





一、 引言
在材料加工、模具设计及机械性能测试等领域,对金属柱体(尤其是模具钢等高强度材料)在约束条件下的压缩行为研究至关重要。ABAQUS作为强大的非线性有限元分析软件,能够精确模拟此类涉及大变形、材料非线性和复杂接触的问题。本文聚焦于包含压头、被压柱体和外模具三部分的压缩仿真模型,模拟柱体在刚性压头作用下、受外模具约束的变形过程。
二、 模型建立
1. 部件创建
- 压头 (Punch): 通常视为刚体。创建为圆柱体或平板(取决于实际工况),尺寸小于外模具内径。属性设置为
刚性体。 - 被压柱体 (Cylinder): 目标研究对象,由模具钢制成。创建为圆柱体。赋予模具钢的弹塑性材料属性。
- 外模具 (Die): 提供径向约束。创建为空心圆柱体,内径略大于柱体直径(考虑间隙)。通常也设为
刚性体或赋予高刚度弹性材料。 
2. 材料属性定义
被压柱体的模具钢材料需定义其弹性模量、泊松比以及塑性应力-应变关系(例如,通过实验数据拟合的Johnson-Cook模型或幂硬化模型)。压头和外模具若设为刚体,则无需定义材料本构,建立为可变形实体时,给其赋予一个弹性模量较高的材料属性即可。
| 9CrSi,HRC≥62(淬火态) | ||
| 密度(Kg/m3) | 7800 | |
| 弹性模量(Mpa) | 211000 | |
| 泊松比 | 0.29 | |
| 塑性参数 | 塑性应变 | 屈服强度(Mpa) |
| 0 | 2300 | |
| 0.005 | 2450 | |
| 0.01 | 2550 | |
| 0.02 | 2700 | |
| 0.03 | 2800 | |
| 损伤准则 | Shear准则 | |
| 0.5,0.1,0 | ||
| 断裂能 | ||
| 30N/mm | ||
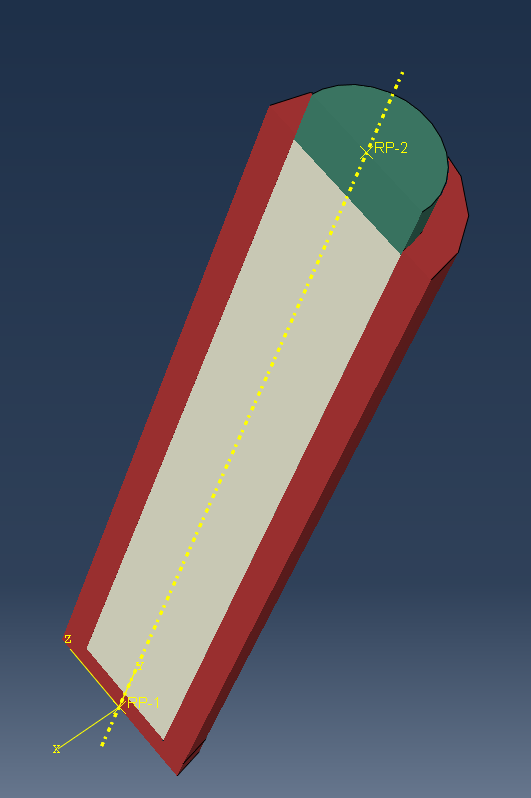
3. 装配
将三个部件在ABAQUS的Assembly模块中进行定位。确保:
- 柱体放置在外模具中心,与外模具之间存在5 μm间隙。
- 压头初始位置位于柱体顶端上方一定距离(便于定义初始接触和加载)。
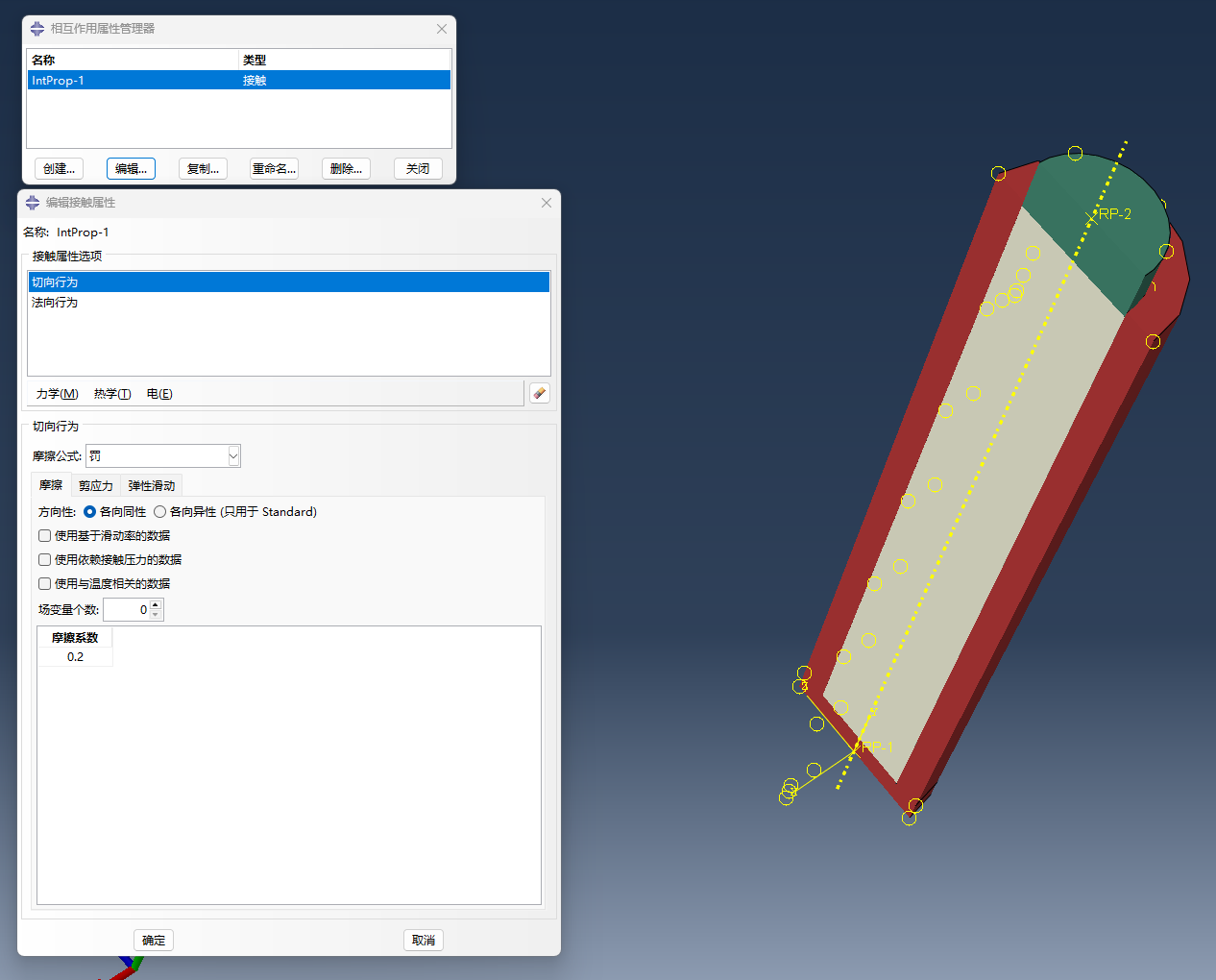
三、 相互作用设置
接触关系的正确设置是仿真成功的关键。
- 压头 - 柱体接触: 定义压头底面与柱体顶面的面-面接触 (
Surface-to-Surface Contact)。接触属性包括:- 法向行为:
硬接触(允许分离)。 - 切向行为:
摩擦。模具钢间的摩擦系数需根据实际情况或文献设定(这里我们给0.2),使用罚函数。
- 法向行为:
- 柱体 - 外模具接触: 定义柱体侧面与外模具内壁的面-面接触。接触属性类似压头-柱体接触,但摩擦系数可能不同(需考虑润滑情况)。
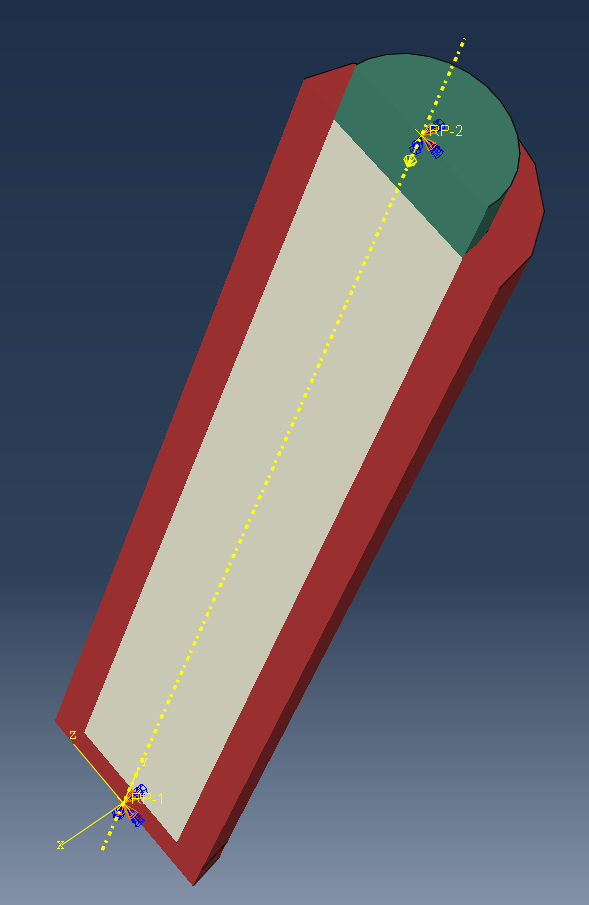
四、 载荷与边界条件
- 边界条件:
- 外模具: 固定其底部和/或外侧面(约束所有自由度)。
