



我们通常用“物面-入瞳-出瞳-像面”来描述光学系统,为了建立一个高度抽象、统一且强大的分析模型。这个模型将所有光学系统的核心功能统一到同一个框架下,将可能由十几片透镜组成复杂的光学结构“黑盒化”,极大地简化了设计、分析和沟通的过程。
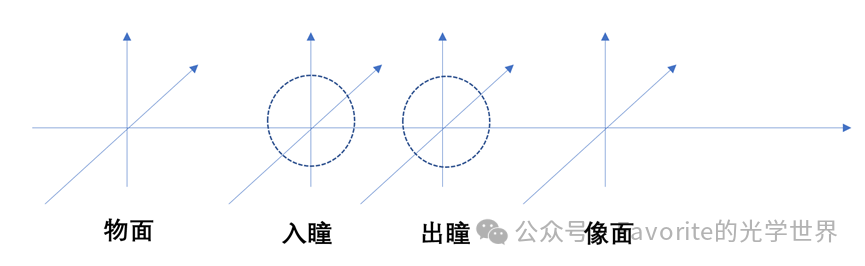
物面:这是光线的起点,是我们要观察或测量的物体所在的理论平面。它代表了信息的源头。
入瞳:这是从物方看过去,孔径光阑所成的像。入瞳决定了有多少光线能从物面发出并进入系统。它是系统在物方的“虚拟窗口”。
出瞳:这是从像方看过去,同一个孔径光阑所成的像。它决定了有多少光线能从系统射出并到达像面。它是系统在像方的“虚拟窗口”。
像面:这是光线的终点,是物面通过光学系统所成的像所在的理论平面。它代表了信息传递的目的地。
入瞳与出瞳都理解都需要正确认识一个概念——孔径光阑:物理上限制进入系统光束粗细的元件(如相机中的光圈叶片)。

这个模型天然地定义了评价光学系统性能的几个最基本参数:
视场:物面上有多大范围可以被成像。它由入瞳的位置和大小以及第一个光学元件的尺寸共同决定。
相对孔径 / F数:决定系统集光能力和分辨率的关键参数。F/# = 焦距 / 入瞳直径。
景深:物体在前后移动时,在像面上仍能保持清晰成像的范围。景深的计算完全依赖于入瞳的直径。
光瞳衔接:在复杂系统中(如显微镜+相机),前一个系统的出瞳必须与后一个系统的入瞳匹配,才能避免光线损失(渐晕)和成像问题。
同时,这个模型为我们提供了分析像差的“坐标系”
孔径相关像差(如球差):与通过入瞳不同高度的光线有关。
视场相关像差(如畸变、彗差):与物点在物面上的不同位置有关
用这个模型来描述光学系统,我们就能抓住所有光学系统共有的“输入-处理-输出”关系,从而为我们设计、分析和交流光学系统提供了一个无比清晰和有效的工具。

在有物理的孔径光阑的情况下,引入“瞳孔/瞳面”(入瞳/出瞳)的概念,正是为了简化分析,提供系统级的视角。对于物体发出的光线来说,它“看不到”系统内部复杂的透镜和光阑,它只“看到”一个虚拟的入瞳。任何能指向入瞳的光线就能进入系统,任何不能指向入瞳的光线就会被阻挡。切记“瞳面”是孔径光阑的“虚拟投影屏幕”,而不是光阑本身,它是光学系统中像差定义和测量的基准面。
如此,我们可以定义一些概念:
物方数值孔径 (NA) :由物点和入瞳边缘的连线角度决定。
视场角 (Field Angle) :由物点中心与入瞳中心的连线角度决定。
波像差(Wavefront Error):实际波前与一个理想球面波前在出瞳面上的光程差。泽尼克多项式(Zernike Polynomials)就是在出瞳这个圆形域上对波像差进行拟合和分解的。

如何理解孔径光阑对孔径角的约束呢?
————————————————————
对于有限远的物体,我们关心的是“从物点出发,能进入系统的最大张角”。
对于无限远的物体,物体发出的光线是平行光。此时,我们关心的是“一束多粗的平行光能被系统接收?” 这个“粗度”的衡量标准,就是系统的入瞳直径。通过直接设定入瞳直径或F数,就等效于约束了系统的孔径角。
如何理解入瞳位置对视场角的定义?
—————————————————————
视场角本质是物点主光线与光轴的夹角。入瞳在物面后方,表示各物点发出的主光线“发散”至入瞳。入瞳在物面前方,则代表主光线在到达物点前已通过入瞳,物点位于入瞳的“光线延长线上”,主光线从物点“反向会聚”至入瞳。无论入瞳在物点前/后,物高与入瞳中心连线始终定义视场角。

