




一、Pico SDK安装&pico-examples下载
1.1 Pico SDK的“三剑客”安装
我们先一键部署Pico SDK, Pico SDK下载地址如下:
raspberrypi / pico-setup-windows:https://github.com/raspberrypi/pico-setup-windows。
warning:实际上,在该仓库的README中,我们可以看到该仓库已存档并停止更新,官方更推荐VSCode上的Raspberry Pi Pico扩展插件,但这并不影响我们下载。

笔者将其安装在自定义的embedded_dev_tools文件夹下,其命名为Pico_SDK_v1.5.1。

其中有三个关键的依赖:
pico-sdk是核心开发库,提供基础API和构建系统。picotool是依赖 pico-sdk 的独立工具,负责二进制处理和设备交互。pico-sdk-tools可能是工具集的统称,涵盖 picotool 或其他辅助工具。
pico-sdk、picotool、pico-sdk-tools三者共同构成完整的开发工具链,覆盖从代码编写、构建到固件部署的全环节。
1.1.1 pico-sdk
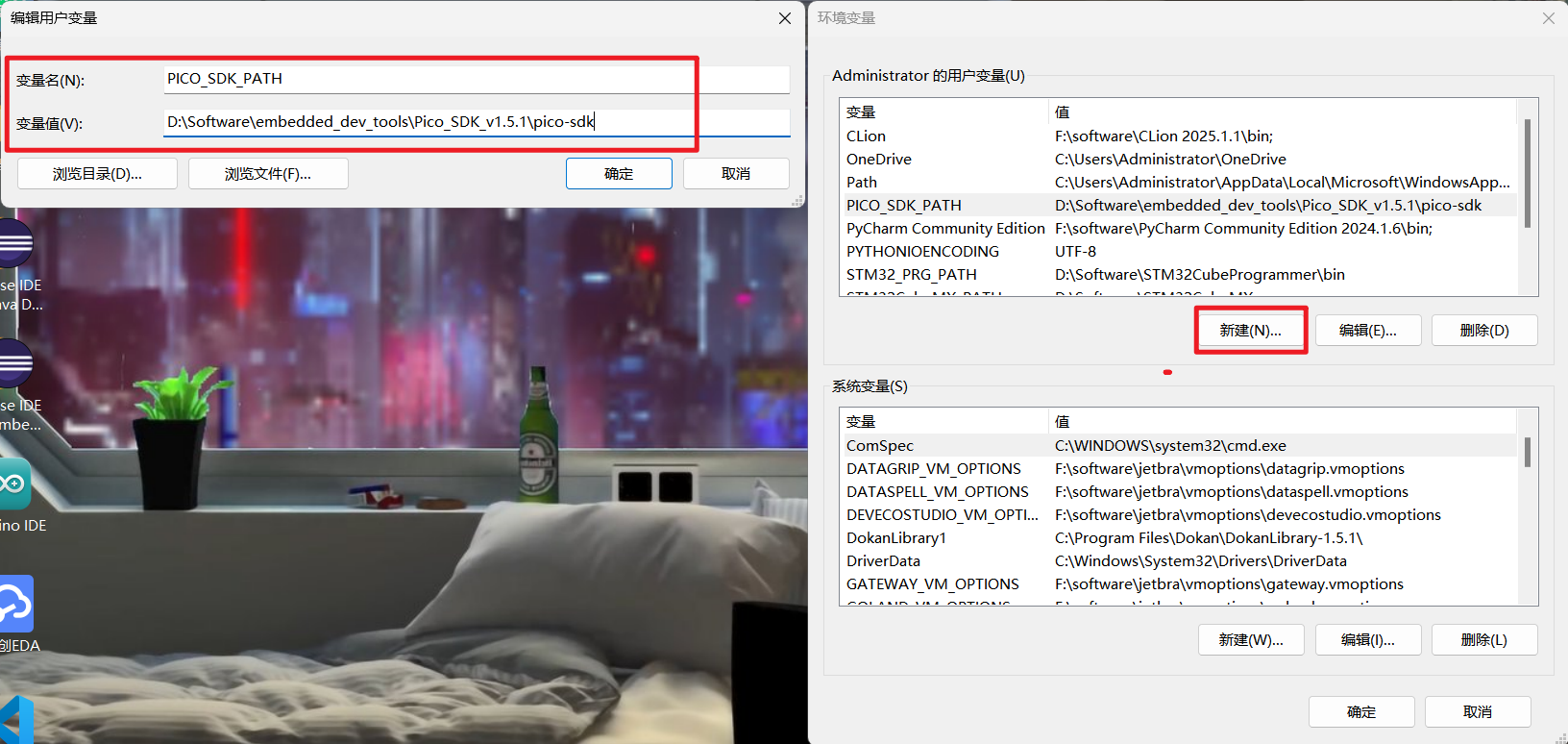
pico-sdk是Raspberry Pi Pico 系列的核心软件开发工具包,负责提供 C/C++ 开发环境、硬件抽象层(HAL)和底层库。
设置环境变量:按下Win键→输入“查看高级系统设置”→点击环境变量→在用户变量区中,新建一个用户变量名称
PICO_SDK_PATH,如下图添加,之后一直点击确定即可。
1.1.2 pico-sdk-tools
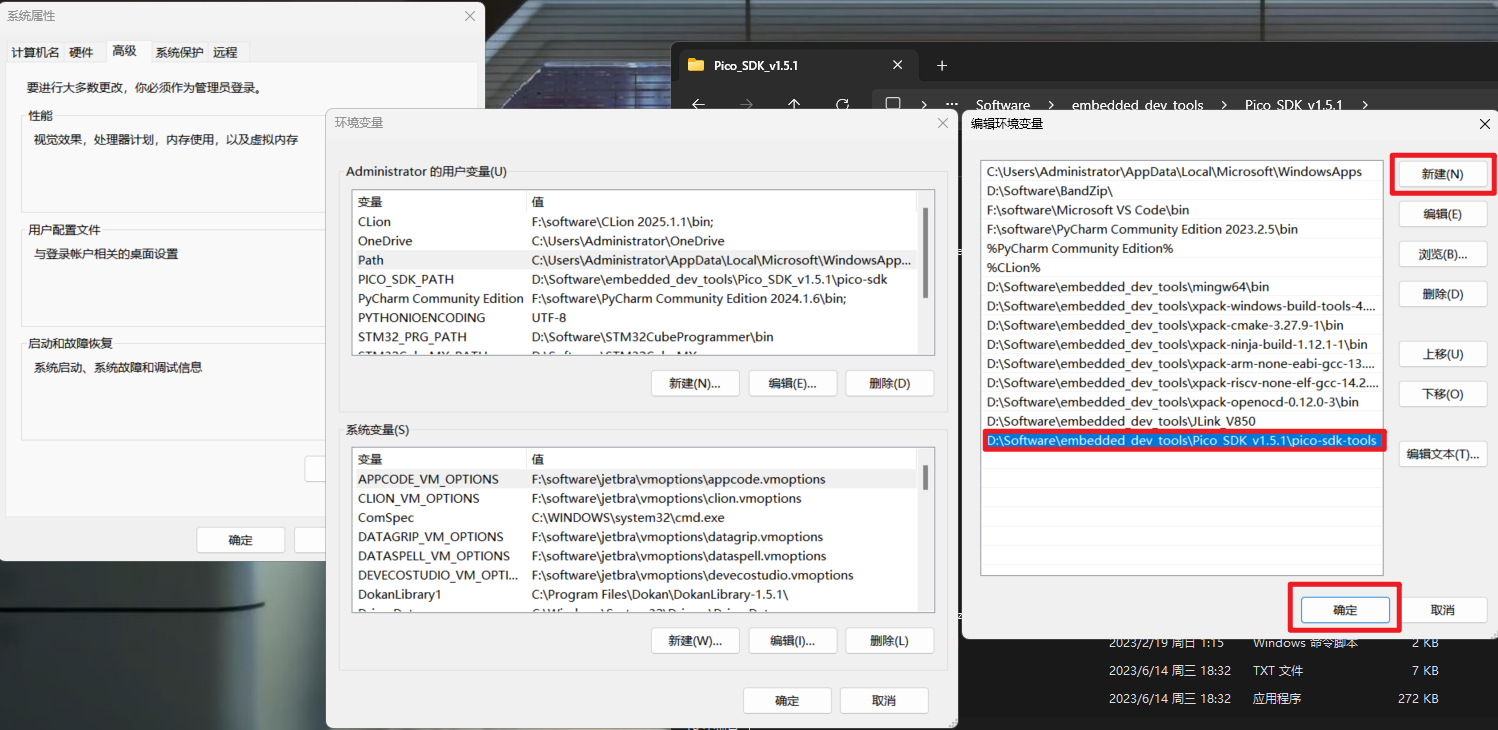
pico-sdk-tools是 pico-sdk 的配套工具集合,依赖于 pico-sdk ,可能包含开发流程中的辅助工具(如日志分析、固件生成),提供自动化脚本或工具简化开发流程(如批量编译、烧录)。
设置环境变量:按下Win键→输入“查看高级系统设置”→点击环境变量→双击Path→添加
pico-sdk-tools路径,如下图添加,之后一直点击确定即可。
1.1.3 picotool
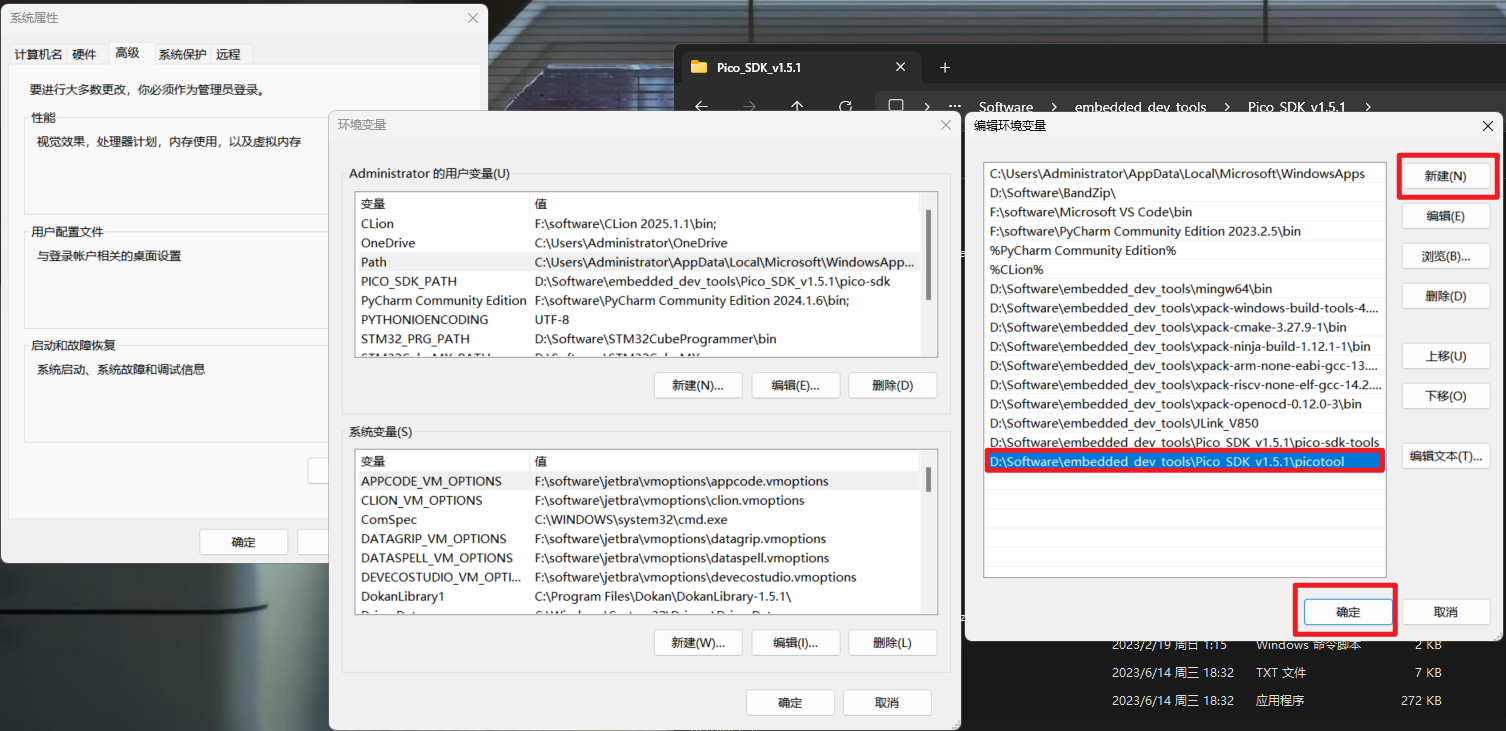
picotool是专用于 RP2040/RP2350 设备的二进制处理和设备交互工具,pico-sdk 调用 picotool 完成固件转换(如 ELF→UF2)、签名等操作。
设置环境变量:按下Win键→输入“查看高级系统设置”→点击环境变量→双击Path→添加
picotool路径,如下图添加,之后一直点击确定即可。
1.2 pico-examples例程包
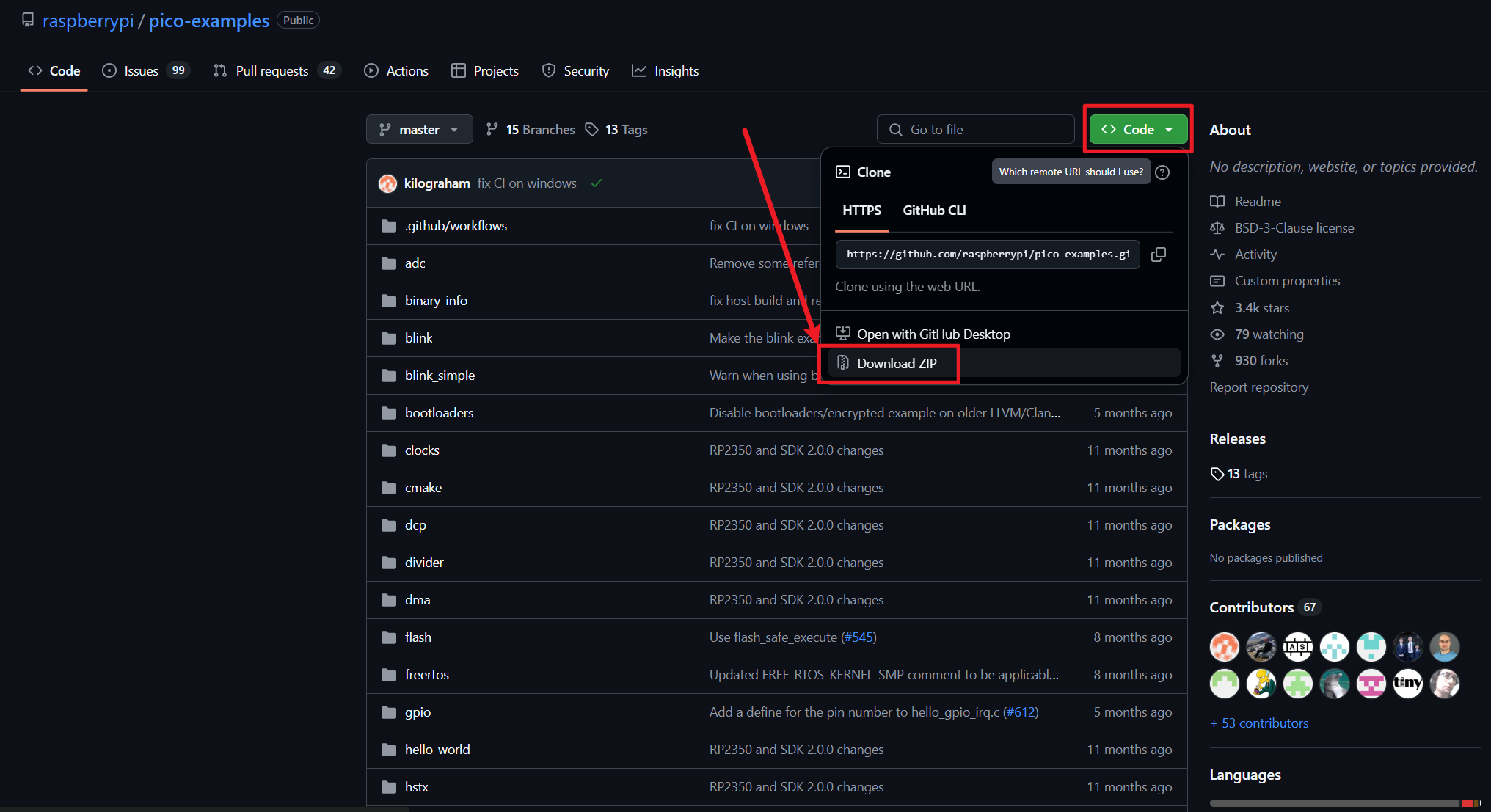
pico-examples例程地址:https://github.com/raspberrypi/pico-examples,按下图所示,下载 pico-examples 压缩包。
我们将该pico-examples例程包解压缩后,无需设置环境变量,拷贝放在常用文件夹即可,里面有许多外设文件和demo工程供我们参考使用。
1.3 arm交叉编译器安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入arm-none-eabi-gcc -v确认是否安装成功。
1.4 CMake工具安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入cmake -v确认是否设置成功。
1.5 Ninja构建工具安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入ninja --version确认是否设置成功。
1.6 GNU Make构建工具安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入make -v或者where make确认是否设置成功。
