




一、 实验目的
- 设计实现单总线结构 MIPS CPU 数据通路
二、 实验设备
- 硬件:个人电脑
- 软件:Logisim
三、 实验内容
- MIPS 指令译码器设计
- 实现微程序入口地址查找逻辑
- 实现判别测试逻辑
四、实验原理
微程序控制器组成原理

指令运行数据通路

取指令


- P0:取指令操作结束标志位
- xx_in:表示存入数据到对应位置
- xx_out:表示从对应位置取出数据
- 注意取指令最后一条命令的下址 DEC 可以不填,但是其他指令应该填 0(回到取值第一条)
lw

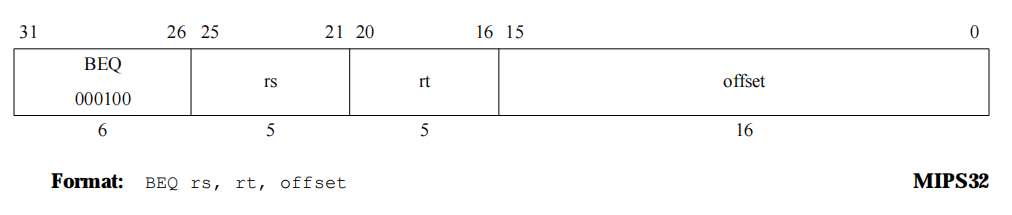
beq

寄存器堆的读端口虽然硬连着,但真正送上总线的是选中的一个输出。
于是,为了在不同节拍中选择输出谁,就使用一个多路选择器控制信号,比如:
Rout = 1 (使能寄存器输出到总线)
Rs/Rt = 0 (使用的是 R[rs])
Rs/Rt = 1 (使用的是 R[rt])
PSW 是一个标志寄存器,存储例如 Zero(等于)、Negative(负号)、Carry(进位)等状态。
这里我们只用到了:
PSW.equal = (X - R[rt] == 0),即R[rs] == R[rt]
I 型运算类指令 addi

R 型运算类指令 add

-
数据通路:
Z → R[rd] -
控制信号:
Zout = 1(将 Z 的内容输出到总线)Rin = 1(允许寄存器接收总线值)RegDst = 1(选择rd字段作为写回目标)
这个 RegDst 是关键控制信号之一,它决定将写回目标设为:
rt(当RegDst = 0,用于 I 型指令,如addi)rd(当RegDst = 1,用于 R 型指令)
SLT

| 时钟周期 | 数据流 | 控制信号(控制流) |
|---|---|---|
| T5 | R[rs] → X | Rout = 1,Rs/Rt = 0,Xin = 1 |
| T6 | X < R[rt] → Z(ALU 比较) | Rout = 1,Rs/Rt = 1,SLT = 1(或 ALUOp = slt) |
| T7 | Z → R[rd] | Zout = 1,Rin = 1,RegDst = 1 |
指令周期

指令控制流

五、 实验步骤
1. MIPS 指令译码器设计
将 MIPS 指令字翻译成不同的指令译码信号,各译码信号代表不同的指令,通过查表可得对应的常量值






FUNCT 为跳转的下一个地址,2a 为 SLT 对应的下一个地址
2. 实现微程序逻辑
使用微程序自动生成工具生成,根据对应的操作填写 excel 表格

其中
- RegTgt 对应 Rs/Rt 功能,表示取 Rt
- RegDst 表示操作 Rd
- 取指令的最后一条 P0 需要置一,Beq 跳转指令 P1 置一,用于标识和跳转
- 注意 BEQ 的跳转操作
然后将生成的十六进制微指令复制到控制储存器中

3. 实现微程序入口地址查找逻辑
在微程序控制的 CPU 中:
- 每条机器指令(如
add,lw,beq)都是由 一段微程序(microprogram) 实现的; - 每段微程序通常存储在 控制存储器(Control Store) 中;
- 执行某条机器指令时,要先找到该微程序的起始地址(即“微程序入口地址”),并从那里开始解释执行微指令。
所以: “微程序入口地址查找逻辑” 就是根据机器指令(如 opcode 字段)来决定微程序的起始地址。
要在完成上一步的基础上,填写各个指令起始位置的编号
填写微程序地址入口表,自动生成微程序入口查找逻辑子电路


4. 实现条件判别逻辑
根据微指令字中的判别测试字段和条件反馈信息生成后续地址的多路选择信号,实现要求的对应组合逻辑


- 下址字段:列出了多个可能的“下一条微指令地址”,类似于一个 case 列表(P0、P1、…、Pj)
- 判别字段:用于指定本条微指令希望测试哪个条件(如
Zero,Overflow等) - 微操作控制字段:控制实际操作(例如寄存器传送)
本实验中关于跳转的操作只有取值指令和 BEQ 指令,且两个指令不可能同时出现:
- 取值指令:P0 置一
- BEQ 指令:P1 置一且 Equal 置一

根据上面两个条件生成电路即可(注意逻辑要和第五步中的对应),设定:
- 00:下址字段
- 01:微程序入口:
P0 ~P1 - 10:BEQ 跳转:
~P0 P1 equal

5. 完善微程序控制器
指令跳转逻辑

下一条将要执行的指令由判别测试逻辑(第四步)来选择。
注意 BEQ 指令处的常数(十六进制),对应 BEQ 跳转逻辑,否则会回到取值指令处

应该将时钟改为下降沿有效,因为要先进行操作的执行,之后再进行指令跳转

六、 调试过程、结果和分析
在 CPU 主电路 RAM 存储器中载入排序程序 sort-5.hex 时钟频率 4KHz

程序最后一条指令死循环,查看数据存储器中排序情况,有符号降序排列


















 6254
6254

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









