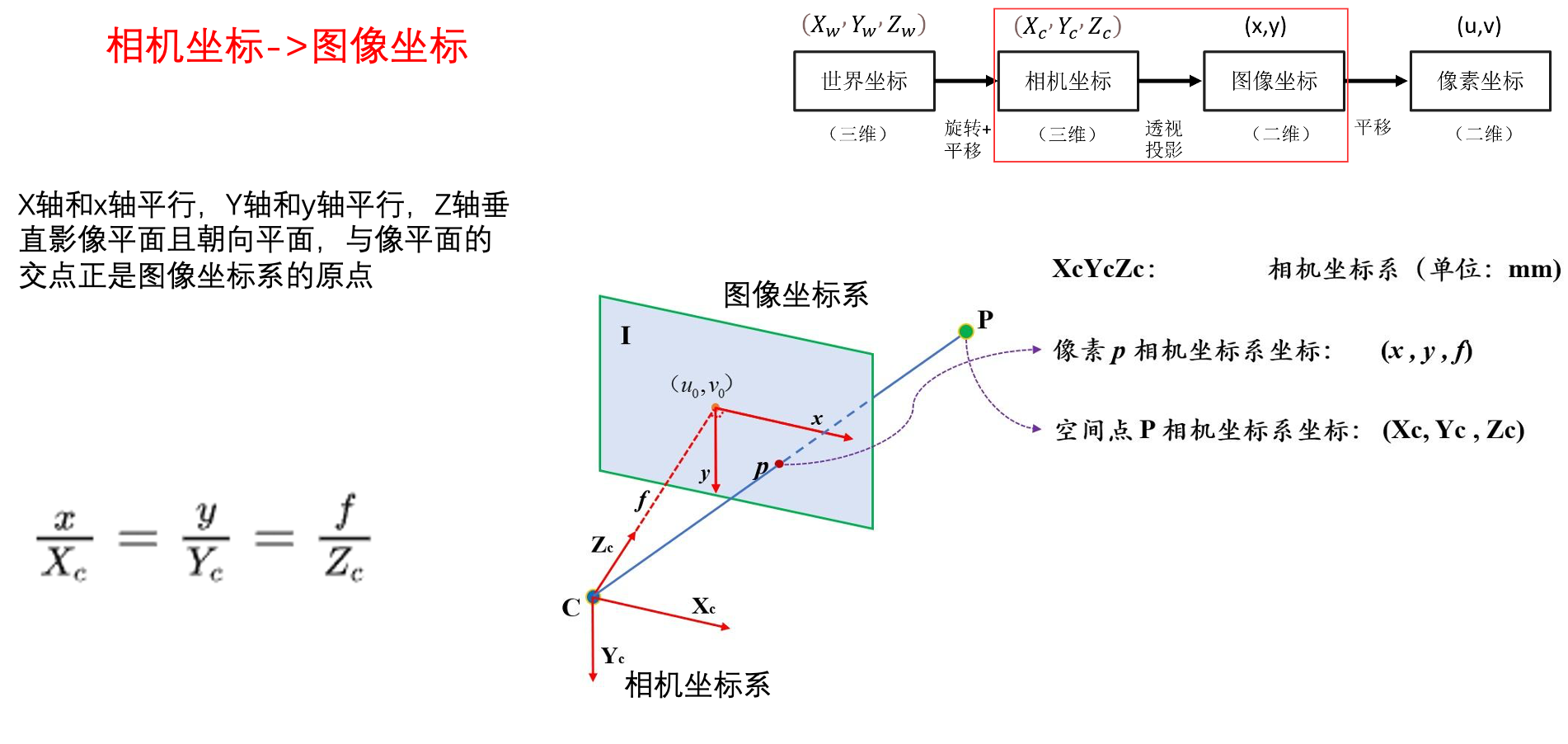
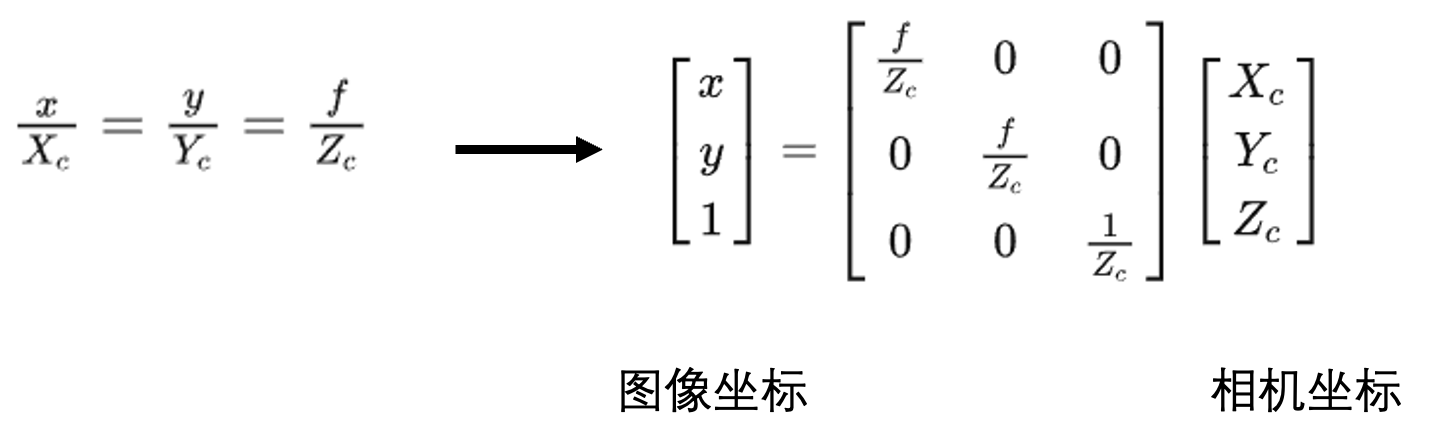
5、相机坐标->图像坐标
三维到二维的转换,要先将它们的坐标都化为相机坐标系下的坐标,这里图像上的坐标化为相机坐标要借助焦距f(因为