






 本文详细介绍了采用Smart3Dcapture软件进行全自动快速三维建模的过程,包括数据预处理、空三加密、三维模型构建等步骤。通过空三解算获取高精度外方位元素,再利用多视影像密集匹配生成点云,构建三维模型并贴附纹理,最终生成清晰逼真的城市三维模型。整个流程涉及航空摄影、特征点匹配、平差计算、点云构建和纹理映射等多个关键技术环节。
本文详细介绍了采用Smart3Dcapture软件进行全自动快速三维建模的过程,包括数据预处理、空三加密、三维模型构建等步骤。通过空三解算获取高精度外方位元素,再利用多视影像密集匹配生成点云,构建三维模型并贴附纹理,最终生成清晰逼真的城市三维模型。整个流程涉及航空摄影、特征点匹配、平差计算、点云构建和纹理映射等多个关键技术环节。
采用法国Smart3Dcapture建模软件进行全自动快速建模生产,其生产流程如下:
1数据预处理
- List item首先创建photos.csv文件,其中包括倾斜影像数据的存储路径及下视影像的POS信息。其次创建cameras.csv文件,该文件记录每个相机的像素、像幅、焦距、主点、相机旋转参数方向参数及相机之间相对位置姿态参数等信息,主要用于创建空三工程时设置相机参数。然后根据创建好photos.csv和cameras.csv文件由工具生成block.xml文件,xml文件记录了工程的影像POS信息和相机参数信息。打开Smart3D Capture Master,导入预先生成的block.xml文件,软件自动根据block文件创建工程。导入block文件后,检查影像排序和相机旋转方向是否正确。
2空三加密
- 检查无误后,输入相应的数据参数提交空三工程。Smart3D首先会对五个视角的影像进行大量特征点提取,对获取的特征点采用多基线多特征匹配技术自动匹配同名点,然后采用光束法区域网平差进行整体平差计算,剔除粗差点。反复进行平差计算、点位调整,直到空三结果满足要求,输出空三加密报告,实现多视角影像空三解算。最后,得到每张影像精确的外方位元素及消除畸变差的影像,以供后续三维重建使用。
3三维模型构建
- Smart3D系统的三维重建过程是基于瓦片技术,本次试验把建模区域共分割成为672个300m×300m的“Tile”,将每一个瓦片打包建立成为一个任务,利用消除畸变差的多视影像和空三优化后的高精度外方位元素构建立体像对,采用多视影像密集匹配技术生成地物超高密度三维点云,然后按照设置的优先等级对分割区域内的三维点云构建不同层次细节度的不规则三角网(TIN)模型,通过三角网优化及简化后生成带白模的三维模型,然后在经过畸变差改正和匀光匀色处理后的影像(包括垂直影像和倾斜影像)上全自动提取位置对应的纹理信息,并将其映射到对应的模型的三角面片上,实现纹理贴附,最终生成纹理清晰逼真的城市三维模型成果.
4总结
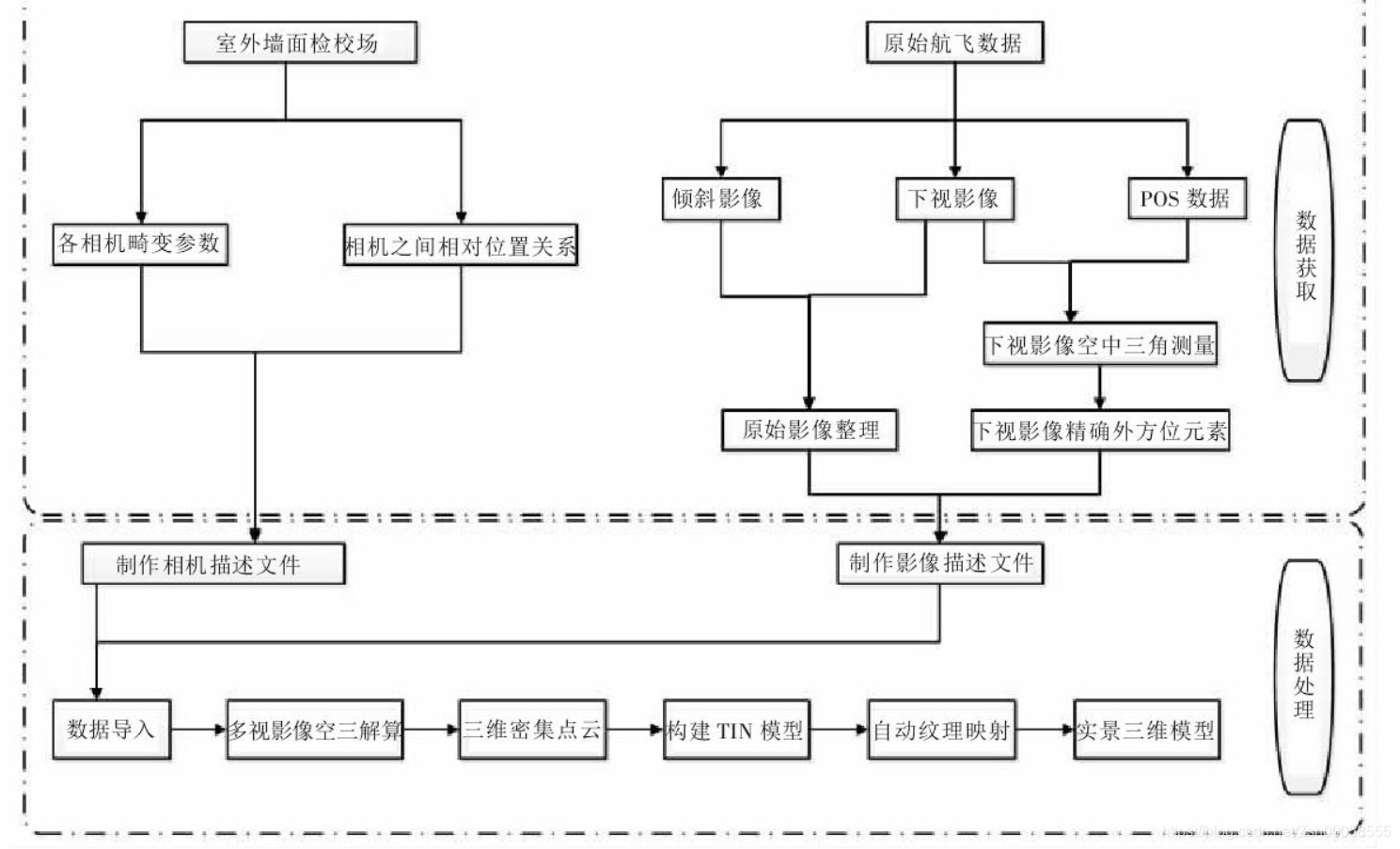
其主要过程包括:
(1)倾斜航摄仪平台及单相机检校、得到每个相机的镜头畸变参数及相机之间的相对位置关系;
(2)进行航空倾斜摄影,获取原始影像及下视POS数据;
(3)数据资料分析和预处理,包括原始影像畸变差改正及匀光匀色处理、下视影像空三解算、相机和影像描述文件制作等;
(4)数据处理,对倾斜影像进行空中三角测量,得到所有影像高精度外方位元素。利用畸变改正后的影像数据结合空三加密成果,通过多视影像密集匹配技术生成超高密度点云,然后基于点云构建不规则三角网模型;
(5)提取纹理信息,完成纹理映射;
(6)实景三维模型成果输出。
流程图如下
参考论文
《基于倾斜摄影测量技术构建实景三维模型的方法研究》

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