1.7 openocd调试工具安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入openocd -v确认是否设置成功。
1.8 J-Link下载工具安装
下载地址:https://www.segger.com/downloads/jlink/JLink_Windows_x86_64.exe
安装.exe到固定的安装目录,并设置环境变量,在cmd中输入jlink -v确认是否设置成功。
1.9 MinGW64—类Unix环境安装
解压缩到固定的安装目录,并设置环境变量,在cmd中输入gcc -v确认是否设置成功。
1.10 Python环境安装
安装.exe到固定的安装目录,并设置环境变量,在cmd中输入python --version确认是否设置成功。
1.11 Git Bash环境安装
安装.exe到固定的安装目录,并设置环境变量,在cmd中输入git -v确认是否设置成功。
打开 开始菜单,键盘输入 git ,可确认是否装上Git Bash。

二、VSCode插件



Tips:
无需安装CMake、CMake Tools、Raspberry Pi Pico这3个插件,只需安装CMake Highlight插件,用于高亮显示CmakeLists.txt的语法。
至于原因的话,CMake和CMake Tools插件的作用是在VSCode中产生内置的CMake GUI,但我们不需要用GUI界面,而是使用后面的tasks.json中的自定义CMake命令,写入VSCode的内置终端执行即可。
因此我们禁用掉下述3个插件:


三、创建Pico rp2040 demo工程
笔者的工程目录和结构如下图所示,

其中:
-
.vscode目录为VSCode的内置json文件,需手动创建并自定义内容; -
build目录无需手动创建,后续用命令配置CMake的时候会自动产生; -
USER目录为自定义代码目录; -
CMakeLists.txt为CMake构建脚本; -
pico_sdk_import.cmake在Pico SDK包的\Pico_SDK_v1.5.1\pico-sdk\external文件夹中拷贝,如下图所示,pico_sdk_import.cmake文件见名知义,是引用Pico SDK中的 API 和 库文件。

至此,demo工程初步创建完成。
四、.vscode文件的json脚本配置
4.1 settings.json
⭐内容无需修改,开箱即用⭐。
{
// 字符集编码选择
"files.encoding": "utf8",
// 自动保存任意文件
"files.autoSave": "afterDelay",
// 文件图标主题:"material-icon-theme"
"workbench.iconTheme": "material-icon-theme",
// 颜色主题设置
"workbench.colorTheme": "Default Dark Modern",
//粘贴时格式化代码
"editor.formatOnPaste": true,
//保存时格式化代码
"editor.formatOnSave": true,
//设置字体的大小,最小值能设置为6
"editor.fontSize": 15,
//设置字体的粗细
"editor.fontWeight": "500",
//设置字体的样式
// "terminal.integrated.fontFamily":"Courier New",
//使用Ctrl+滚轮缩放编辑区的字体大小
"editor.mouseWheelZoom": true,
//使用Ctrl+滚轮缩放终端Terminal的字体大小
"terminal.integrated.mouseWheelZoom": true,
//设置为false,这样打开新的文件时,不会自动关闭旧的文件
"workbench.editor.enablePreview": false,
//这2行配置很重要!!!在tasks.json中的任务类型如果是"shell",则这里的shell选择,关系到对应shell命令的使用适配与否。
"terminal.explorerKind": "integrated",
