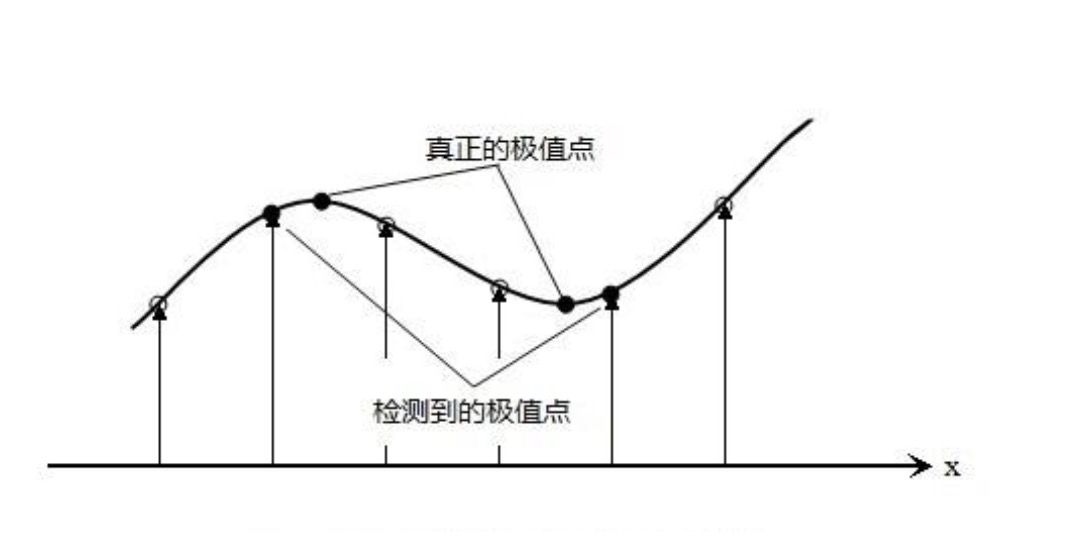
关键点定位 之前的方法检测到的极值点是离散空间的极值点,下面通过拟合三维二次函数来精确确定关键点的位置和尺度,同时去除低对比度的关键点和不稳定的边缘响应点(因为DoG算子会产生较强的边缘响应), 以增强匹配稳定性、提高抗噪声能力。 离散空间的极值点并不是真正的极值点,下图显示了二维函数离散空间得到的极值点与连续空间极值点的差别。利用已知的离散空间点插值得到的连续空间极值点的方法叫做子像素插值(Sub-pixel Interpolation)。 候选特征点x, 其偏移量定义为 Δ \Delta


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了SIFT特征检测过程,包括关键点定位的子像素插值、消除边缘响应和有限差分法求导,以及关键点特征描述的邻域窗口梯度和方向直方图生成。SIFT特征具有旋转、尺度和亮度不变性,适用于图像匹配和识别。然而,SIFT在实时性和特征点数量上存在不足,后续出现了如SURF、ORB等替代方法。
本文详细介绍了SIFT特征检测过程,包括关键点定位的子像素插值、消除边缘响应和有限差分法求导,以及关键点特征描述的邻域窗口梯度和方向直方图生成。SIFT特征具有旋转、尺度和亮度不变性,适用于图像匹配和识别。然而,SIFT在实时性和特征点数量上存在不足,后续出现了如SURF、ORB等替代方法。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2121
2121







