




#还是搬砖运动员的我在2022年3月份至5月份期间,花了3个月的业余时间完成了这个项目,以纪念上海市闵行区的封城经历。
第一章:系统概述与设计目标
1.1 系统背景与意义
随着农业生产的现代化与智能化,禽畜养殖行业正在逐步从传统人工管理转向智能化、自动化管理。传统的养殖管理模式存在着诸多问题,例如环境数据采集不及时、人工干预较多、管理效率低等。这些问题不仅影响养殖效益,还可能对禽畜的生长环境与健康造成不利影响。因此,亟需一种高效、可靠且便捷的智能监控系统来改善这一现状。
本系统基于STM32微控制器平台,采用多种传感器与执行设备的集成,旨在实现对禽畜养殖场环境的实时监控和自动化控制。系统通过自动采集环境数据、对温湿度、空气质量、水位等关键参数进行实时监测,并根据数据变化自动调节通风、供水和喂食设备,从而保证养殖场内的禽畜生活环境始终处于最佳状态。
1.2 系统设计目标
本系统设计的目标是为养殖场提供一种低成本、高效的环境监控与自动管理方案。具体目标如下:
-
环境数据实时监控:通过多个传感器实时监测养殖场的温湿度、光照、空气质量等关键参数,为养殖场主提供及时、准确的数据支持。
-
自动化控制:根据采集的数据,系统能够自动调节温湿度、通风、供水等设备,确保养殖环境处于最佳状态。
-
报警与预警功能:系统能够实时监测有害气体(如一氧化碳、烟雾、酒精等)的浓度,及时触发报警,并通知养殖场主,避免潜在危险。
-
远程监控与控制:系统集成Wi-Fi模块,通过云平台实现远程监控与控制,养殖场主可以随时查看环境数据,接收报警信息,并通过手机APP或Web端远程控制设备。
-
易于扩展与维护:系统设计考虑到模块化和可扩展性,方便未来对系统的功能拓展与硬件升级。
1.3 系统功能需求
在进行系统设计时,首先需要明确系统的核心功能需求,确保每个功能模块的设计都能高效支持系统目标的实现。系统的主要功能需求包括:
-
环境监测:
-
温湿度监测:通过DHT11温湿度传感器监测养殖场的环境温湿度,并根据设定的阈值值启动自动调节设备(如加热、通风)。
-
水位监测:通过液位传感器实时监测饮水槽的水位,当水位低于设定值时,自动控制补水系统。
-
光照监测:使用光照传感器(如GY302)监测养殖场内的光照强度,以确保充足的照明,避免影响禽畜的生长。
-
空气质量监测:通过SGP30空气质量传感器检测CO₂浓度及TVOC浓度,实时评估环境空气质量,防止空气污染对禽畜的健康造成影响。
-
-
设备控制:
-
自动供水:根据水位传感器反馈的水位数据,自动控制水阀进行补水,保证饮水槽内水源的稳定供应。
-
自动喂食:通过定时喂食器与继电器控制的方式,定时喂养禽畜,减少人工干预,提高养殖管理效率。
-
通风控制:根据温湿度传感器的采集数据,自动调节风扇或排气设备的工作状态,维持养殖环境的适宜温湿度。
-
报警与紧急预警:系统通过MQ系列气体传感器实时监控空气中的有害气体(如烟雾、一氧化碳等),一旦检测到浓度超过安全阈值,立即启动报警系统,并通过Wi-Fi模块将警报信息发送至养殖场主。
-
-
远程监控与管理:
-
数据上传与云平台接入:通过ESP8266 Wi-Fi模块将采集到的环境数据实时上传到机智云平台,确保养殖场主能够随时查看和管理养殖场的数据。
-
远程控制:通过云平台,用户可以随时进行设备控制(如远程开关水阀、风扇、喂食器等),即使不在养殖场,也能轻松管理环境。
-
-
报警与通知功能:
-
系统一旦发现环境参数异常(如温湿度过高或过低、水位过低、空气质量不良等),将自动触发报警。
-
通过蜂鸣器、LED指示灯和Wi-Fi模块将报警信息传送给养殖场主,确保养殖场主能够在第一时间采取措施。
-
1.4 系统整体架构
本系统的整体架构如图1所示。
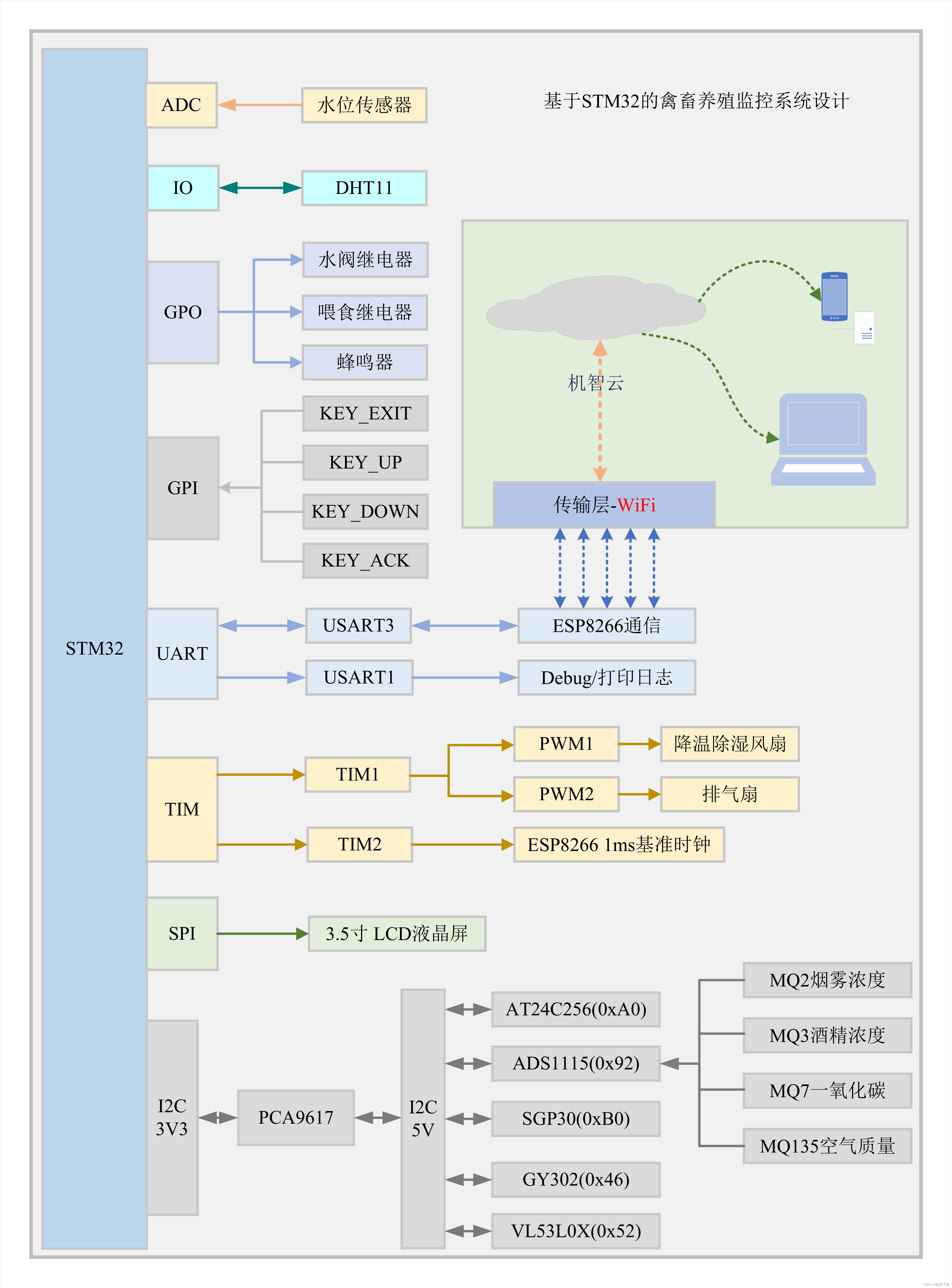
系统架构主要分为三个部分:
-
云平台部分:通过ESP8266模块,系统将采集的数据上传至机智云平台,提供远程监控和控制功能。云平台可以实时展示养殖场的环境数据,并提供设备控制功能,允许用户通过手机APP或Web端进行操作。
-
STM32核心控制板:作为系统的核心部分,STM32微控制器负责与各传感器和设备的通信与控制,包括数据采集、处理与执行控制指令。
-
传感器与执行设备:这部分包括多种传感器(如温湿度传感器、液位传感器、气体传感器等)以及执行设备(如水阀、风扇、喂食器、报警设备等)。这些设备与STM32控制板进行数据交换,完成监控与自动控制任务。
1.5 设计挑战与解决方案
在设计该系统时,面临了以下几个挑战:
-
多传感器数据同步与处理:系统集成了多种传感器,这些传感器的数据采集需要实时同步且高效处理。通过STM32的定时器与中断机制,确保各传感器数据的采集时间一致性,并采用合适的滤波算法处理数据,去除噪声,保证数据的准确性。
-
电源管理:在长时间运行中,传感器和执行设备需要稳定的电源供应。系统采用低功耗的STM32微控制器,并对各模块进行电源管理,确保系统稳定运行。
-
远程通信稳定性:为了确保远程监控和控制的稳定性,系统通过Wi-Fi模块与云平台进行通信。对通信协议进行了优化,并且对异常情况进行预警,确保数据传输不受影响。
1.6 小结
本章介绍了基于STM32的禽畜养殖监控系统的背景、设计目标与功能需求,并简要说明了系统架构和设计挑战。系统的核心目标是通过智能化的环境监控与自动化控制,提高养殖效率,降低管理成本,保障养殖场环境的安全与稳定。在后续章节中,将详细讨论硬件设计、软件设计及系统的实现与测试过程。
第二章:硬件设计详解
本章将详细介绍基于STM32的禽畜养殖监控系统的硬件设计,包括系统的各个硬件模块及其工作原理。这些模块共同协作,完成系统的环境监测、自动控制、数据传输和人机交互等功能。硬件设计涵盖了电源设计、传感器选择与配置、执行器控制及显示接口等多个方面。
2.1 硬件设计环境
本系统的硬件设计环境基于STM32微控制器。STM32是STMicroelectronics公司推出的一系列高性能、低功耗的32位微控制器,适用于各种嵌入式应用。为确保系统的稳定性与扩展性,选择了STM32F103系列微控制器作为核心控制单元。
硬件设计环境包括:
-
开发工具:Keil uVision5用于编写固件,STM32CubeMX用于配置外设、时钟和中断。
-
电路设计工具:Altium Designer用于绘制原理图和PCB设计。
-
调试工具:ST-Link调试器用于固件调试与烧录、USB-TTL串口调试工具。
2.2 电源部分
系统的电源设计至关重要,稳定的电源供应是确保各个硬件模块正常工作的基础。系统主要由以下部分组成:
-
电源输入:外部12V DC电源输入。
-
电源管理芯片:采用DC-DC降压模块,将12V输入电压降至3.3V,提供给STM32微控制器和其他3.3V工作电压的模块,如Wi-Fi模块和传感器。
-
稳压输出:使用LDO为高精度传感器(如ADS1115)提供稳定的电压。
这种电源设计具有高效能、低噪声和低发热的特点,确保各个模块在不同负载下稳定运行。
2.3 MCU最小系统
STM32F103系列微控制器作为本系统的核心,负责所有数据采集、处理和控制操作。使用了MCU的最小系统,包含以下关键部分:
-
STM32F103C8T6微控制器:采用LQFP-48封装,具有64KB的闪存和20KB的SRAM。
-
外部晶振:提供外部8MHz晶振,以确保MCU的时钟稳定。
-
电源滤波电容:对电源进行滤波,减少电压波动对系统的影响。
-
复位电路:确保MCU在上电或异常断电后正确复位。
-
调试接口:包括SWD调试接口,用于程序下载和调试。
该最小系统结构紧凑、功能完备,为后续的外设扩展提供了基础。
2.4 空气质量传感器
空气质量传感器用于监测养殖场内的空气质量,特别是CO₂浓度和TVOC(总挥发性有机物)浓度。本系统选择了SGP30传感器,其特点包括:
-