- 压头: 约束除加载方向(通常是Y轴负向)外的所有平动和转动自由度。在压头参考点上施加位移或力载荷。
- 柱体: 底部通常不直接约束(与外模具接触约束)。
- 载荷施加: 在压头的参考点上施加位移控制的向下位移(模拟压机行程)或力控制的载荷(模拟压机压力)。位移控制更利于观察整个变形过程。
五、 网格划分
- 柱体: 由于涉及塑性大变形,需要较细密的网格。使用C3D8R (8节点线性减积分六面体单元) 或 C3D10M (10节点修正二次四面体单元,适合大变形)。在预期变形剧烈的区域(顶部、中部)加密网格。
- 压头与外模具: 若为刚体,网格可相对粗糙(但仍需保证接触精度),单元类型如R3D4 (4节点刚性四边形)。若赋予弹性材料,则需适当划分网格。
六、 分析步设定
- 初始步: 通常用于检查初始接触状态。
- 分析步:
- 类型:
Static, General(静力分析) 或Dynamic, Explicit(显式动力学分析,适用于涉及屈曲或高速冲击的场景)。 - 打开
大变形选项 (Nlgeom=ON)。 - 设置合适的增量步长和最大增量数。使用自动时间步长有助于收敛。
- 类型:
七、 提交计算与后处理
提交作业进行计算。计算完成后,在Visualization模块中查看结果:
- 变形动画: 直观展示压缩过程,观察柱体的整体变形模式、鼓胀效应。
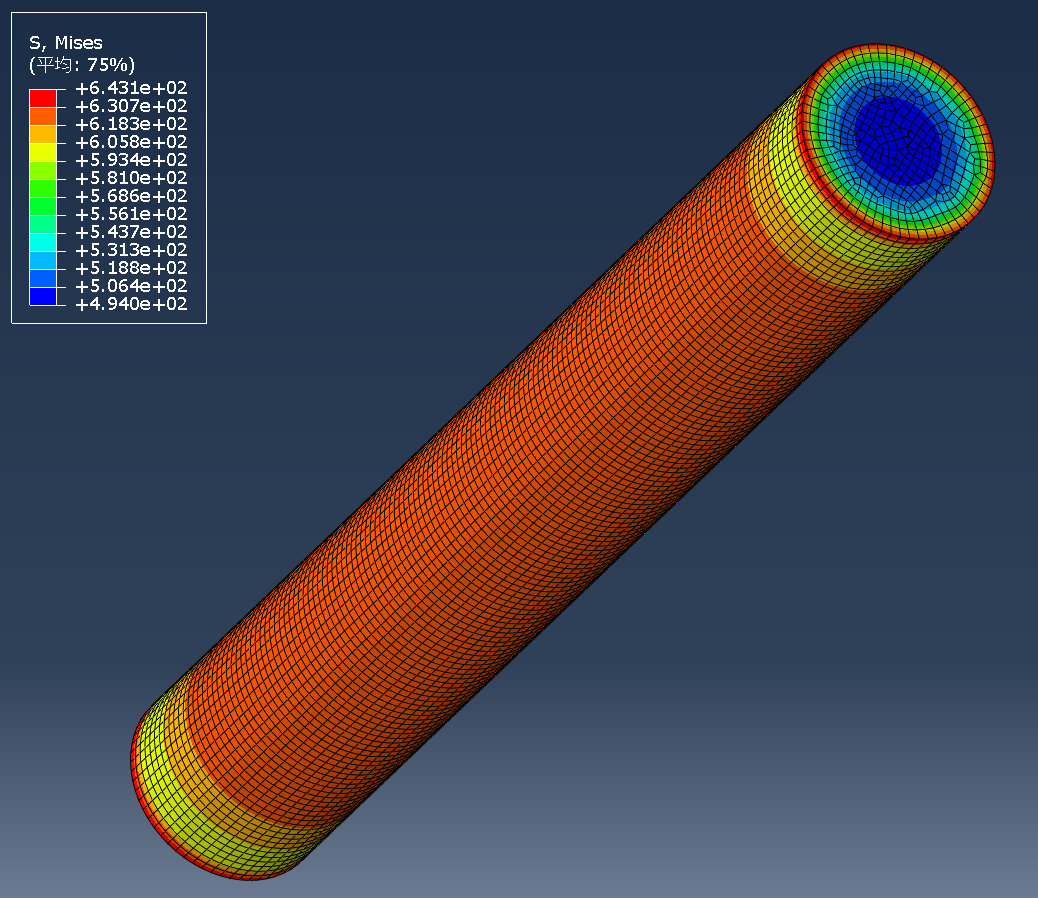
- 应力云图:
- Mises应力: 评估材料的屈服和塑性变形区域。
- 接触压力: 观察压头/柱体以及柱体/外模具接触面上的压力分布。
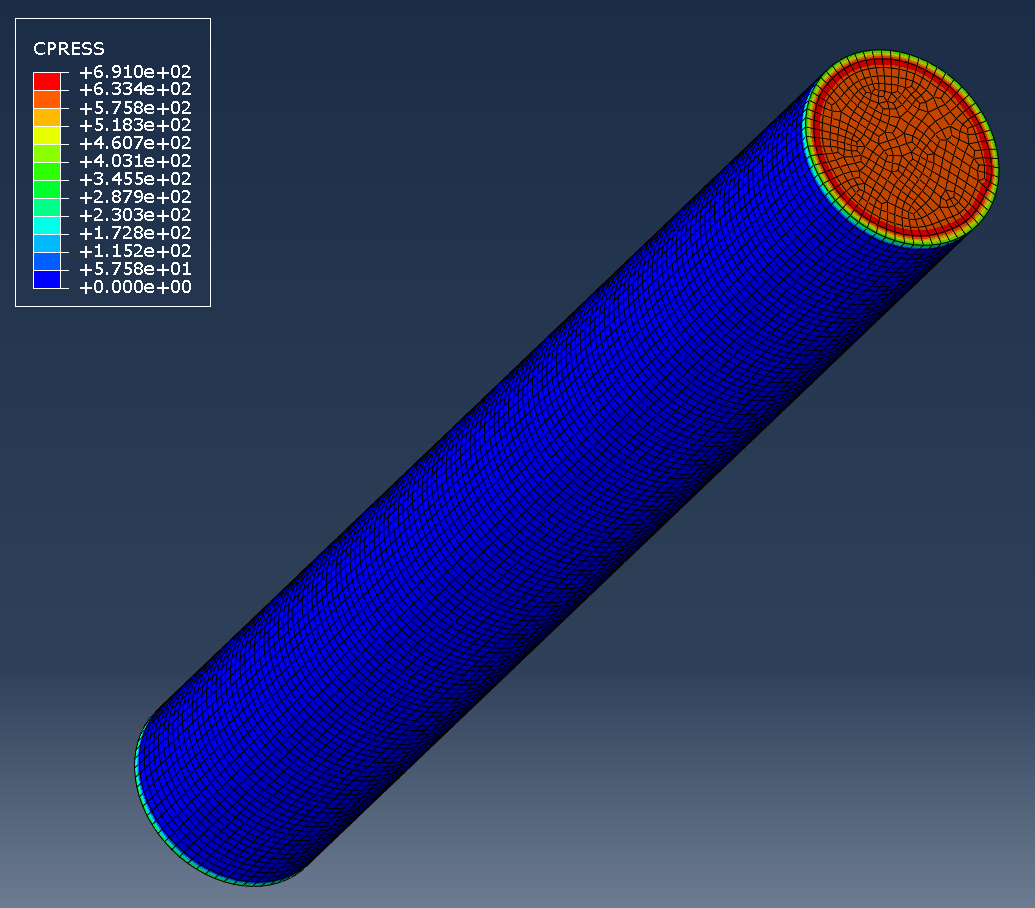
- Mises应力: 评估材料的屈服和塑性变形区域。
- 应变云图:
- 等效塑性应变 (PEEQ): 直接反映材料的塑性变形程度。
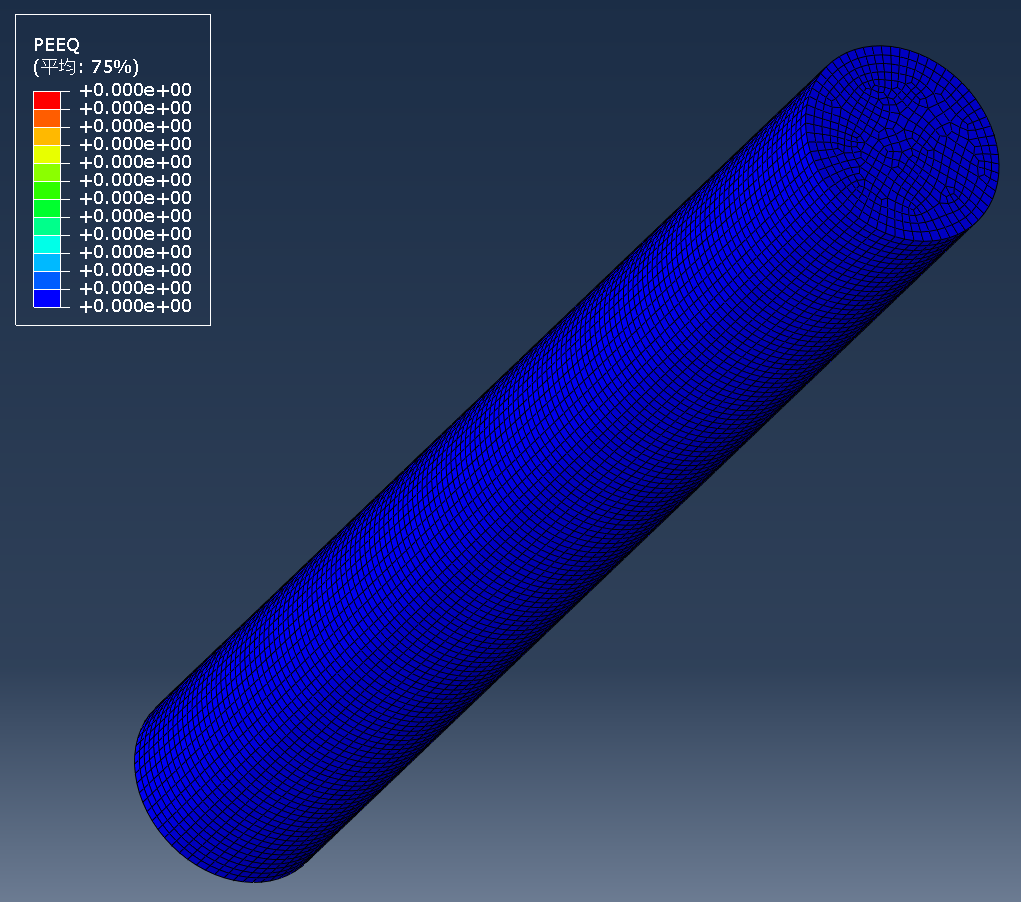