"terminal.integrated.defaultProfile.windows": "Command Prompt", //You can also choose from the following three shells:"Command Prompt" or "PowerShell" or "Windows PowerShell" or "Git Bash"
//warning 1:若想使用makefile.makePath配置,则需安装Makefile Tools插件;
//warning 2:若想使用cmake.generator生成器配置,则需安装CMake和CMake Tools这两个插件
/*
👇
👇
👇
*/
// "makefile.makePath": "E:/embedded_dev_tools/xpack-ninja-build-1.12.1-1/bin/ninja.exe",
// "cmake.generator": "Ninja", // VSCode的CMake插件默认配置生成器为Ninja
//
// "makefile.makePath": "E:/embedded_dev_tools/xpack-windows-build-tools-4.4.1-2/bin/make.exe",
// "cmake.generator": "Unix Makefiles",
"files.associations": {
"stdio.h": "c",
"stdlib.h": "c"
}
}
4.2 c_cpp_properties.json
⭐内容无需修改,开箱即用⭐。
{
"configurations": [
{
"name": "Pico-RP2040_ARM_GCC",
"includePath": [
"${workspaceFolder}/**"
// "${env:PICO_SDK_PATH}/**"
],
"defines": [
"__GNUC__"
],
/*
只要设置了系统环境变量,在此处填写arm-none-eabi-gcc即可。
VSCode C/C++ IntelliSense插件会自动索引arm-none-eabi-gcc.exe所在路径,故无需在此填写完整路径。
*/
"compilerPath": "arm-none-eabi-gcc",
//这一配置在目前所搭建的环境下没用,但是如果你使用的是SDK,库和驱动文件与项目工程不在一个文件夹中,这一步就很有用了,它能让你在当前项目就能向库代码跳转。
"compileCommands": "${workspaceFolder}/build/compile_commands.json",
"cStandard": "gnu17",
"cppStandard": "gnu++14",
"intelliSenseMode": "gcc-arm",
"configurationProvider": "ms-vscode.cmake-tools"
}
],
"version": 4
}
4.3 tasks.json
CMake编译工程分为2个步骤:CMake配置、CMake构建,分别对应下述json脚本的CMake configure任务和CMake build任务。关于该json脚本的命令行编写,各位可以参考Raspberrypi官方的Pico 系列微控制器命令行设置README:https://github.com/raspberrypi/pico-setup。
🍍🍍🍍修改要点如下:
① tasks.json内第135行"interface/jlink-swd.cfg"的jlink-swd.cfg文件来源请参考:OpenOCD之J-Link下载。
{
"version": "2.0.0",
"tasks": [
{
"label": "CMake configure",
"type": "shell",
"command": "cmake", //要执行的命令,前提是已经在系统环境变量PATH中安装了CMake
"args": [
//严格顺序要求:必须按 -S <source> -> -B <build> -> -G <generator> -> [其他选项] 的顺序排列,否则可能导致配置失败或逻辑错误