测量气体:CO₂和TVOC。
-
输出接口:I2C通信接口,方便与STM32连接。
-
高精度:SGP30具有良好的稳定性和准确性,适合长期监测。
SGP30传感器能够实时监测养殖环境的空气质量,帮助及时发现空气污染问题,提高禽畜的健康生长环境。
2.5 光照强度传感器
养殖场内的光照强度对禽畜的生长有重要影响。本系统采用了**GY302光照传感器(BH1750)**来实时监测光照强度。
-
测量范围:0至65535 lux(适合大部分光照监测场景)。
-
通信接口:I2C接口,方便与STM32进行数据交互。
-
精度与稳定性:BH1750传感器具有高精度、低功耗的特点,适合长期使用。
该传感器能够提供实时的光照强度数据,帮助系统调节养殖环境中的光照条件,确保禽畜有足够的光照以促进健康生长。
2.6 气体浓度传感器
为了确保养殖场内没有有害气体泄漏,本系统使用了MQ系列气体传感器来检测烟雾、酒精、一氧化碳等气体。
-
MQ2、MQ3、MQ7、MQ135:分别用于检测烟雾、酒精、一氧化碳和空气质量(如CO₂、NH₃等气体)。
-
模拟输出:这些传感器的输出是模拟信号,STM32通过ADC进行采样处理。
通过这些传感器,使系统能够在环境中检测到有害气体,并在检测到有害气体浓度过高时触发报警,确保养殖场的安全。
2.7 温湿度传感器
温湿度是影响禽畜健康的关键因素之一。本系统采用了DHT11温湿度传感器,它具有以下特点:
-
测量范围:温度-20℃到50℃,湿度20%到90% RH。
-
输出方式:数字信号,通过单总线(One-Wire)协议与STM32进行数据交换。
-
响应时间:DHT11具有较短的响应时间,适合实时环境监控。
该传感器提供的温湿度数据将用于控制养殖场内的温湿度调节设备,如风扇和加热器。
2.8 激光测距传感器
为了监测料槽中的剩余料量或其他特定的物理距离,系统采用了VL53L0X激光测距传感器。
-
测量范围:从30mm到2米,适用于短距离测量。
-
通信接口:I2C接口,便于与STM32连接。
-
精度与稳定性:该传感器具有较高的精度和较长的测量距离,适用于实时距离监测。
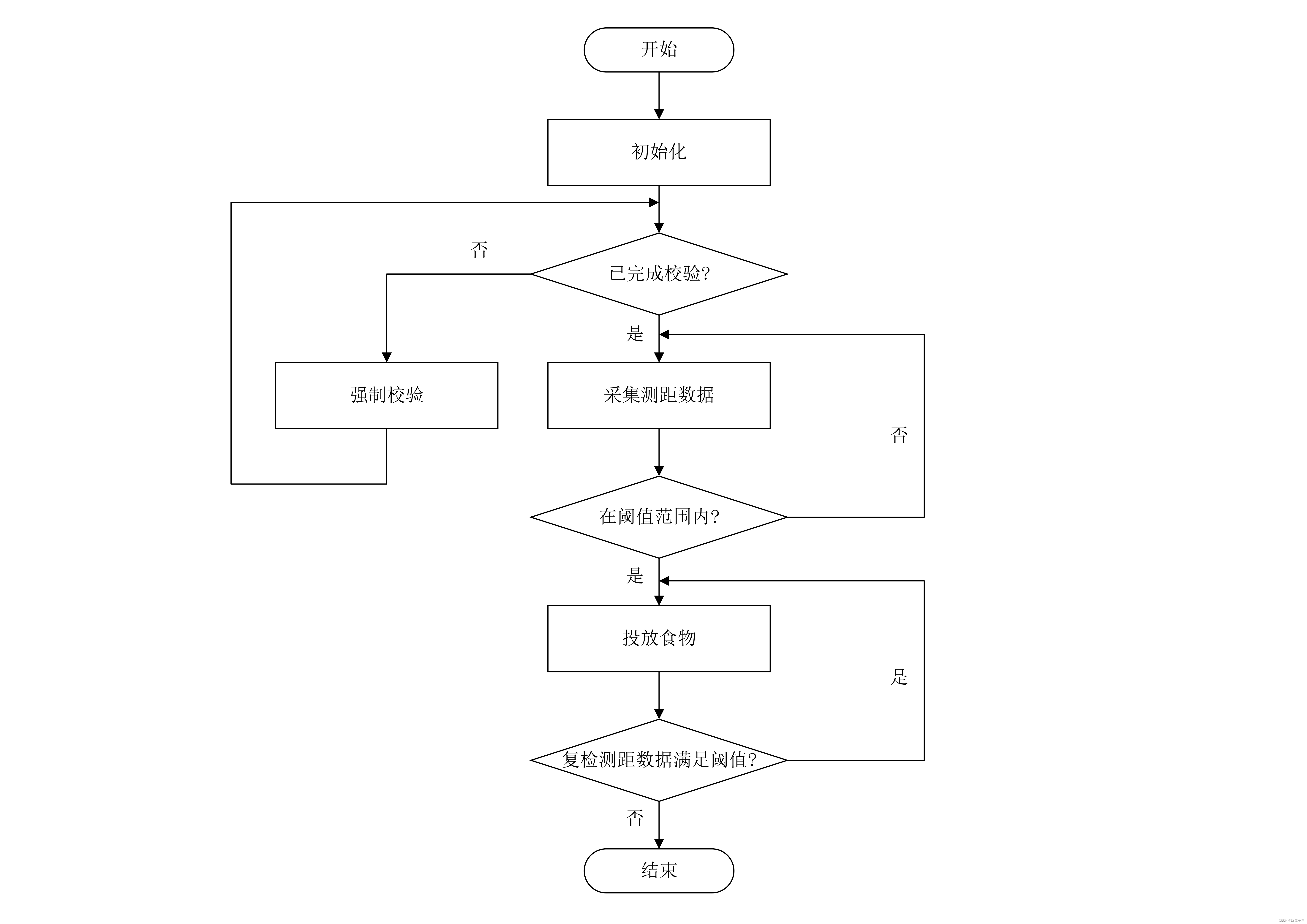
通过激光测距传感器,系统可以监控料槽的剩余料量,自动判断是否需要补充饲料。
2.9 水位传感器
水位传感器用于实时监测饮水槽的水位,确保养殖场中的水源充足。本系统采用了电容式液位传感器,其工作原理如下:
-
检测原理:通过检测液体的电容变化来判断水位的高低。
-
接口方式:模拟输出,STM32通过ADC进行采样。
-
稳定性与可靠性:该液位传感器具有较好的稳定性和长寿命,适合长期使用。
该传感器将帮助系统实时监控饮水槽水位,触发自动补水功能。
2.10 输出控制继电器
继电器模块用于控制水阀、喂食器、风扇等执行器的开关。本系统选用了5V继电器模块,其特点包括:
-
控制电压:通过STM32的GPIO输出控制继电器的开关。
-
触点容量:支持AC 250V / 10A和DC 30V / 10A的负载。
-
控制方式:通过继电器的NO(常开)触点进行开关控制。
继电器的输出控制将确保系统能够自动调节养殖环境中的各类设备,保证自动化管理的顺利进行。
2.11 PWM输出
PWM信号用于控制设备的转速和亮度等。例如,控制风扇转速和加热器的功率。STM32通过TIM定时器生成PWM信号,精确调节输出。
-
PWM频率:由TIM定时器配置,具有高精度。
-
应用场景:调节风扇的转速,控制风量以调节养殖环境的温湿度。
PWM输出为设备提供了灵活的控制方式,有助于精确调节养殖环境。
2.12 WiFi模块
为了实现远程监控和控制,系统采用了ESP8266 Wi-Fi模块。该模块支持TCP/IP协议,能够与云平台进行数据通信。
-
工作方式:作为Wi-Fi客户端连接到路由器,实时上传数据到云平台。
-
通信协议:通过AT命令或串口协议与STM32进行通信。
通过ESP8266模块,养殖场主可以通过手机APP或Web端实时监控和控制养殖场设备。
2.13 按键输入
本系统设计了多个按键(KEY_UP, KEY_DOWN, KEY_ACK, KEY_EXIT),用于实现用户交互。
-
功能:用户可以通过按键输入设置阈值、调整参数、确认操作或退出设置模式。
-
硬件实现:按键通过GPIO输入,与STM32进行数据交互,完成人机界面的功能。
2.14 TFT-LCD显示
为了直观显示养殖场环境数据,系统采用了3.5寸TFT-LCD显示屏。
-
分辨率:320x240像素。
-
接口方式:使用SPI接口与STM32连接,显示实时数据、系统状态和报警信息。
-
显示内容:实时监控数据、报警信息、图形化显示等。
LCD显示屏使得用户能够随时查看养殖场环境的详细信息。
2.15 调试接口
系统提供了SWD接口,便于开发人员进行固件调试。调试功能:通过J-Link或ST-Link调试器,进行程序的烧录、调试和单步执行等操作。该接口为开发人员提供了方便的调试工具,帮助加速开发进程。
第三章:软件设计与实现
本章将详细介绍基于STM32的禽畜养殖监控系统的软件设计与实现。软件部分的设计包括数据采集、处理与控制、通信协议、用户界面设计以及远程管理功能的实现。本系统采用C语言开发,并使用Keil uVision5和STM32CubeMX进行编程与配置。
3.1 系统软件架构
本系统的软件架构主要分为三个层次:
-
硬件抽象层(HAL):该层负责将硬件接口抽象为标准函数,使得上层应用程序能够便捷地访问和控制硬件资源。包括I/O口操作、ADC采样、PWM输出等基本硬件功能的实现。
-
中间层(Middleware):该层主要负责数据的采集与处理,包括传感器数据的读取、数据滤波与处理、控制逻辑的实现等。
-
应用层:该层包括所有的功能模块,如报警与通知、远程控制、LCD显示、Wi-Fi通信等。通过该层,系统能够实现用户交互、远程监控和控制、报警等功能。
3.2 数据采集与处理
在硬件设计中,通过STM32的各类外设接口(ADC、I2C、SPI、UART等)实现对传感器的接入,并通过中间层软件模块实现对这些传感器数据的采集与处理。数据采集与处理的流程如下:
-
传感器数据采集:
-
温湿度数据:通过DHT11温湿度传感器进行采集,使用单总线协议(One-Wire)读取温湿度值。
//复位DHT11 void DHT11_Rst(void) { DHT11_IO_OUT(); DHT11_DATA_OUT(0); delay_ms(20); DHT11_DATA_OUT(1); delay_us(30); } //等待DHT11的回应 uint8_t DHT11_Check(void) { uint8_t retry=0; DHT11_IO_IN(); while (DHT11_DATA_IN()&&retry<100)//DHT11会拉低40~80us { retry++; delay_us(1); }; if(retry>=100) return 0; else retry=1; while (!DHT11_DATA_IN()&&retry<100) { retry++; delay_us(1); }; if(retry>=100) return 0; return 1; } //从DHT11读取一个bit位 uint8_t DHT11_Read_Bit(void) { uint8_t retry=0; while(DHT11_DATA_IN()&&retry<100) { retry++; delay_us(1); } retry=0; while(!DHT11_DATA_IN()&&retry<100) { retry++; delay_us(1); } delay_us(40); if(DHT11_DATA_IN())return 1; else return 0; } //从DHT11读取一个字节 