- 等效塑性应变 (PEEQ): 直接反映材料的塑性变形程度。
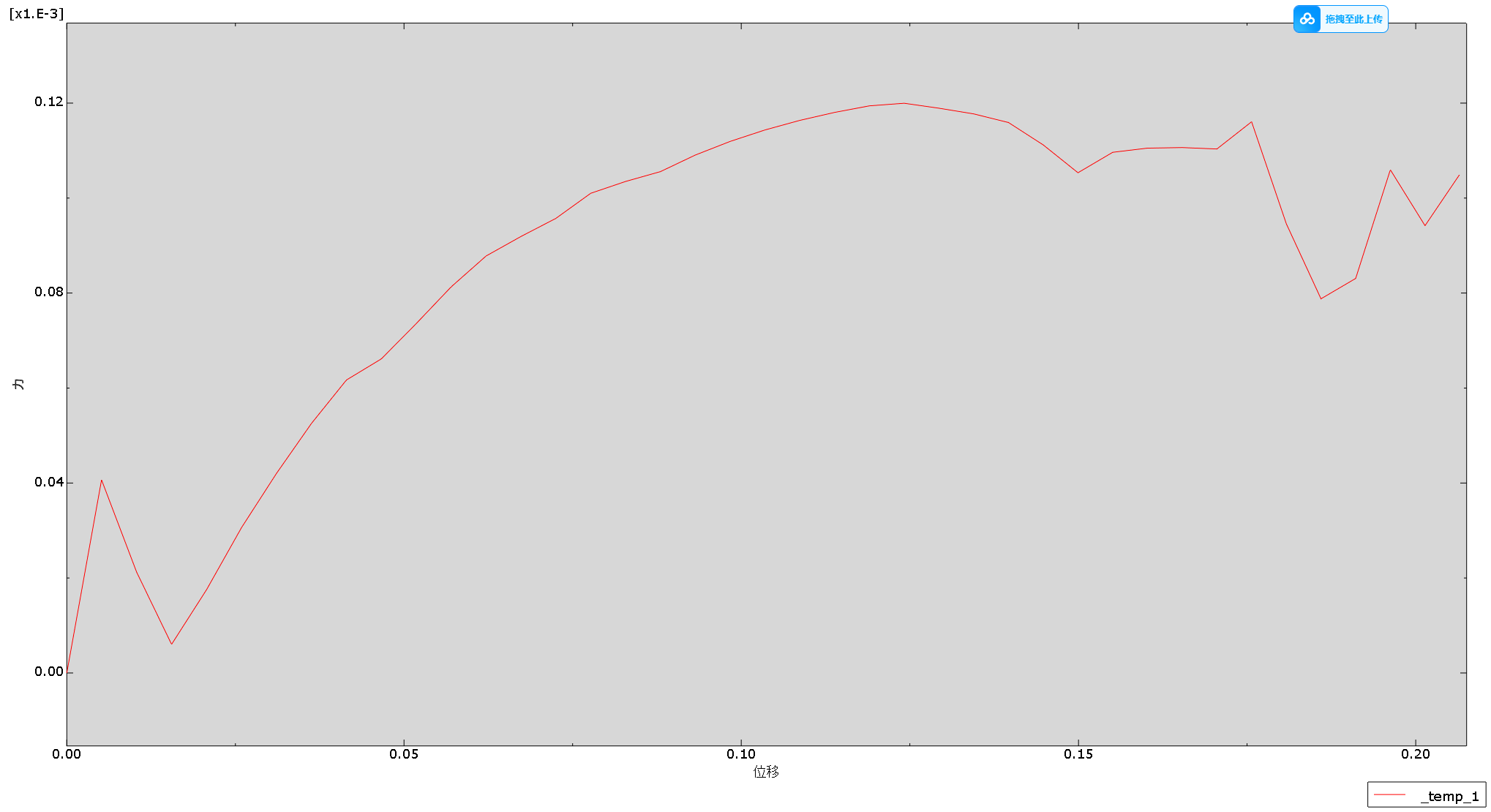
- 反作用力: 提取压头参考点上的反作用力,绘制力-位移曲线,评估压缩载荷。
- 接触状态: 检查接触面是否存在过度穿透或分离异常。
八、 结果分析与讨论
- 分析柱体最终的变形形状(如鼓胀程度)是否符合预期。
- 观察高应力区和塑性应变区的分布,评估潜在的失效位置(如屈服、开裂风险)。
- 讨论摩擦系数对变形模式、鼓胀程度和所需压缩力的影响。
- 力-位移曲线可用于评估模具钢的压缩力学性能(如屈服强度、流动应力)。
九、 总结
本文详细阐述了在ABAQUS中建立包含压头、模具钢柱体和外模具的三部件压缩仿真模型的关键步骤。重点强调了接触定义、材料非线性(塑性)、大变形设置和后处理分析。通过此类仿真,工程师可以在实际物理试验前预测材料的变形行为、评估模具设计的合理性以及优化工艺参数,从而降低成本、缩短研发周期。
注意事项:
- 材料数据: 模具钢的具体牌号(如H13、Cr12MoV、9CrSi)及其准确的弹塑性参数(弹性模量、泊松比、真实应力-真实塑性应变数据)是仿真准确性的基础,需通过实验获取。
- 摩擦系数: 摩擦系数对结果影响显著,应根据接触副材料和润滑条件谨慎选取。
- 网格敏感性: 进行网格收敛性研究,确保结果不受网格密度过度影响。
- 单元选择: 大变形问题优先考虑使用适合大变形的单元类型。
- 显式与隐式: 对于稳定性问题(如屈曲)或高速冲击,显式动力学分析 (
Explicit) 可能比隐式静力分析 (Standard) 更合适,但计算成本更高。
希望这篇文章对您的ABAQUS压缩仿真工作有所帮助!欢迎在评论区交流讨论。

















 1783
1783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