"-S", //可选,-S <sourceDir>。若未显式指定,CMake 默认从当前工程目录开始查找 CMakeLists.txt。
".", // "."表示指定源代码目录为包含 CMakeLists.txt 的根目录。
"-B", //必选,-B <buildDir>。配置生成Makefile or Ninja脚本及其相关文件的路径, 使得源码和构建过程文件分开,以便更好地管理项目
"./build", //这条命令会告诉 CMake 在工程根目录下创建一个名为 build 的子目录(如果它不存在的话),并在该子目录下生成makefile/build.ninja/rules.ninja等构建文件
"-G", //配置生成器类型
"Ninja", //"Unix Makefiles",
//"-D", //设置构建类型,可选择如下:Debug/Release/RelWithDebInfo/MinSizeRel
//"CMAKE_BUILD_TYPE=Debug",
"-D",
"CMAKE_EXPORT_COMPILE_COMMANDS:BOOL=TRUE", //生成compile_commands.json的文件,该文件是为了让vscode有代码导航、自动补全和语法高亮功能。
// "--debug-output" //显示详细的CMake配置过程信息,可用于调试 CMakeLists.txt 脚本的逻辑问题。
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": "$gcc"
},
{
"label": "CMake build",
"type": "shell", //直接使用shell的手动输入命令行“cmake --build {构建目录的相对路径} 其他可选的配置参数”
"command": "cmake",
"args": [
"--build", //不论后端构建工具是Make or Ninja, 只需调用CMake的统一命令接口"--build", 便能实现在某个文件夹下构建(生成可执行文件),具有跨平台特性。
"${workspaceFolder}/build", //生成可执行文件.elf和进制文件.hex/.bin的路径
"--config Debug",//选项优先级的大小:(构建阶段)--config > (配置阶段)-DCMAKE_BUILD_TYPE
"--target ${workspaceRootFolderName}.elf", //"all",构建整个项目。允许指定单一或多个目标来构建,而不是构建整个项目,这可以显著减少构建时间。
"--parallel 5", //CMake的现代化语法,其功能是并行编译,区别于 CMakeLists.txt 中的多线程功能开关:add_compile_options(-pthread)
// "--verbose" //可简写为 -v,让底层的构建工具(如 Make 或 Ninja)输出详细的构建(编译和链接)过程信息,为CMake通用命令。
],
"group": {
"kind": "build",
"isDefault": true
},
"dependsOn": [
"CMake configure"
],
"problemMatcher": [
"$gcc"
]
},
{
"type": "shell",
"label": "CMake cleanRebuild",
"dependsOrder": "sequence",
"dependsOn": [
"CMake clean",
"CMake build"
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": [
"$gcc"
]
},
{
"label": "CMake clean",
"type": "shell",
// "command": "Remove-Item -Path ./build/* -Recurse",
////powershell(windows10及以上的操作系统)可调用,只删除build目录下的所有文件。
////使用该命令的前提是在settings.json中设置了:
//// "terminal.explorerKind": "integrated",
//// "terminal.integrated.defaultProfile.windows": "PowerShell",
/*
||此为分隔标识,无需反注释
||此为分隔标识,无需反注释
||此为分隔标识,无需反注释
*/
// "command": "rmdir /q /s build",
////cmd(windows操作系统任意版本)可调用,这会直接将build目录本身一起删除。
////使用该命令的前提是在settings.json中设置了:
//// "terminal.explorerKind": "integrated",
//// "terminal.integrated.defaultProfile.windows": "Command Prompt",
/*
||此为分隔标识,无需反注释
||此为分隔标识,无需反注释
||此为分隔标识,无需反注释
*/
"command": "rm -rf ./build/*",
////rm -rf为Linux用法,只删除build目录下的所有文件。
////使用该命令的前提是在settings.json中设置了:
//// "terminal.explorerKind": "integrated",
//// "terminal.integrated.defaultProfile.windows": "Git Bash",
//// 只要安装了像Git Bash的类Unix环境,Windows的cmd终端可以间接调用rm -rf命令,因此也可在settings.json中设置:
//// "terminal.explorerKind": "integrated",
//// "terminal.integrated.defaultProfile.windows": "Command Prompt",
"args": [],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": [
"$gcc"
]
},
{
"label": "flash with CMSIS-DAP-Link",
"type": "shell",
"command": "openocd",
"args": [
"-f",
"interface/cmsis-dap.cfg",
"-f",
"target/rp2040.cfg",
"-c",
"adapter speed 2000",
"-c",
"program build/${workspaceRootFolderName}.elf verify reset exit"
],
"group": "build",
"problemMatcher": [
"$gcc"
],
"dependsOn": [ //任务依赖
"CMake build"
]
},
{
"label": "flash with J-Link",
"type": "shell",
"command": "openocd",
"args": [
"-f",
"interface/jlink-swd.cfg",
"-f",
"target/rp2040.cfg",
"-c",
"adapter speed 1000",
"-c",
"program build/${workspaceRootFolderName}.elf verify reset exit"
],
"group": "build",
"problemMatcher": [
"$gcc"
],
"dependsOn": [ //任务依赖
"CMake build"
]
}
]
}
4.4 launch.json
${env:VAR_NAME}是VSCode的特有语法,作用是动态引用系统环境变量(如 PATH、HOME 或自定义变量)。
在上面的Pico SDK环境变量设置中,笔者已经对Pico SDK中的pico-sdk建立了一个用户变量名:PICO_SDK_PATH,
可以注意到的是,launch.json中svdfile寄存器文件路径设置,是通过动态引用系统环境变量${env:PICO_SDK_PATH}来设置的。