图像到相机坐标系的原点的垂直距离为f),故像素p在相机坐标系下的坐标为(x,y,f),而空间点P在相机坐标系下的坐标为(X,Y,Z)。它们成比例关系。
图像上任意像素点在相机坐标系下的坐标为(x,y,f),(两个坐标系原点距离为焦距f),空间点的相机坐标系坐标为(X,Y,Z),将线段CP和线段Cp投影到三个相机坐标轴,都是相似三角形,成比例的对应关系
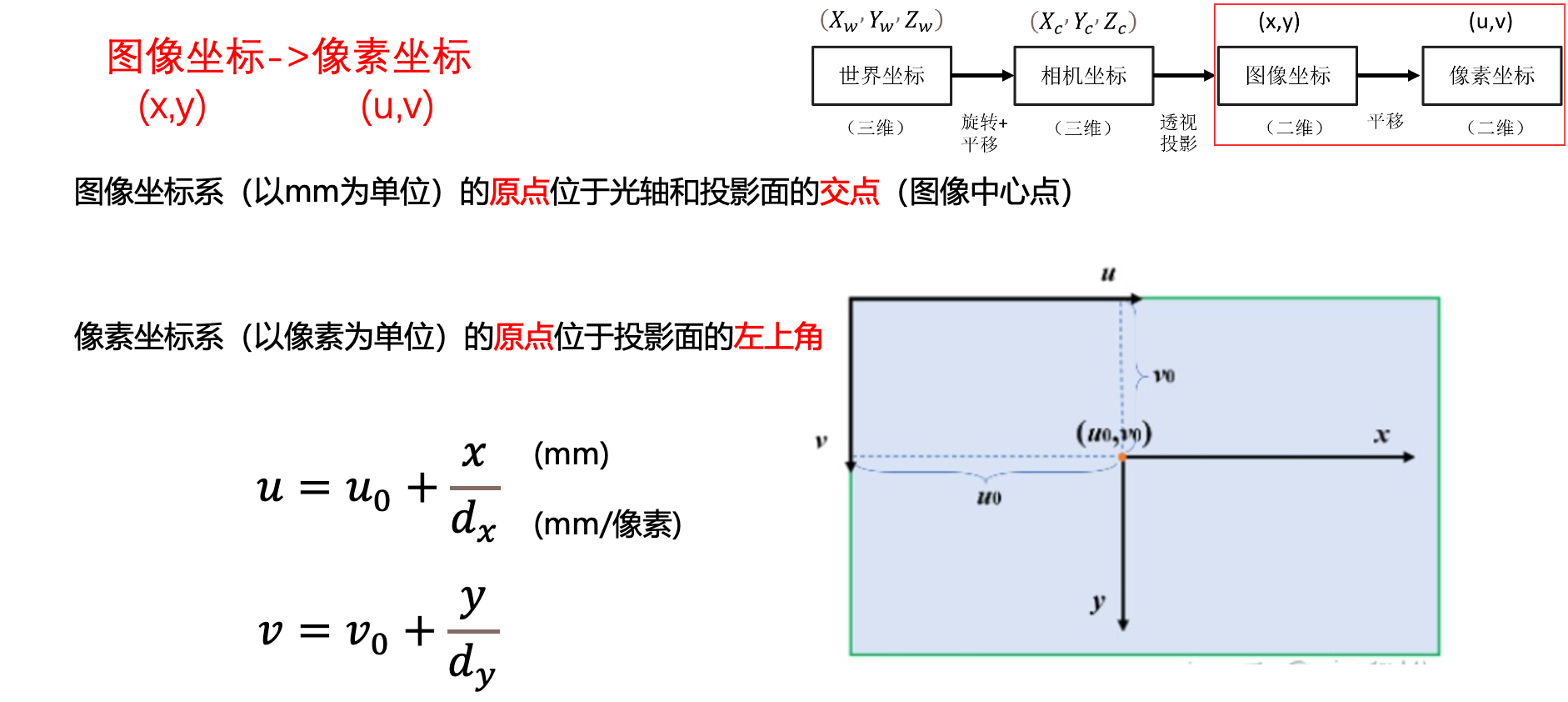
6、图像坐标->像素坐标
图像坐标和像素坐标都是二维坐标,并且图像坐标和像素坐标的单位不一样,故它们之间的转换只需平移即可(平移的同时要进行单位换算)。

