







 超级会员免费看
超级会员免费看
 本文介绍了传统多视图立体算法PatchMatchStereo(PMS),探讨了其解决视差估计阶梯现象的创新点,包括倾斜支持窗口模型和优化搜索算法。通过空间和视角传播实现高效匹配,结合李迎松博士的源码实践,帮助读者理解并应用PMS算法。
本文介绍了传统多视图立体算法PatchMatchStereo(PMS),探讨了其解决视差估计阶梯现象的创新点,包括倾斜支持窗口模型和优化搜索算法。通过空间和视角传播实现高效匹配,结合李迎松博士的源码实践,帮助读者理解并应用PMS算法。
1.引言
多视图立体技术是一种从已知相机内外参数的多个视角的彩色影像中,利用立体匹配算法恢复立体结构的三维视觉技术。本篇文章将带来MVS的传统方法PatchMatch Stereo和源码实践。
作为立体视觉的经典之作,PatchMatchStereo[1](以下简介为“PMS”)重述了DSI以及视差平面等概念。本文作为这一系列的引论,先抛砖引玉,主要介绍PMS的基本思路和创新点,再带来李迎松大佬的代码进行代码供大家参考,快速上手。
PatchMatchStereo主要提出了更早以前的视差估计方法中的两种做法:
1)以前的视差平面采样都假设各个视差平面前向平行(图1),并且垂直与深度维度,即以光心为原点,以光轴为法线方向垂直均匀采样。
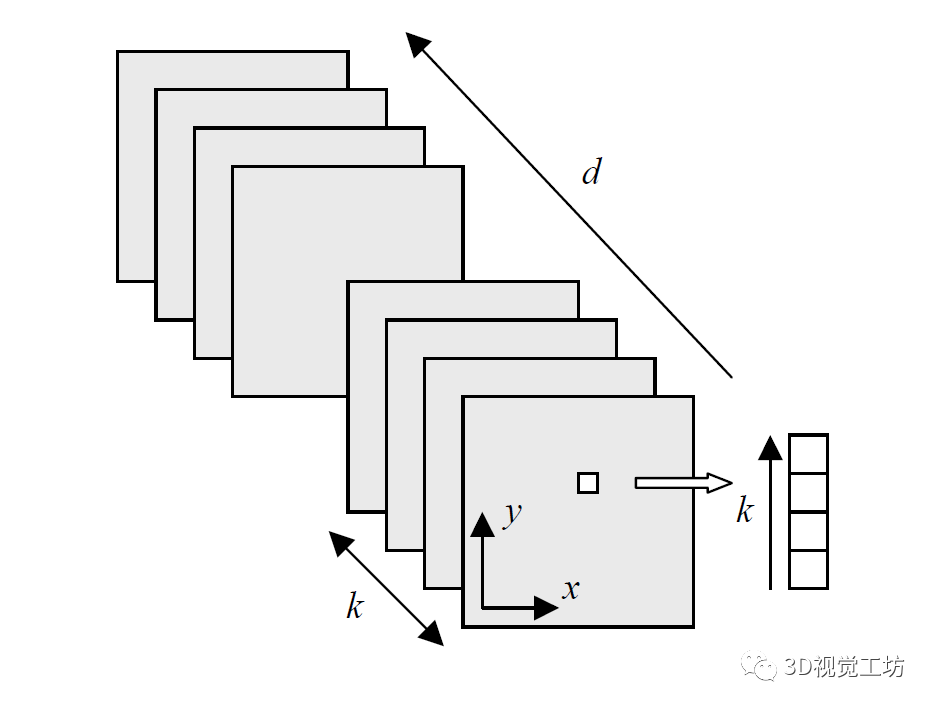
图1 视差平面示意图
2)视差采样是整数值采样。前向垂直的采样方式(图2-a)不能很好地贴合物体平面,图2-b)则是倾斜视窗地采样策略,会极大地提升采样精度。

图2 视差采样策略,a) 原始整数值采样以及垂直视窗策略 b) 子像素级采样以及倾斜视窗策略,
以上两种做法虽然可以得到正确的视差估

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 391
391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