🍍🍍🍍修改要点如下:
① launch.json内第40行"interface/jlink-swd.cfg"的jlink-swd.cfg文件来源请参考:OpenOCD之J-Link下载。
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "Pico-rp2040 Debug with cmsis-dap-link",
"cwd": "${workspaceRoot}",
"executable": "./build/${workspaceRootFolderName}.elf",
"request": "launch",
"type": "cortex-debug",
"servertype": "openocd",
"device": "RP2040",
"configFiles": [
"interface/cmsis-dap.cfg",
"target/rp2040.cfg"
],
"svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd",
"openOCDLaunchCommands": [
"adapter speed 5000"
],
"postRestartCommands": [
"break main",
"continue"
],
"runToEntryPoint": "main",
"showDevDebugOutput": "none",
"preLaunchTask": "flash with CMSIS-DAP-Link" //每次调试之前会先下载程序
},
{
"name": "Pico-rp2040 Debug with j-link",
"cwd": "${workspaceRoot}",
"executable": "./build/${workspaceRootFolderName}.elf",
"request": "launch",
"type": "cortex-debug",
"servertype": "openocd",
"device": "RP2040",
"configFiles": [
"interface/jlink-swd.cfg",
"target/rp2040.cfg"
],
"svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd",
"openOCDLaunchCommands": [
"adapter speed 5000"
],
"postRestartCommands": [
"break main",
"continue"
],
"runToEntryPoint": "main",
"showDevDebugTimestamps": true,
"showDevDebugOutput": "none",
"preLaunchTask": "flash with J-Link" //每次调试之前会先下载程序
}
]
}
五、CMakeLists.txt构建脚本
修改要点:
①
set(PICO_SDK_PATH “D:/Software/embedded_dev_tools/Pico_SDK_v1.5.1/pico-sdk”)
上述双引号中的路径修改为安装Pico_SDK的路径,位于第11行;
②
project(rp2040_blink C CXX ASM)
rp2040_blink为笔者的工程名称,需要将其修改为你自己的工程名称,位于第19行。
③
include_directories(
./USER/Inc
)file(GLOB_RECURSE SOURCES
./USER/Src/*.c
)
include_directories是你工程的头文件相对路径;file是你工程的源文件相对路径,请自行修改,分别位于第57和61行。
CMakeLists.txt:
# Raspberry pi Pico Cmake工程
cmake_minimum_required(VERSION 3.20)
set(CMAKE_SIZE arm-none-eabi-size)
set(CMAKE_C_STANDARD 17)