uint8_t DHT11_Read_Byte(void) { uint8_t i,dat; dat=0; for (i=0;i<8;i++) { dat<<=1; dat|=DHT11_Read_Bit(); } return dat; } //从DHT11读取一次数据 uint8_t DHT11_Read_Data(uint16_t *temp,uint16_t *humi) { uint8_t start=1; uint8_t buf[5]; uint8_t i; DHT11_Rst(); if(DHT11_Check()==1) { for(i=0;i<5;i++) { buf[i]=DHT11_Read_Byte(); } if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4]) { *humi=buf[0]; *temp=buf[2]; start = 0; } }else start = 1; return start; } //初始化DHT11的IO口 DQ 同时检测DHT11的存在 uint8_t DHT11_Init(void) { __HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟 GPIO_InitTypeDef GPIO_Initure; GPIO_Initure.Pin =GPIO_PIN_12; //PA12 GPIO_Initure.Mode =GPIO_MODE_OUTPUT_PP; //推挽输出 GPIO_Initure.Pull =GPIO_PULLUP; //上拉 GPIO_Initure.Speed =GPIO_SPEED_FREQ_HIGH; //高速 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化 DHT11_Rst(); return DHT11_Check(); } -
空气质量数据:通过SGP30传感器获取CO₂和TVOC数据,使用I2C通信协议读取传感器输出的数值。
//初始化IIC接口 uint8_t SGP30_Init(void) { STM_I2C_Init(); uint32_t sgp32_initial; uint16_t co2_initial; uint16_t tvoc_iniaial; if(STM_Write_I2C(SGP30_write_addr,0x20,0x03)) { delay_ms(100); if(STM_Write_I2C(SGP30_write_addr,0x20,0x08)) { delay_ms(100); sgp32_initial = SGP30_Read(SGP30_read_addr); //读取SGP30的值 co2_initial = (sgp32_initial & 0xffff0000) >> 16; tvoc_iniaial = sgp32_initial & 0x0000ffff; while(co2_initial == 400 && tvoc_iniaial == 0) { STM_Write_I2C(SGP30_write_addr,0x20,0x08); delay_ms(100); sgp32_initial = SGP30_Read(SGP30_read_addr); //读取SGP30的值 co2_initial = (sgp32_initial & 0xffff0000) >> 16; //取出CO2浓度值 tvoc_iniaial = sgp32_initial & 0x0000ffff; //取出TVOC值 } return 1; } else return 0; } else return 0; } // 读取SGP30特定地址的数据 uint32_t SGP30_Read(uint8_t device_addr) { uint32_t dat; uint8_t crc; STM_I2C_START(); STM_Write_Byte(device_addr); STM_I2C_Wait_Ack(); dat = STM_Read_Byte(1); dat <<= 8; dat += STM_Read_Byte(1); crc = STM_Read_Byte(1); crc = crc; dat <<= 8; dat += STM_Read_Byte(1); dat <<= 8; dat += STM_Read_Byte(0); STM_I2C_STOP(); return(dat); } //获取二氧化碳浓度 uint16_t GET_SGP30_NUM(void) { STM_Write_I2C(SGP30_write_addr,0x20,0x08); delay_ms(10); return (((SGP30_Read(SGP30_read_addr)) & 0xFFFF0000) >> 16); } -
水位数据:通过电容式液位传感器获取水位变化信息,STM32通过ADC接口进行模拟信号采样并转换为数字信号。
/****************************************************************************/ //函 数 名: MY_ADC_Init() //函数功能: ADC的初始化 //输入参值: 无 //返 回 值: 无 //函数说明: 通道值 0~16取值范围为:ADC_CHANNEL_0~ADC_CHANNEL_16 /****************************************************************************/ void MY_ADC_Init(void) { ADC1_Handler.Instance=ADC1; ADC1_Handler.Init.DataAlign=ADC_DATAALIGN_RIGHT; ADC1_Handler.Init.ScanConvMode=DISABLE; ADC1_Handler.Init.ContinuousConvMode=DISABLE; ADC1_Handler.Init.NbrOfConversion=1; ADC1_Handler.Init.DiscontinuousConvMode=DISABLE; ADC1_Handler.Init.NbrOfDiscConversion=0; ADC1_Handler.Init.ExternalTrigConv=ADC_SOFTWARE_START; HAL_ADC_Init(&ADC1_Handler); } /****************************************************************************/ //函 数 名: HAL_ADC_MspInit() //函数功能: ADC初始化回调函数 //输入参值: hadc:ADC句柄 //返 回 值: 无 //函数说明: 此函数会被HAL_ADC_Init()调用,底层驱动,引脚配置,时钟使能 /****************************************************************************/ void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc) { GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_ADC1_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_Initure.Pin = GPIO_PIN_1; GPIO_Initure.Mode = GPIO_MODE_ANALOG; GPIO_Initure.