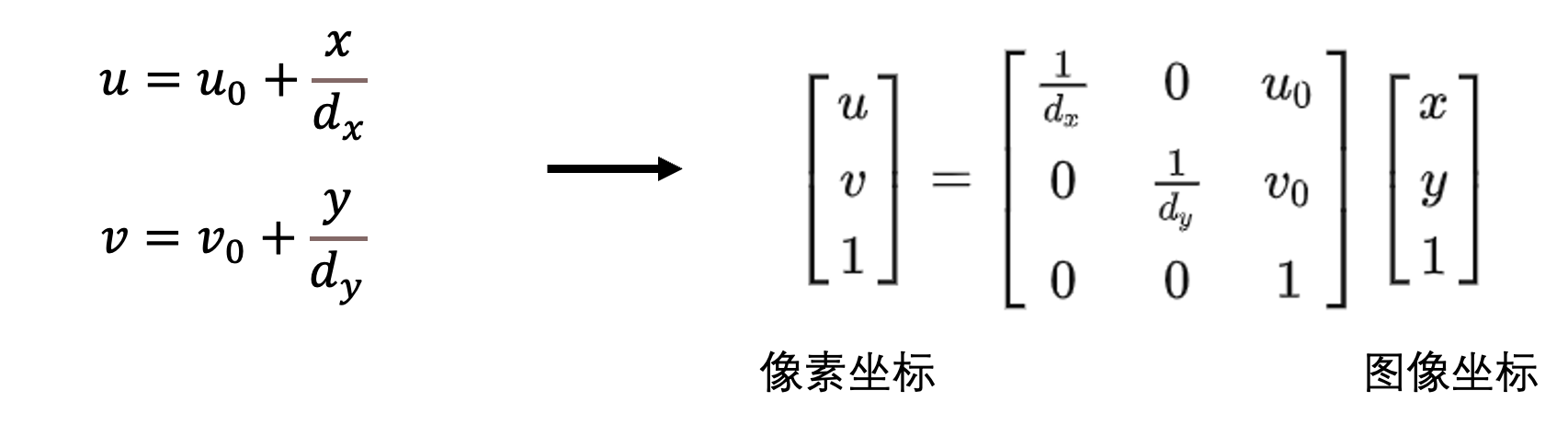
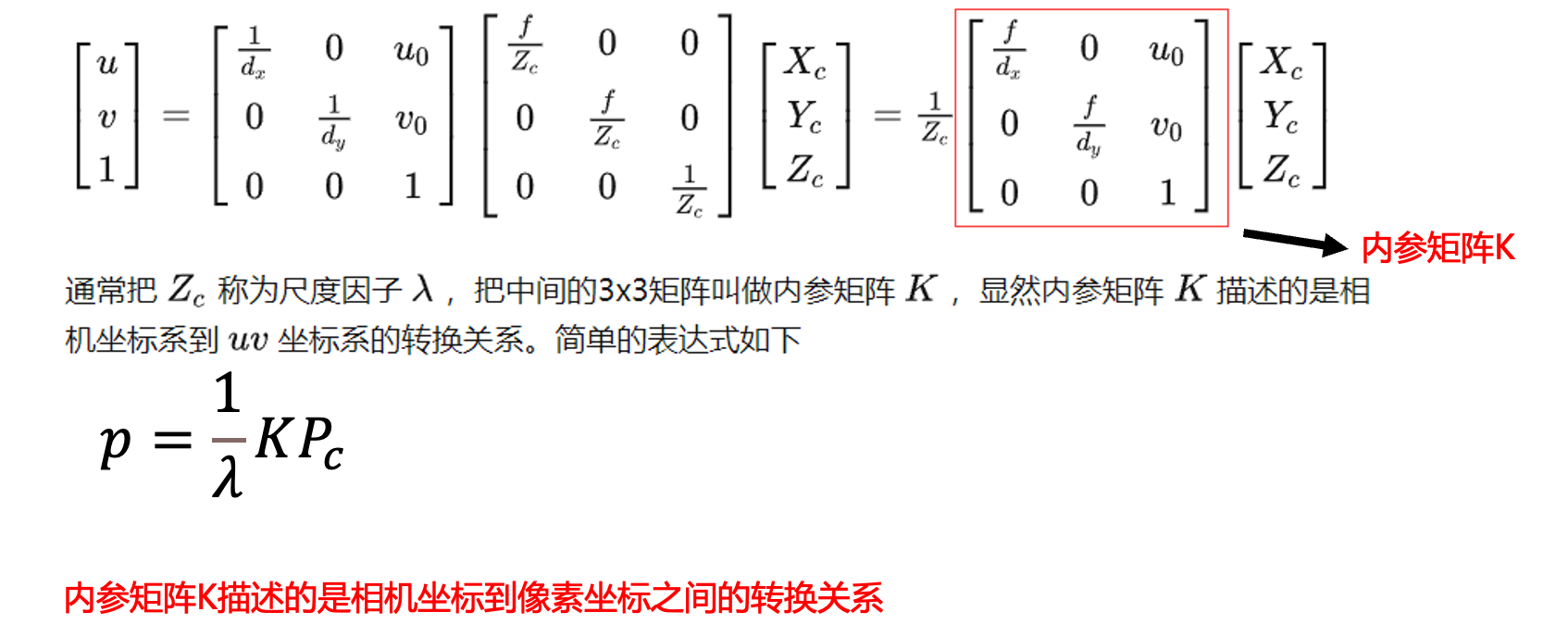
7、内参
相机坐标->像素坐标时需要使用内参矩阵,内参矩阵描述的是相机坐标到像素坐标之间的转换关系。
