







 超级会员免费看
超级会员免费看
结构:
-
第一部分(原理详解,简洁但数学化)
-
第二部分(代码实现,完整、可执行、注释详实、含训练循环与优化建议)
第一部分:原理详解(浓缩数学推导与理论要点)
本节目标:以可操作的数学形式说明如何把来自不同传感器(典型:LiDAR 点云 + RGB 相机图像)的人造信号对齐、编码与融合,形成可训练的端到端网络。我们关注常见任务——点云的逐点分类/分割(per-point semantic segmentation)或检测,以及多模态特征融合的核心原理。
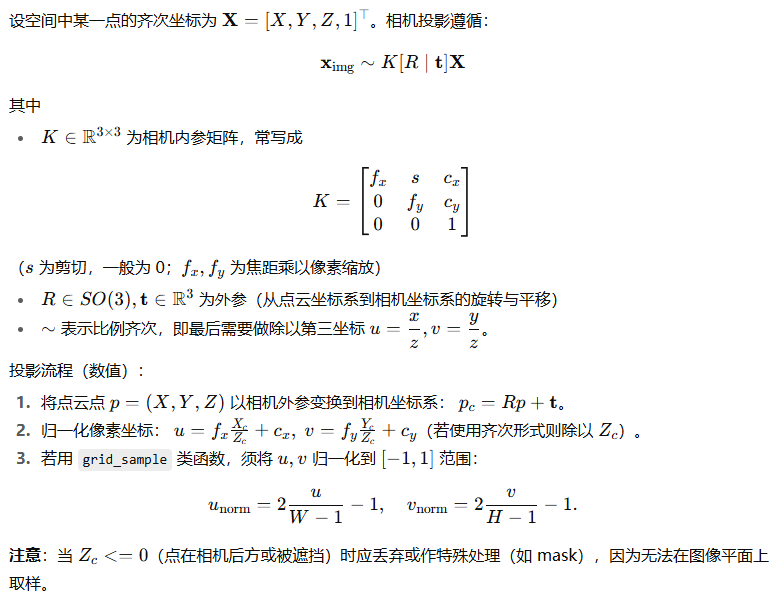
1. 坐标变换与投影(从 3D 点到图像像素)
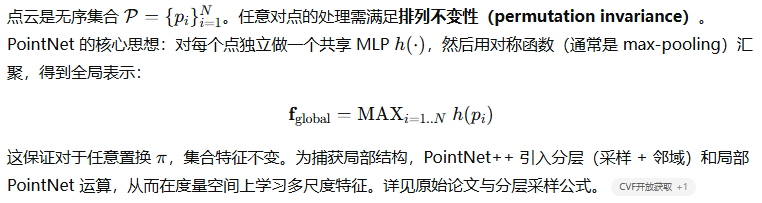
2. 点云编码:集合不变性与 PointNet 家族

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1646
1646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