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOA,&GPIO_Initure); } /****************************************************************************/ //函 数 名: Get_Adc() //函数功能: 获得ADC值 //输入参值: ch: 通道值 0~16,取值范围为:ADC_CHANNEL_0~ADC_CHANNEL_16 //返 回 值: 转换结果 /****************************************************************************/ uint16_t Get_Adc(uint32_t ch) { ADC_ChannelConfTypeDef ADC1_ChanConf; ADC1_ChanConf.Channel=ch; ADC1_ChanConf.Rank=1; ADC1_ChanConf.SamplingTime=ADC_SAMPLETIME_144CYCLES; HAL_ADC_ConfigChannel(&ADC1_Handler,&ADC1_ChanConf); HAL_ADC_Start(&ADC1_Handler); HAL_ADC_PollForConversion(&ADC1_Handler,10); return (uint16_t)HAL_ADC_GetValue(&ADC1_Handler); } /****************************************************************************/ //函 数 名: Get_Adc_Average() //函数功能: 获取采样平均值 //输入参值: times ——> (获取次数) // ch ——> (通道数) //返 回 值: 通道ch的times次转换结果平均值 //函数说明: 获取指定通道的转换值,取times次,然后平均值 /****************************************************************************/ uint16_t Get_Adc_Average(uint32_t ch,uint8_t times) { uint64_t temp_val=0; uint8_t t; for(t=0;t<times;t++) { temp_val+=Get_Adc(ch); delay_ms(5); } return temp_val/times; } /****************************************************************************/ //函 数 名: Water_level_checkout() //函数功能: ADC极值校验 //输入参值: address:保存的首地址 //返 回 值: 1:校验成功 // 0:失败 //函数说明: 分别将传感器置于两种极限状态中,获取ADC的值,并保存在ROM中 /****************************************************************************/ uint8_t Water_level_checkout(uint16_t address) { uint16_t adc_num=0; adc_num = Get_Adc_Average(ADC_CHANNEL_1,30); delay_ms(10); AT24CXX_WriteLenByte(address,adc_num,2); delay_ms(10); if(adc_num == AT24CXX_ReadLenByte(address,2)) return 1; else return 0; } -
气体浓度数据:通过MQ系列传感器检测一氧化碳、酒精、烟雾等气体的浓度,使用模拟输出通过ADS1115进行读取。
/****************************************************************************/ //函 数 名: ADS1115_Init() //函数功能: ADS1115初始化 //输入参值: 无 //返 回 值: 1:pass // 0:fail //函数说明: /****************************************************************************/ uint8_t ADS1115_Init(void) { STM_I2C_Init(); STM_I2C_START(); STM_Write_Byte(ADS1115_WRITE_ADDRESS); if(STM_I2C_Wait_Ack()) { STM_I2C_STOP(); return 1; } else { STM_I2C_STOP(); return 0; } } /****************************************************************************/ //函 数 名: ads1115_config_register() //函数功能: 写入数据到I2C (配置ADS1115时,调用此函数) //输入参值: pointADDR ---> 配置寄存器 // configH ---> 写入配置寄存器高八位 // configL ---> 写入配置寄存器低八位 //返 回 值: 1:config register error ; // 0:config register pass //函数说明: 配置寄存器(P[1:0] = 0x01) [reset = 8583h] // 16位配置寄存器用于控制工作模式,输入选择,数据速率,满量程范围和比较器模式。 /****************************************************************************/ void ads1115_config_register(uint8_t pointADDR,uint8_t configH,uint8_t configL) { STM_I2C_START(); STM_Write_Byte(ADS1115_WRITE_ADDRESS); STM_I2C_Wait_Ack(); STM_Write_Byte(pointADDR); STM_I2C_Wait_Ack(); STM_Write_Byte(configH); STM_I2C_Wait_Ack(); STM_Write_Byte(configL); STM_I2C_Wait_Ack(); STM_I2C_STOP(); } /****************************************************************************/ //函 数 名: ads1115_read_data() //函数功能: 从I2C读取数据(读数据时,调用此函数) //输入参值: // R_ack ---> 是否产生应答信号ACK(1-->YES;0-->NO) //返 回 值: data ---> 读取的数据 //函数说明: 转换寄存器(P[1:0] = 0x00) [reset = 0x0000] (只读)。 // 16位转换寄存器包含二进制二进制补码格式的最后一次转换结果。 // 上电后,转换寄存器清除为0,并保持0直到第一次转换完成 /****************************************************************************/ uint16_t ads1115_read_data(uint8_t R_ack) { uint16_t data; uint8_t rx_data[2]={0x00,0x00}; STM_I2C_START(); STM_Write_Byte(ADS1115_WRITE_ADDRESS); STM_I2C_Wait_Ack(); STM_Write_Byte(0x00); STM_I2C_Wait_Ack(); STM_I2C_STOP(); delay_ms(10); STM_I2C_START(); STM_Write_Byte(ADS1115_READ_ADDRESS); STM_I2C_Wait_Ack(); rx_data[1] = STM_Read_Byte(1); STM_I2C_Wait_Ack(); rx_data[0] = STM_Read_Byte(R_ack); STM_I2C_STOP(); delay_ms(1); data=(rx_data[1]<<8) | rx_data[0]; return data; } /****************************************************************************/ //函 数 名: ads1115_config_register() //函数功能: 写入数据到I2C (配置ADS1115时,调用此函数) //输入参值: pointADD ---> 配置寄存器 // configH ---> 写入配置寄存器高八位 // configL ---> 写入配置寄存器低八位 //返 回 值: 转换后的数字量 //函数说明: 配置寄存器(P[1:0] = 0x01) [reset = 8583h] // 16位配置寄存器用于控制工作模式,输入选择,数据速率,满量程范围和比较器模式。 /****************************************************************************/ double ads1115_get_voltage_val(uint8_t pointADD,uint8_t configH,uint8_t configL) { double val; uint16_t ad_val; ads1115_config_register(pointADD,configH,configL); delay_ms(50); ad_val=ads1115_read_data(0); if((ad_val>=0x8000)&&(ad_val<=0xFFFF)) ad_val=0xFFFF-ad_val; if((ad_val==0x7FFF)|(ad_val==0X8000))//是否超量程了 { ad_val=0; printf("over PGA\r\n"); } switch((0x0E&configH)>>1)//量程对应的分辨率 { case(0x00): //4.096*2*ad_val/65535; val=(double)ad_val*187.5/1000000.0;// break; case(0x01): val=(double) ad_val*125/1000000.0; //;4.096*2*ad_val/65535; break; case(0x02): val=(double)ad_val*62.5/1000000.0; break; case(0x03): val=(double)ad_val*31.25/1000000.0; break; case(0x04): val=(double)ad_val*15.625/1000000.0; break; case(0x05): val=(double)ad_val*7.8125/1000000.0; break; } return val; } /****************************************************************************/ //函 数 名: ADS_AIN0_4_polling_mode() //函数功能: 轮询读取通道0~3的数据并返回转换后的值 //输入参值: adc_scan ---> 轮询扫面输入值(Channel 0~3) //返 回 值: 转换后的数字量 //函数说明: 软件滤波 /****************************************************************************/ double ADS_AIN0_4_polling_mode(uint8_t adc_scan) { double ADC_Value=0.0; uint8_t i; double adc_summation=0; switch(adc_scan) { case ADS_Channel_0: { for(i=0;i<2;i++) { adc_summation = adc_summation + ads1115_get_voltage_val(0x01,CONFIG0_REG_H,CONFIG0_REG_L); //Channel 0 } }break; case ADS_Channel_1: { for(i=0;i<2;i++) { adc_summation = adc_summation + ads1115_get_voltage_val(0x01,CONFIG1_REG_H,CONFIG1_REG_L); //Channel 1 } }break; case ADS_Channel_2: { for(i=0;i<2;i++) { adc_summation = adc_summation + ads1115_get_voltage_val(0x01,CONFIG2_REG_H,CONFIG2_REG_L); //Channel 2 } }break; case ADS_Channel_3: { for(i=0;i<2;i++) { adc_summation = adc_summation + ads1115_get_voltage_val(0x01,CONFIG3_REG_H,CONFIG3_REG_L); //Channel 3 } }break; default: adc_summation = 0; break; } ADC_Value= adc_summation / 2; return ADC_Value; } -
光照强度数据:通过BH1750光照传感器测量环境光照强度,使用I2C接口读取数据。