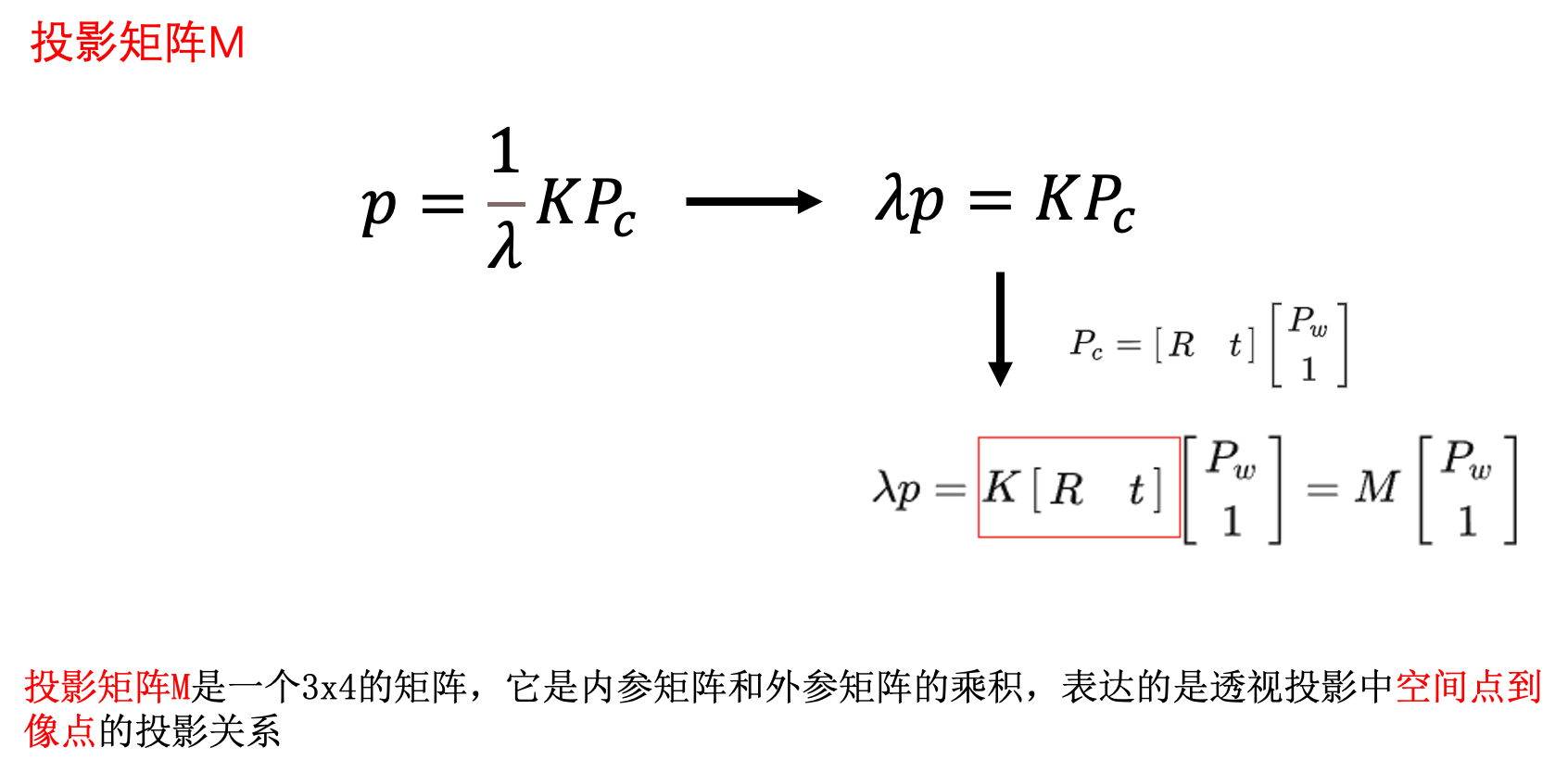
8、投影矩阵M
投影矩阵M是一个3x4的矩阵,它是内参矩阵和外参矩阵的乘积,表达的是透视投影中空间点到像点的投影关系。

















 1633
1633




 到【灌水乐园】发言
到【灌水乐园】发言







