







主从控制即建立主手和从手之间的映射关系,并根据次映射关系设计相应的控制方法实现主手对从手的完全控制。
- 遥操作机器人是当前主从控制的应用最广的方式之一。
- 主从操作机器人的设计过程中,首先要在硬件方面满足作业要求的前提,保证主从结构框架尽可能的对应,自由度完全相同,运动方式基本对应;在控制系统方面,通过运动学方程实现运动的匹配映射。最终软硬件结合,实现异构结构达到同构的实际操作控制效果。
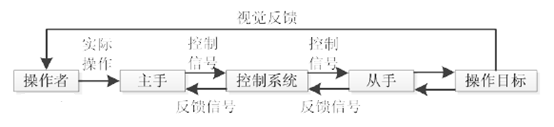
- 主从操作系统由以下几个部分组成:主控端、控制系统、从控端、反馈系统。
- 根据助手和从手的构型,可分为主从同构型和主从异构型。
主从同构型:主手和从手的结构完全相同,只是在尺寸上有所区别;优点:主从映射简单,控制模式易于实现;缺点:通用性较差,适用领域有限。
主从异构型:主手和从手结构相异,主手采用独立设计;优点:主手设计不受限制,通用性较好;缺点:控制较为复杂,需要实时求解主从系统的正逆运动学甚至动力学。 - 常用的机器人运动控制方式有三种:笛卡尔空间控制方式、关节控制控制方式和逆雅可比控制方式。其中笛卡尔空间控制方式适用于主从异构型,在实际控制过程中需要实时调节主手对从手的不同形成映射关系。
主从控制中消除通讯延时的方法:(增强)波变量法、基于环境模型方法。
波变量法的优势:不需要知道延时的大小、任意不变延时、不需要知道主从端模型、易于实现;缺陷:位置/速度和力的跟踪效果差、理论上只针对不变延时有效、条件过于保守、需要假设主从端、操作者和环境都是passive的。
基于环境模型方法的优势:无需直接反馈接触力、操作端可以直接得到准确的接触力(如果模型足够准确)、在变延时情况下,两个闭环系统仍可以保证稳定;缺陷:很难获得软组织准确模型、有限元等方法可以得到准确的模型,但是计算量过大,无法用于实时性要求高的机器人系统。


















 2237
2237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