/****************************************************************************/ //函 数 名: GY302_Init() //函数功能: GY302初始化 //输入参值: null //返 回 值: 1:写入成功 // 0:写入失败 //函数说明: /****************************************************************************/ uint8_t GY302_Init(void) { STM_I2C_Init(); delay_ms(120); GY302_Power_ON(); GY302_RESET(); if(GY302_Write_I2C(GY302_WRITE_ADDR,Measure_Mode)) return 1; else return 0; } /****************************************************************************/ //函 数 名: GY302_Write_I2C() //函数功能: 写入数据到I2C (写数据时,调用此函数) //输入参值: device ---> 写入设备 // dat ---> 写入数据 //返 回 值: 1:写入成功 // 0:写入失败 //函数说明: /****************************************************************************/ uint8_t GY302_Write_I2C(uint8_t device,uint8_t dat) //写入数据到I2C { STM_I2C_START(); STM_Write_Byte(device); if(STM_I2C_Wait_Ack()) { STM_Write_Byte(dat); if(STM_I2C_Wait_Ack()) { STM_I2C_STOP(); return 1; } else return 0; } else return 0; } /****************************************************************************/ //函 数 名: GY302_Read_I2C() //函数功能: 从I2C读取数据(读数据时,调用此函数) //输入参值: device ---> 设备地址 //返 回 值: dat ---> 读取的数据 //函数说明: /****************************************************************************/ uint8_t GY302_Read_I2C(uint8_t device) { uint8_t dat; STM_I2C_START(); STM_Write_Byte(device+0x01); STM_I2C_Wait_Ack(); dat=STM_Read_Byte(1); STM_I2C_Wait_Ack(); dat=(dat<<8)+STM_Read_Byte(0); STM_I2C_STOP(); return dat; } //GY302s上电 void GY302_Power_ON(void) { GY302_Write_I2C(GY302_WRITE_ADDR,POWER_ON); } //GY302s断电 void GY302_Power_OFF(void) { GY302_Write_I2C(GY302_WRITE_ADDR,POWER_OFF); } //GY302复位 仅在上电时有效 void GY302_RESET(void) { GY302_Write_I2C(GY302_WRITE_ADDR,MODULE_RESET); } //获取光照强度 float LIght_Intensity(void) { return (float)(GY302_Read_I2C(GY302_WRITE_ADDR)/1.2f); } -
激光测距数据:通过VL53L0X激光测距传感器测量物体的距离,使用I2C协议获取距离数据(此功能代码较多,俺就不占用篇幅了)。
-
-
数据滤波与处理:
-
温湿度数据滤波:由于传感器可能受到环境噪声的干扰,采集到的数据会经过简单的滤波算法(如移动平均滤波)进行平滑处理。
-
气体传感器数据:使用一定的延时和数据平均方法去除瞬时噪声,并设置阈值进行报警触发。
-
光照和水位监测:同样使用滤波方法,避免采集到的信号受电磁干扰影响,确保数据的准确性。
-
-
数据处理:
-
所有传感器采集的数据会被处理成标准格式,然后进行比较与判断。比如温湿度、气体浓度等数据需要与设定的阈值进行对比,判断是否触发报警或启动自动控制功能。
-
3.3 控制逻辑与自动化管理
根据采集到的数据,系统需要执行一系列自动控制操作。具体控制逻辑如下:
-
温湿度控制:
-
目标:保持适宜的温度和湿度范围,以保证禽畜的健康成长。
-
控制逻辑:
-
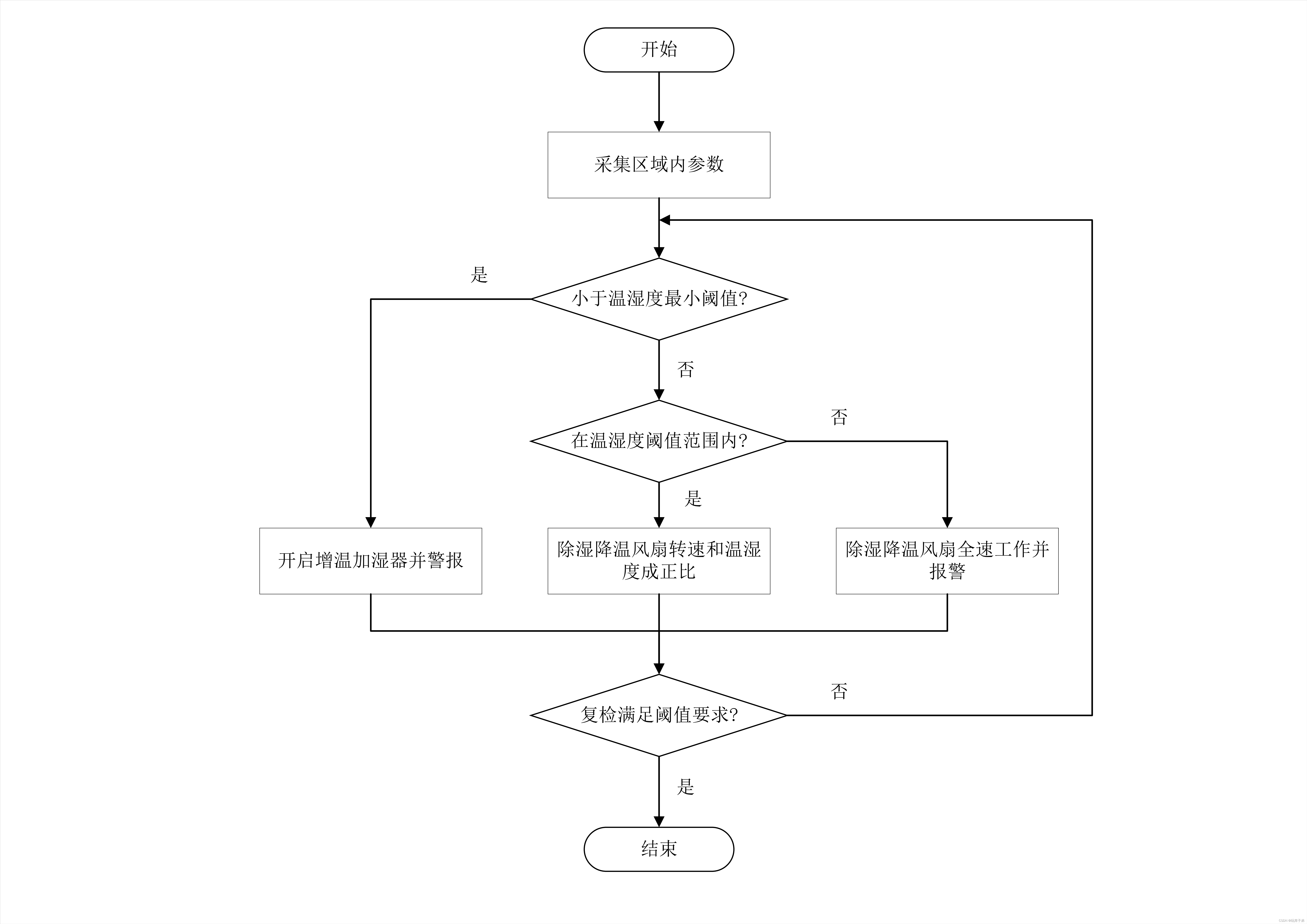
如果温度超过设定阈值,自动启动风扇进行降温。
-
如果温度过低,启动加热器进行升温。
-
如果湿度过低,启动加湿器;湿度过高时,启动排风设备。
-
-
-
水位控制:
-
目标:确保饮水槽内水位的稳定,避免禽畜缺水。
-
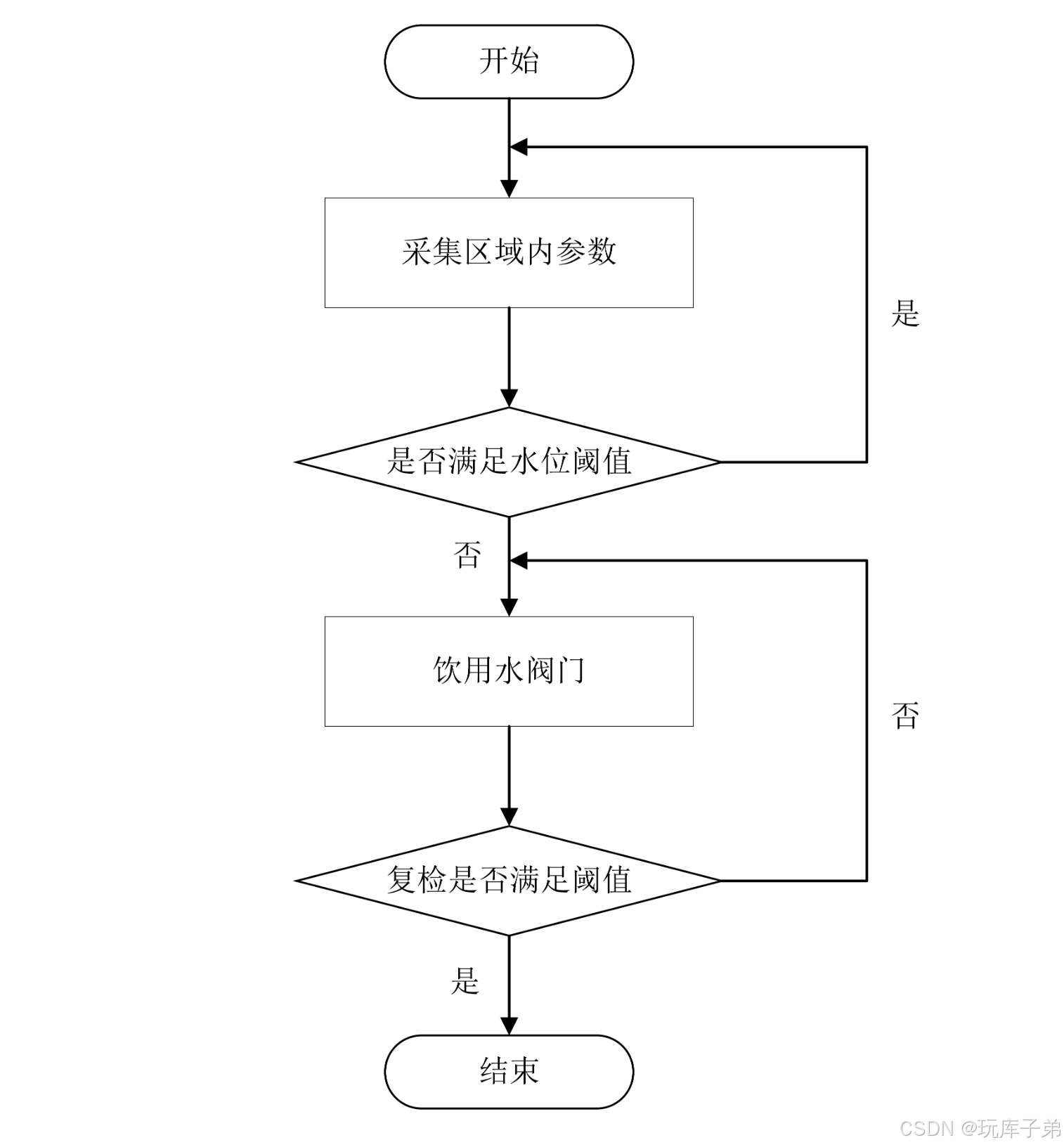
控制逻辑:当水位低于设定阈值时,系统会自动启动水阀进行补水,直到水位恢复到正常范围。
-
-
气体浓度控制:
-
目标:及时发现有害气体泄漏,保障养殖场的安全。
-
控制逻辑:当一氧化碳、酒精或烟雾浓度超过设定阈值时,系统通过蜂鸣器报警,并通过Wi-Fi模块将报警信息发送到云平台,养殖场主可及时采取措施。
-
-
光照控制:
-
目标:提供充足的光照,确保禽畜的健康生长。
-
控制逻辑:通过光照传感器监测光照强度,若光照强度低于设定值,自动启用灯光系统进行补充照明。
-
3.4 通信与远程控制
为了实现远程监控与控制功能,系统通过Wi-Fi模块ESP8266与云平台进行通信。具体的通信方式包括:
-
数据上传:
-
系统定期将采集到的环境数据上传至云平台(例如机智云平台)。这些数据包括温湿度、气体浓度、光照强度、水位等信息。
-
云平台会实时接收并显示养殖场的环境数据,用户可以随时查看。
-
-
远程控制:
-
通过云平台,养殖场主可以远程控制水阀、风扇、加热器等设备。
-
系统会实时传送设备状态信息,确保用户可以通过APP或Web端了解设备运行状态并进行远程控制。
-
-
报警通知:
-
当系统检测到异常情况(如温湿度过高、气体浓度超标等),会通过Wi-Fi模块向云平台发送报警信息,并通过APP或短信通知养殖场主。
-
-
Wi-Fi通信协议:
-
使用标准的TCP/IP协议进行数据传输,确保通信稳定性和安全性。
-
采用MQTT协议进行低功耗的数据传输,适合物联网应用。
-
3.5 用户界面设计
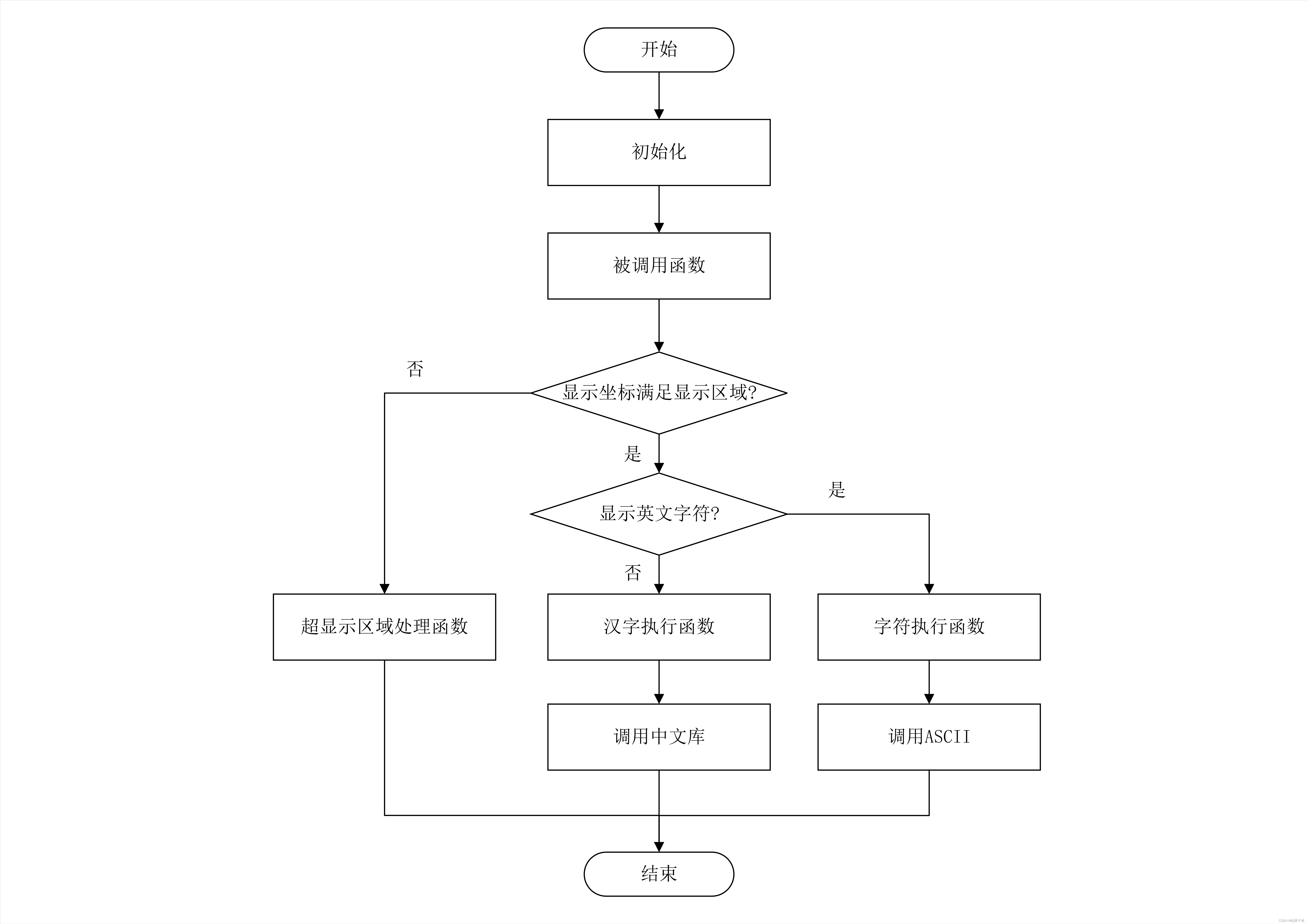
系统通过TFT-LCD显示屏实现本地用户界面,展示养殖场的实时环境数据、报警信息以及设备状态。具体设计如下:
-
实时数据展示:显示温湿度、光照强度、水位、气体浓度等参数的实时数值。
-
图形化展示:使用曲线图或条形图显示温湿度、光照强度等的变化趋势,帮助用户直观地了解环境的变化。
-
报警信息显示:当发生报警事件时,屏幕会显示警告信息,并闪烁显示相关的报警类型(如温度过高、烟雾泄漏等)。
-
交互界面:用户通过按键输入设置参数(如阈值设置)或控制设备(如开关水阀、风扇等)。按键操作通过GPIO读取,实现简单的操作界面。
-
GUI菜单显示界面:
//**************************************************************************************// // // // 主显示界面(Wireshark) // // // // 01:室内温度(0~50℃) // // 02:室内湿度(0%~100%) // // 03:光照强度指数(0~100000LX) // // 04:二氧化碳浓度(0~5000ppm) // // 05:空气质量指数(AQI:0~10000) // // 06:一氧化碳浓度(0~10000ppm) // // 07:酒精浓度(0%~10000) // // 08:烟雾浓度(0~10000ppm) // // 09:水位高度(0~100%(模型模拟)) // // 10:排气扇转速(PWM2:0~100%) // // 11:除湿降温风扇转速(PWM1:0~100%) // // 12:水阀继电器状态(OPEN/CLOSE) // // 13:投食设备继电器状态(OPEN/CLOSE) // // // // // //**************************************************************************************// // // // 主菜单(menus) // // // // 01:设置温度阈值(Set the temperature threshold) // // 02:设置湿度阈值(Set the humidity threshold) // // 03:设置光照强度指数阈值(Set the light intensity index threshold) // // 04:设置二氧化碳浓度阈值(Set the carbon dioxide concentration threshold) // // 05:设置空气质量指数阈值(Set the air quality index threshold) // // 06:设置一氧化碳浓度阈值(Set the carbon monoxide concentration threshold) // // 07:设置酒精浓度阈值(Set the alcohol concentration threshold) // // 08:设置烟雾浓度阈值(Set the smoke concentration threshold) // // 09:设置水位高度阈值(Set the watermark height threshold) // // 10:设置VL53L0X距离阈值(Set the VL53L0X distance threshold) // // 11:校验水位传感器(Check water level sensor) // // 12:校验VL53L0X激光测距(Calibration VL53L0X laser ranging) // // 13:删除WiFi连接信息(Delete WiFi connection information) // // 14:WiFi连接设置(Setting up WiFi connection) // // 15:恢复出厂设置(Restore Factory Defaults) // // 16:返回上级界面(Return to superior screen) // // // // NOTE: 除最后四项以外,以上其它菜单选项设置的阈值(最大值和最小值),皆是为了控制排气扇 // // 和除湿降温风扇的PWM占空比,PWM1和PWM2都挂在高级定时器TIM1下,分别对应TIM1_CH1和 // // TIM1_CH4.为了实现更好的监控,在修改菜单参数后,将修改值直接写入E2PROM中,防止系统 // // 系统异常掉电造成调试好的数据丢失,从而酿造成的一系列不可控的现象.机智云服务器系 // // 统则实时显示各个参数的数值(如:光照强度指数/二氧化碳浓度等). // // 鉴于MQ系列气体传感器的工作条件,请每次开机后先预热五分钟左右,防止使其工作在不稳 // // 定状态,应加入软件滤波. // // // //**************************************************************************************// -
定义功能的部分代码:
/*******************************************************************************************************/ //函数功能: key_table结构体重定义 //输入参值: 无 //返 回 值: 无 //函数说明: /*******************************************************************************************************/ key_table table[33]= { { 0,0, 0, 0, 1,(*Wireshark)}, //主显示信息界面 { 1,32,16, 2,17,(*Temperature_menu)}, //01:设置温度阈值(Set the temperature threshold) { 2,32, 1, 3,18,(*Humidity_menu)}, //02:设置湿度阈值(Set the humidity threshold) { 3,32, 2, 4,19,(*Light_intensity_menu)}, //03:设置光照强度指数阈值(Set the light intensity index threshold) { 4,32, 3, 5,20,(*Dioxide_concentr_menu)}, //04:设置二氧化碳浓度阈值(Set the carbon dioxide concentration threshold) { 5,32, 4, 6,21,(*Air_quality_menu)}, //05:设置空气质量指数阈值(Set the air quality index threshold) { 6,32, 5, 7,22,(*Monoxide_concentr_menu)}, //06:设置一氧化碳浓度阈值(Set the carbon monoxide concentration threshold) { 7,32, 6, 8,23,(*Alcohol_concentr_menu)}, //07:设置酒精浓度阈值(Set the alcohol concentration threshold) { 8,32, 7, 9,24,(*Smoke_concentr_menu)}, //08:设置烟雾浓度阈值(Set the smoke concentration threshold) { 9,32, 8,10,25,(*Water_height_menu)}, //09:设置水位高度阈值(Set the watermark height threshold) {10,32, 9,11,26,(*VL53L0X_distance_menu)}, //10:设置VL53L0X距离阈值(Set the VL53L0X distance threshold) {11,32,10,12,27,(*Waterlevelcheck_menu)}, //11:校验水位传感器(Check water level sensor) {12,32,11,13,28,(*VL53L0X_calibration_menu)}, //12:校验VL53L0X激光测距(Calibration VL53L0X laser ranging) {13,32,12,14,29,(*WiFi_Delete_cofg_menu)}, //13:删除WiFi连接信息(Delete WiFi connection information) {14,32,13,15,30,(*WiFi_connection_menu)}, //14:WiFi连接设置(Setting up WiFi connection) {15,32,14,16,31,(*Restore_Factory_menu)}, //15:恢复出厂设置(Restore Factory Defaults) {16,32,15, 1,32,(*Return_screen_menu)}, //16:返回上级界面(Return to superior screen) {17,0,17,17, 1,(*Temperature_Parameter_display)}, //主菜单界面(三级界面) {18,0,18,18, 