在光学设计和分析中,孔径光阑始终被建模为一个平面,即使其物理实体可能是曲面。当我们在光学设计软件中将一个面设置为“光阑”时,软件在计算光线追迹时,只考虑该面的通光孔径在切线平面上的投影。软件在计算入瞳/出瞳的“理想位置”时,使用的是“近轴瞳孔”的概念,而近轴光线本身是没有任何像差的理想化光线。因此,计算出的入瞳/出瞳是一个位置、大小都完全确定的理想化几何平面。而真实的光学系统一定是有像差的,这也就产生了光瞳像差。简单来说,就是系统的“虚拟窗口”本身不是一个完美的、无像差的像。
当存在光瞳像差时,会有入瞳/出瞳形状失真(入瞳或出瞳的像可能不再是规则的圆形,可能会变成椭圆形、彗星状或其他不规则形状)、入瞳/出瞳位置漂移(入瞳的位置会随着视场角的变化而变化,而不是固定在一个点上。意味着对于视场边缘的点,其入瞳发生了移动和变形)及光程差不等(从物点出发,通过这个有像差的入瞳不同部位的光线,到达像面的光程不再相等)的问题存在。

渐晕:由于光学系统中透镜框、光阑等机械元件的遮挡,导致偏离光轴(即视场边缘)的物点发出的光束不能完全通过系统,从而使得成像光束的有效口径随着视场角的增大而逐渐减小的现象。
让我们把这些概念串起来,想象光线是一次跨国旅行:
入瞳是出发机场的护照检查关口,没有护照和签证(光线没指向入瞳),你绝对上不了飞机。但即使你通过了检查(光线指向入瞳),不代表你一定能到达目的地(像面)。飞机可能会故障备降(渐晕)。
孔径光阑可看作是航班的总座位数,它决定了理论上最多有多少人能同时旅行。
渐晕可理解为航行过程中的各种意外,比如某个乘客在转机时被拦下(被透镜框遮挡);飞机遭遇气流被迫抛掉部分行李(能量损失)。
出瞳可理解为目的地机场的入境大厅,所有最终成功抵达的旅客(成像光线),必定是从这个大厅出来的(其反向延长线通过出瞳)。但这个大厅里显示的所有航班信息(完整的出瞳),包含了所有起飞了的航班。有些航班可能中途返航了(被渐晕),这些旅客并没有真正从这里出来。
因此,光线通过入瞳和出瞳是成像的必要不充分条件。

说完了孔径光阑和瞳面,我们再来看看视场光阑和入射窗/出射窗
视场光阑:物理上限制成像范围(视场大小)的机械孔径。它决定了物面(或像面)上有多大区域能最终被看到。光线超过这个范围的物体,其光线会被视场光阑完全阻挡,无法到达最终的像面。
入射窗:视场光阑被其前面的所有光学元件所成的像。如果物点位于入射窗之内,它发出的光线有可能通过系统;如果在外,则肯定被视场光阑遮挡。
出射窗:视场光阑被其后面的所有光学元件所成的像。
引入这两个“窗”的概念,其根本目的与引入“光瞳”的概念完全相同:为了将复杂的光学系统“黑盒化”,建立一个简单、统一的分析模型,从而极大地简化对视场、渐晕和光线限制的分析。对于物空间某个点能否成像,只需判断该物点是否位于入射窗之内。如果在内,则能成像;如果在外,则不能。
Q 对于超表面(特指超透镜)而言,它的入瞳/出瞳在哪?视场角怎么定义?
超透镜自身通常同时充当着“透镜”和“孔径光阑”的双重角色。其物理边界就是限制光束大小的那个孔径。因为它是一个非常薄的元件,其前后几乎没有光学系统来为这个孔径“成像”。因此,超透镜的入瞳和出瞳,在理论上都与其自身的物理孔径平面重合。
超透镜的可用视场角通常是一个性能权衡的结果,而不是一个清晰的几何边界。这是因为超透镜由无数个特定方向的纳米结构(纳米柱)组成。这些结构对光的散射特性具有方向依赖性。当光线以极大的倾斜角入射时,纳米结构无法提供设计所需的相位延迟,导致波前调控失效,成像质量急剧下降(如效率降低、像差增大)。而超透镜的设计通常针对正入射(On-axis)光线优化。离轴(Off-axis)的物点会引入巨大的波像差,特别是彗差(Coma) 和像散(Astigmatism)。这些像差会随着视场角的增大而迅速恶化,使得边缘视场变得模糊不清。因此工程师会定义一个“衍射效率高于某个值(如20%)”或“MTF曲线高于某个对比度”的视场范围作为其有效视场角。
文章转载:Favorite的光学世界
免责声明:转载此文目的在于传递更多信息,仅供读者学习、交流之目的。如有侵权,请联系删除!

















 5463
5463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









