




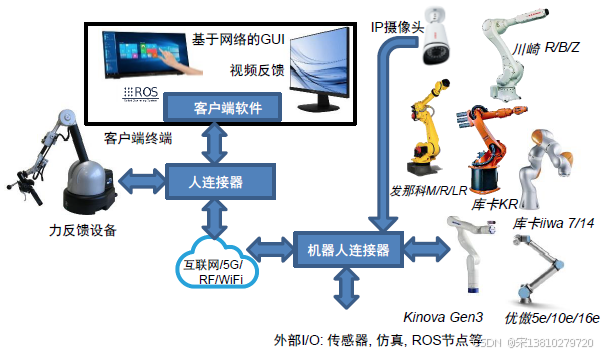
Telerobotics Extender是法国Haption公司推出的一款力反馈遥操作机器人解决方案,又名TREX。Haption的硬件产品可用作主设备,可直观地远程控制机器人。操作员无需在危险区中作业,可灵活操作主机械臂。力反馈技术实现了从机器人对周围环境施加力的检测,从而降低了损坏的风险。该解决方案是基于商业现货技术的方法,是一款性价比高的解决方案,特别适合遥操作机器人和远程维护应用。
产品功能
▪ 力反馈双向控制
▪ 反馈类型: 动态反馈: 惯性、关节限制;交互式反馈: 重量、触碰
▪ 平移和转动离合
▪ 底座旋转可调
▪ 力和移动比例可调
▪ 控制模式间过渡平稳
▪ 安全开关,安全性高
▪ 通信协议安全、高效
▪ 长短距离有线通信;2021年年底将推出无线通信
▪ 多语言图形用户界面
可兼容:Virtuose 6D TAO
可提供:TREX Box + 用户机器人型号License

















 802
802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