set(CMAKE_CXX_STANDARD 14)
# 设置pico_sdk
set(PICO_SDK_PATH "D:/Software/embedded_dev_tools/Pico_SDK_v1.5.1/pico-sdk")
# 导入pico_sdk,必须放在工程之前
include(pico_sdk_import.cmake)
# 设置工程,名称可以根据需要设置
# project : 定义工程名称,并可以指定工程可支持的语言,语法格式为 project(项目域名 语言)
# .HEX .bin .elf .map的文件名设置
project(rp2040_blink C CXX ASM)
#设置代码调试等级
set(CMAKE_BUILD_TYPE "Debug")
# +---------------+---------------+--------------+--------------+----------+
# | | | optimization | assert works | stripped |
# +---------------+---------------+--------------+--------------+----------|
# | | None | | | |
# | -g | Debug | no | yes | no |
# |-O3 -DNDEBUG | Release | full | no | yes |
# |-O2 -g -DNDEBUG| RelWithDebInfo| good | no | no |
# |-Os -DNDEBUG | MinSizeRel | size | no | yes |
# +---------------+---------------+--------------+--------------+----------+
# Release 进行优化,提高速度 -排除调试信息
if ("${CMAKE_BUILD_TYPE}" STREQUAL "Release")
message(VERBOSE "Maximum optimization for speed")
add_compile_options(-Ofast)
# RelWithDebInfo 进行优化,提高速度 -包含调试信息
elseif ("${CMAKE_BUILD_TYPE}" STREQUAL "RelWithDebInfo")
message(VERBOSE "Maximum optimization for speed, debug info included")
add_compile_options(-Ofast -g)
# MinSizeRel 优化二进制大小 -排除调试信息
elseif ("${CMAKE_BUILD_TYPE}" STREQUAL "MinSizeRel")
message(VERBOSE "Maximum optimization for size")
add_compile_options(-Os)
# Debug 禁用优化 -包含调试信息
else ()
message(VERBOSE "Minimal optimization, debug info included")
add_compile_options(-Og -g)
endif ()
# 初始化SDK
pico_sdk_init()
#添加头文件路径,即.h文件
include_directories(
./USER/Inc
)
file(GLOB_RECURSE SOURCES
./USER/Src/*.c
)
add_link_options(-Wl,--print-memory-usage -Wl,--gc-sections -flto)
# 添加可执行文件
add_executable(${PROJECT_NAME} ${SOURCES})
#启用多线程支持
#⚠️仅适用于 GCC/Clang 等遵循 POSIX 标准的编译器,对 MSVC 无效(MSVC 通过 <thread> 头文件原生支持)
add_compile_options(-pthread)