2,(*Humidity_Parameter_display)}, //主菜单界面(三级界面) {19,0,19,19, 3,(*Illumination_Parameter_display)}, //主菜单界面(三级界面) {20,0,20,20, 4,(*Dioxide_Parameter_display)}, //主菜单界面(三级界面) {21,0,21,21, 5,(*Air_quality_Parameter_display)}, //主菜单界面(三级界面) {22,0,22,22, 6,(*Carbon_monoxide_Parameter_display)}, //主菜单界面(三级界面) {23,0,23,23, 7,(*Alcohol_con_Parameter_display)}, //主菜单界面(三级界面) {24,0,24,24, 8,(*Smokescope_Parameter_display)}, //主菜单界面(三级界面) {25,0,25,25, 9,(*Water_level_Parameter_display)}, //主菜单界面(三级界面) {26,0,26,26,10,(*VL53L0X_distance_Parameter_display)}, //主菜单界面(三级界面) {27,0,27,27,11,(*Check_water_level)}, //主菜单界面(三级界面) {28,0,28,28,12,(**Calibration_VL53L0X_laser)}, //主菜单界面(三级界面) {29,0,29,29,13,(*Delete_WiFi_information)}, //主菜单界面(三级界面) {30,0,30,30,14,(*Setting_up_WiFi)}, //主菜单界面(三级界面) {31,0,31,31,15,(*Restore_Factory_Defaults)}, //主菜单界面(三级界面) {32,32,32,32,32,(*Returns_function)}, //主菜单界面(三级界面) };
3.6 软件调试与测试
软件调试是整个系统开发过程中的关键环节。为了确保系统的稳定性与可靠性,我进行了一系列的调试与测试工作,包括:
-
硬件接口调试:确保所有传感器和执行器的连接正确,并能够稳定工作。
-
功能测试:测试各个传感器的数据采集功能,确保数据精确且无误。测试自动控制逻辑是否符合预期(如水位控制、温湿度控制等)。
-
远程控制功能测试:测试Wi-Fi模块与云平台的通信稳定性,确保数据能够实时上传。测试远程控制功能,确保通过APP或Web端能够控制系统设备。
-
系统稳定性测试:长时间运行测试,验证系统在不同环境条件下的稳定性。测试不同传感器的响应速度与精度,确保系统能够应对各种复杂环境变化。
3.7 小结
本章介绍了基于STM32的禽畜养殖监控系统的软件设计与实现。系统的软件架构清晰、功能模块分明,包含了数据采集、控制逻辑、远程通信、用户界面以及报警通知等多个方面。通过Wi-Fi模块和云平台的结合,系统实现了远程监控与控制功能,能够有效提高养殖管理的智能化水平。在后续章节中,将介绍系统的实际应用和性能评估。
第四章:总结与展望
4.1 总结
本系统结合了硬件和软件设计的多个方面,旨在提高养殖场的管理效率、保障禽畜的生长环境,同时降低人工干预。系统的硬件部分采用了STM32微控制器作为核心,配合多种传感器(如温湿度传感器、空气质量传感器、水位传感器等)和执行器(如水阀、风扇、喂食器等),实现了环境监测和自动化控制。软件部分包括数据采集与处理、控制逻辑、远程控制、报警功能等,支持通过云平台进行远程监控与管理。
具体而言,系统的关键功能包括:
-
环境数据采集与处理:通过多种传感器实时监测温湿度、空气质量、水位、光照等参数,并经过数据滤波与处理,确保数据的准确性。
-
自动化控制:系统根据采集到的环境数据自动调节风扇、加热器、水阀等设备,确保养殖场内温湿度、光照等环境参数处于适宜范围。
-
报警与通知:在检测到异常数据(如有害气体浓度过高、水位过低等)时,系统会自动触发报警,并通过Wi-Fi模块向云平台上传报警信息,养殖场主可通过APP或Web端接收通知。
-
远程监控与控制:通过ESP8266 Wi-Fi模块,系统实现了远程数据上传与设备控制,养殖场主可以随时随地查看养殖场环境数据,并远程控制相关设备。
本系统不仅提升了养殖场的自动化水平,也为养殖管理提供了更高效、更智能的解决方案。通过云平台的远程监控功能,养殖场主可以实时掌握养殖环境的变化,及时采取措施应对突发情况,保障禽畜的健康生长。
4.2 展望
尽管本系统已具备一定的功能和实用性,但仍然存在一些改进和扩展的空间,未来可以从以下几个方面进行优化和提升:
-
多传感器数据融合与智能决策:
-
目前系统中的控制逻辑基于单一传感器的阈值判断,未来可以考虑引入数据融合算法(如卡尔曼滤波、模糊逻辑等)对多个传感器的数据进行综合分析,从而实现更加智能的环境调节。
-
通过引入机器学习或深度学习技术,系统可以根据历史数据分析预测环境变化趋势,提前采取适应性措施,如自动调整温湿度、预测喂食时间等。
-
-
系统的鲁棒性与稳定性:
-
在未来的应用中,系统可能会面临更复杂的环境变化和长时间运行的挑战。可以进一步优化硬件设计和软件算法,确保系统在极端条件下仍能稳定运行。
-
提高电源管理和通信稳定性,确保在不同的工作环境下,系统能够稳定可靠地运行。
-
-
多平台兼容与扩展:
-
除了机智云平台外,未来可以考虑支持更多的物联网平台,提升系统的兼容性和应用范围。
-
可以进一步扩展系统的功能,支持更多传感器(如土壤湿度传感器、温度差传感器等),以及更多控制设备(如自动喂药系统、自动光照调节系统等)。
-
-
用户体验优化:
-
可以进一步改进用户界面,使其更加直观和易用。例如,通过图表和数据分析功能,让用户更方便地查看养殖场的历史数据与趋势。
-
增强系统的交互性,支持语音控制、手势控制等先进的输入方式,提升用户体验。
-
-
环境友好与能源管理:
-
在系统设计中引入更多节能策略,如通过太阳能供电等绿色能源方式,减少传统能源的依赖,提升系统的环境友好性。
-
可以进一步优化自动化控制的策略,通过精确控制设备的运行,减少能源消耗,降低运营成本。
-
4.3 结语
本系统成功地实现了基于STM32的智能禽畜养殖监控系统,为养殖业的自动化、智能化管理提供了一个可行的解决方案。通过集成多种传感器和自动控制设备,系统能够实时监测和调节养殖环境,保障禽畜的健康成长。
附录
A:流程图
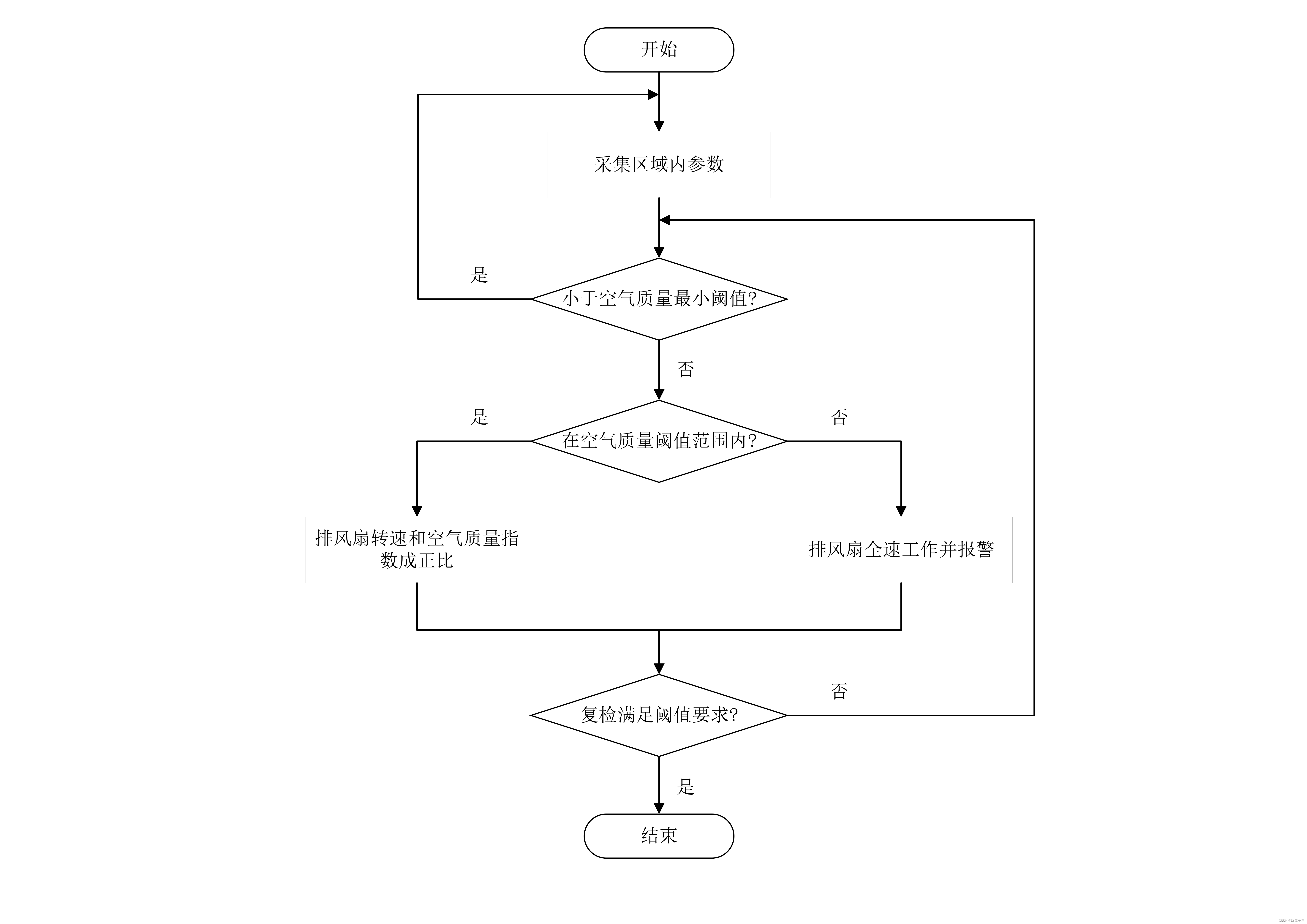
A1. 空气质量传感器
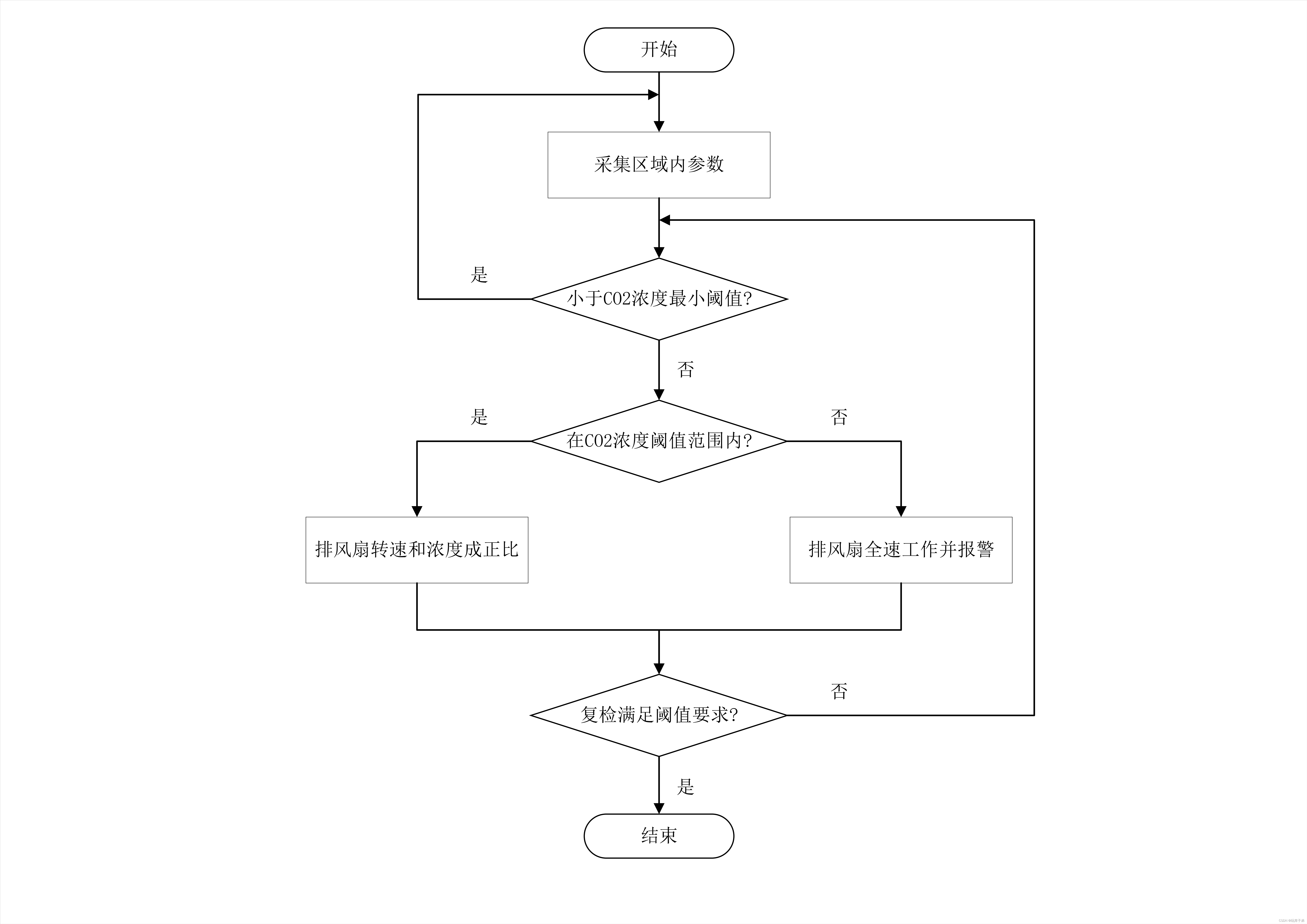
A2. 气体浓度传感器
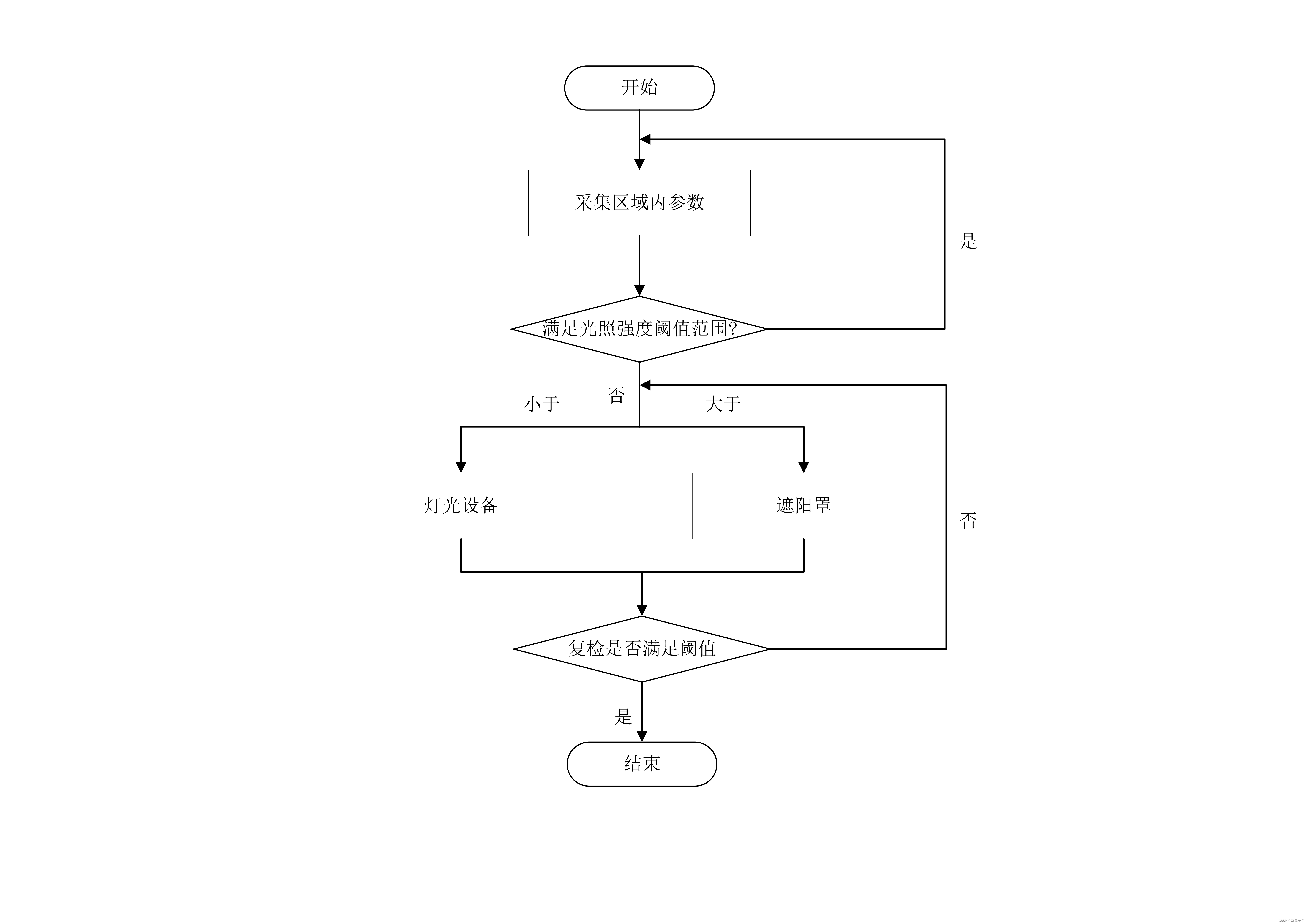
A3. 光照强度传感器
A4. 温湿度传感器
A5. 激光测距传感器
A6. 水位传感器
A7. TFT-LCD显示
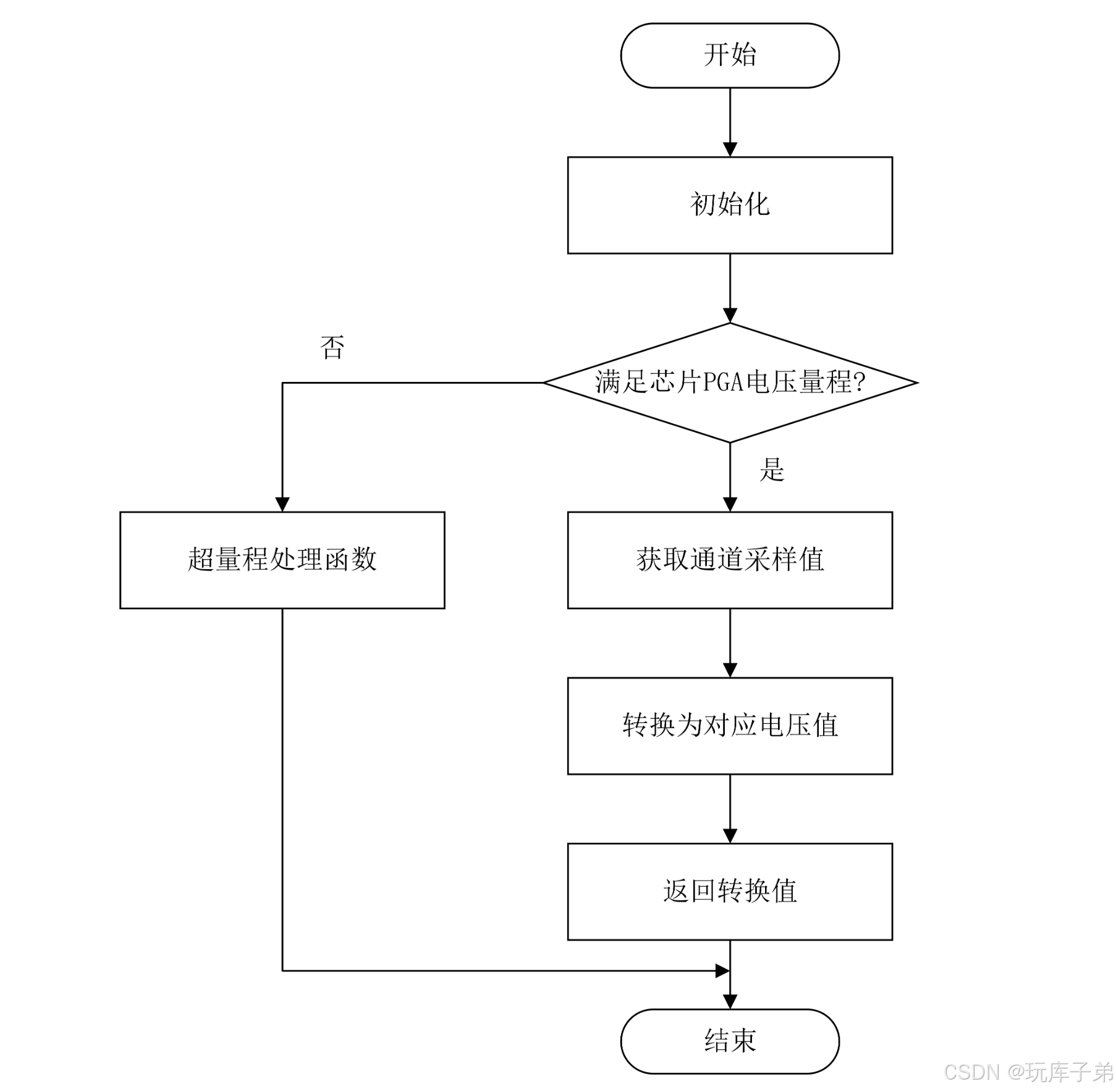
A8. ADS1115模数转换
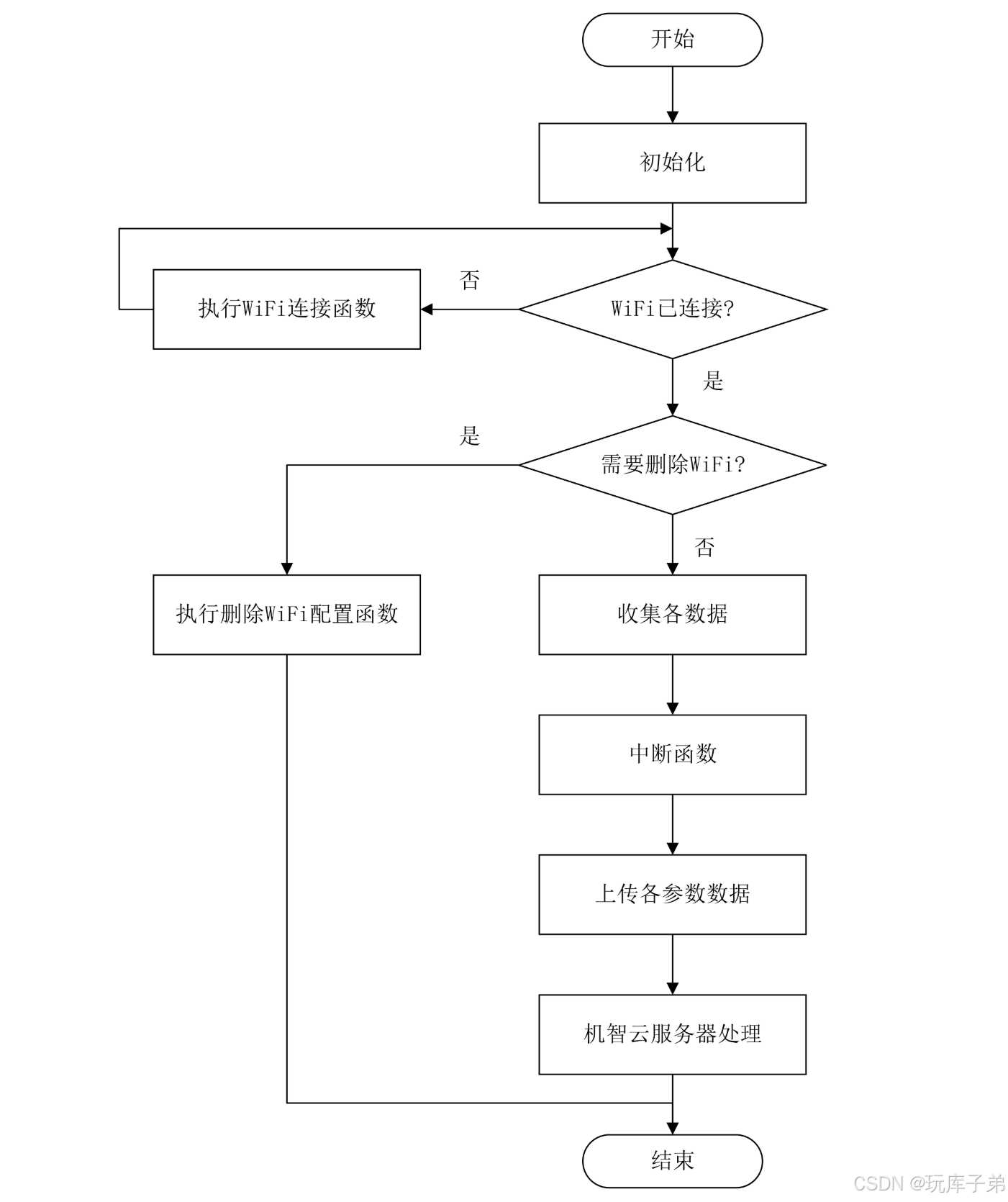
A9. WiFi数据交互
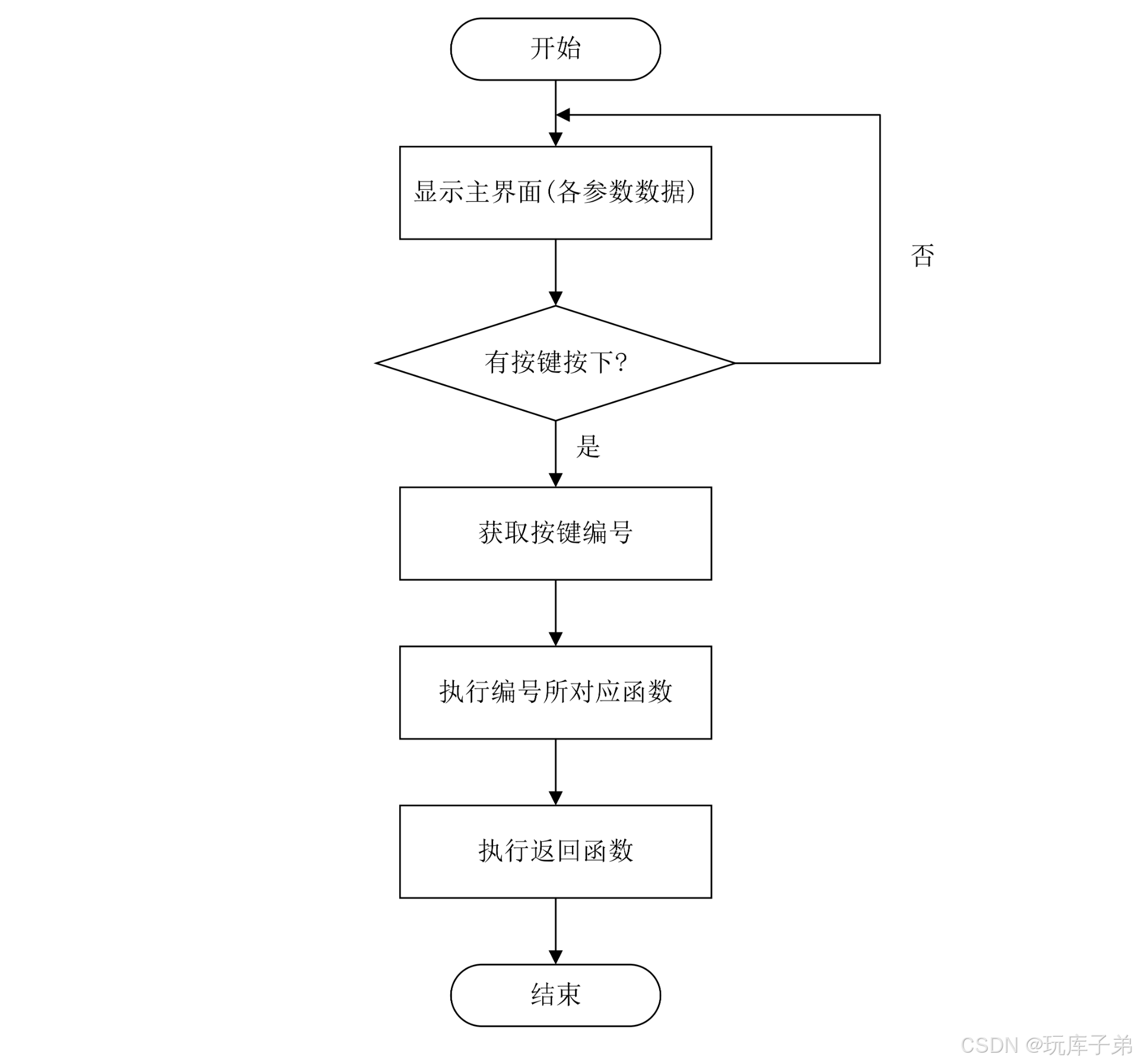
A10. GUI程序设计
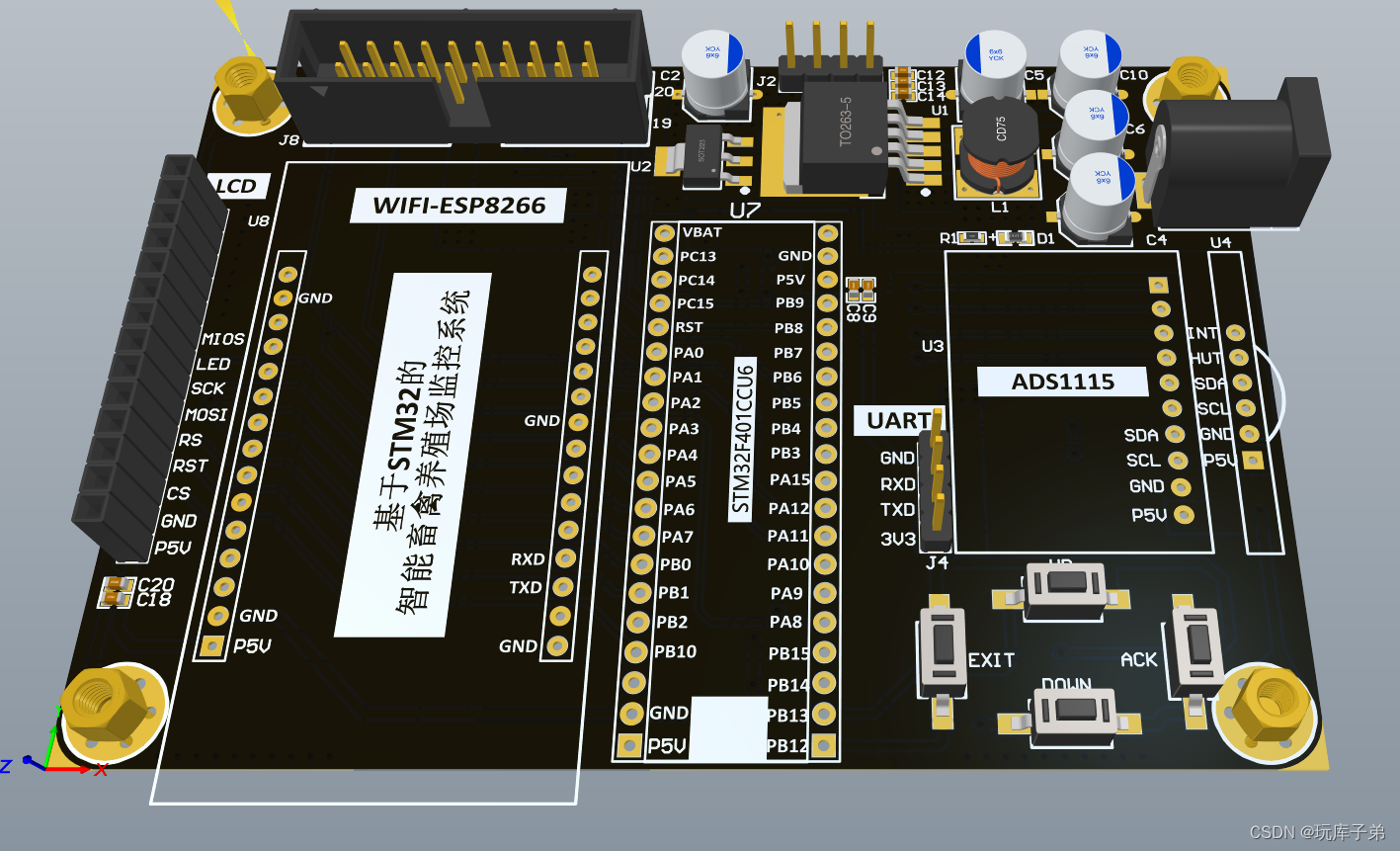
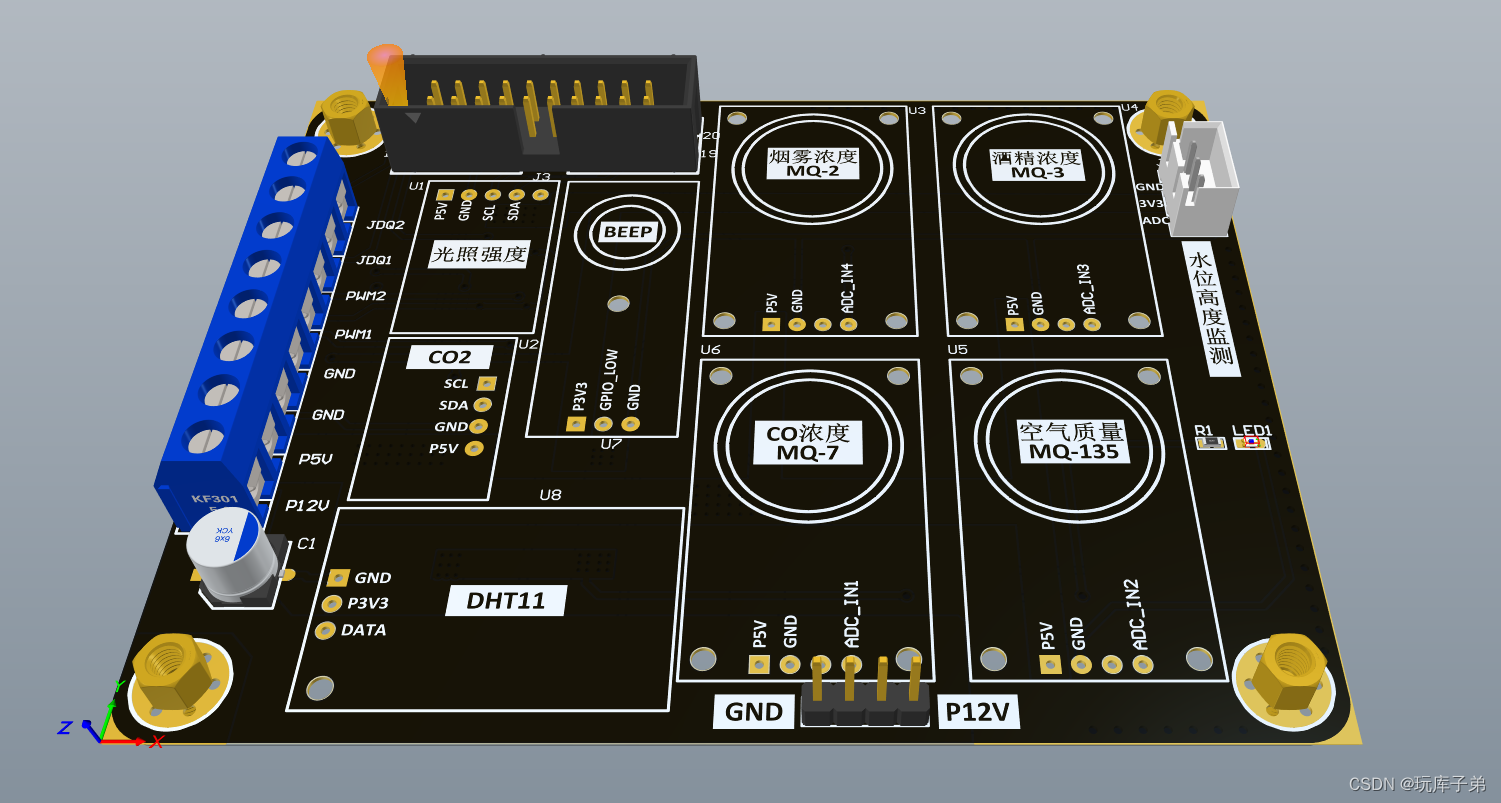
B:PCB 3D图
B1. 主控板
B2. 采集板

















 1451
1451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









