







 超级会员免费看
超级会员免费看
 本文详细介绍了如何在EPSON机器人上建立工具坐标系,包括开启电机、戳点示教和验证坐标系正确性。此外,还阐述了EPSON机器人TCP/IP通讯的设置步骤,包括配置IP地址、设定服务器和客户端角色,并提供了简单的通讯代码示例,以及使用TCP/UDP调试工具进行交互的方法。
本文详细介绍了如何在EPSON机器人上建立工具坐标系,包括开启电机、戳点示教和验证坐标系正确性。此外,还阐述了EPSON机器人TCP/IP通讯的设置步骤,包括配置IP地址、设定服务器和客户端角色,并提供了简单的通讯代码示例,以及使用TCP/UDP调试工具进行交互的方法。
视觉IMAX的第37篇原创文章
前言
近期对于EPSON机器人建立工具坐标系及TCP通讯知识进行了些简单研究,现将其总结如下。
一 EPSON机器人建立工具坐标系
方法步骤如下:
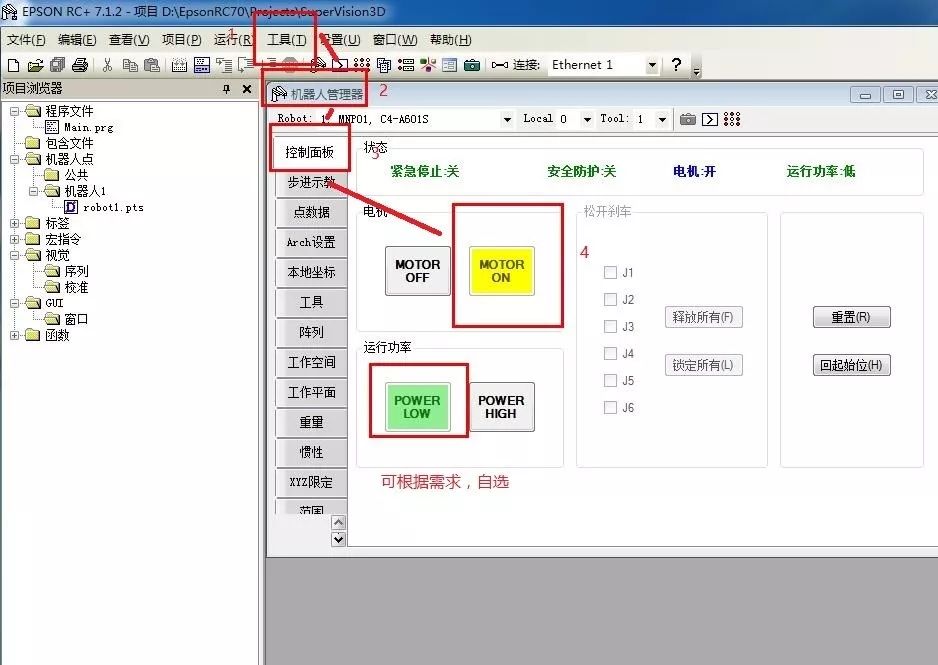
1、步骤一:开启EPSON机械臂电机,见图1。
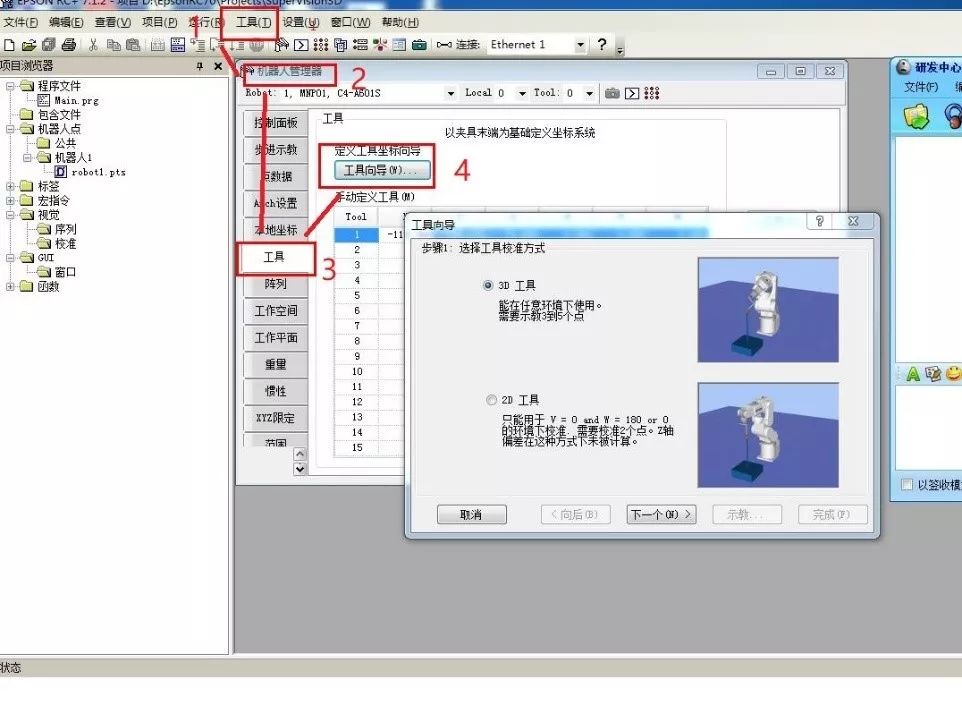
2、步骤二:进行戳点示教点位,建立工具坐标系,
打开EPSON的SDK软件界面——>工具——>机器人管理器——>「工具」——>「工具向导」。见图2,图3。
视觉IMAX的第37篇原创文章
近期对于EPSON机器人建立工具坐标系及TCP通讯知识进行了些简单研究,现将其总结如下。
方法步骤如下:
1、步骤一:开启EPSON机械臂电机,见图1。
2、步骤二:进行戳点示教点位,建立工具坐标系,
打开EPSON的SDK软件界面——>工具——>机器人管理器——>「工具」——>「工具向导」。见图2,图3。
 1594
884
1万+
1594
884
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