# 设置工程信息
pico_set_program_name(${PROJECT_NAME} "${PROJECT_NAME}")
pico_set_program_version(${PROJECT_NAME} "0.1")
# 默认打开串口
pico_enable_stdio_uart(${PROJECT_NAME} 0)# 是否将串口数据的标准输入输出(stdin和stdout)重定向到UART
pico_enable_stdio_usb(${PROJECT_NAME} 1)# 是否将串口数据的标准输入输出(stdin和stdout)重定向到USB CDC
# 添加链接标准库
target_link_libraries(${PROJECT_NAME} pico_stdlib)
# Print executable size
add_custom_command(TARGET "${PROJECT_NAME}" POST_BUILD
# COMMENT "Invoking: Cross ARM GNU Print Size"
COMMAND ${CMAKE_SIZE} ${PROJECT_NAME}.elf
)
# 除 ELF 文件外, 生成 map/bin/hex/uf2 文件
pico_add_extra_outputs(${PROJECT_NAME})
六、编译、下载、调试
我们依照下述的流程顺序走一遍:
6.1 编译
编译过程包括了CMake配置、CMake构建,具体的命令行行为请各位读者参考
tasks.json脚本文件。
在tasks.json中,和编译强相关的4个label标签:CMake configure、CMake build、CMake cleanRebuild、CMake clean。
编译操作:按下快捷键 ctrl+shift+B ,调出任务列表,再选择点击CMake build标签,即可成功编译,如下图所示。


6.2 下载
关于下载,具体的命令行行为请各位读者参考
tasks.json脚本文件。
在tasks.json中,和下载强相关的2个label标签:flash with CMSIS-DAP-Link、flash with J-Link。
下载操作:点击VSCode导航栏的 终端,然后点击 运行任务,再选择点击flash with CMSIS-DAP-Link标签,即可成功下载,如下图所示。



6.3 调试
关于调试,具体的命令行行为请各位读者参考
launch.json脚本文件。
在launch.json中,和调试强相关的2个name名字:Pico-rp2040 Debug with cmsis-dap-link、Pico-rp2040 Debug with j-link。
下载操作:点击VSCode左侧的 调试 按钮,然后选择Pico-rp2040 Debug with cmsis-dap-link,即可进入调试模式,如下图所示。


七、可能会遇到的问题
7.1 cmsis-dap-link方式下载
用的下载器不支持rp2040该款MCU,笔者一开始用的下图这款的PWLINK2 Lite,询问技术人员发现不支持rp2040。

后面笔者换到了下图这款WCH沁恒的WCH-LinkE,其适用于调试和下载带有SWD/JTAG接口的ARM芯片,rp2040为双核 ARM Cortex-M0 + 的MCU,因此可用于rp2040程序的下载。

7.2 修改openocd烧录的目标文件rp2040.cfg
参考这篇文章:合宙RP2040开发板在Windows上使用C++技术栈的调试
7.3 J-Link下载问题
或许各位会注意到tasks.json和launch.json内的 interface/jlink-swd.cfg 文件配置,请参考该篇文章修改:OpenOCD之J-Link下载。
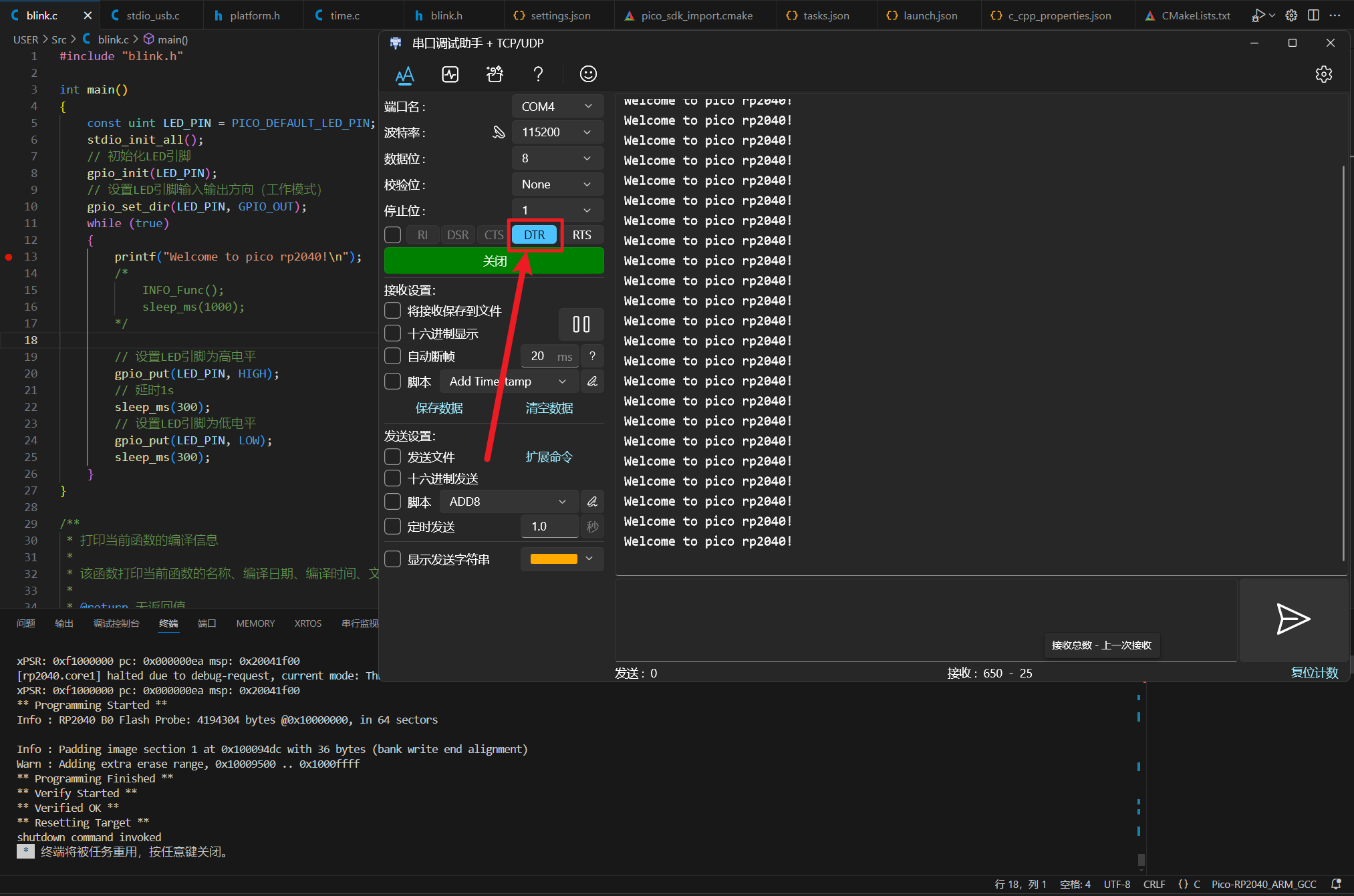
7.4 串口打印问题
请参考该篇文章:树莓派 Pico Pi USB串口通信。
要勾选上串口调试工具的DTR选项,才可以进行正常的USB转串口打印,如下图所示:


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









