



 该代码示例展示了如何使用OpenCV和线程池来处理多个摄像头的视频流,实现图像抓取和保存。通过调整摄像头参数和使用并发执行来优化读取和保存帧的时间,同时探讨了软同步的可能性,即基于时间戳的帧同步策略。
该代码示例展示了如何使用OpenCV和线程池来处理多个摄像头的视频流,实现图像抓取和保存。通过调整摄像头参数和使用并发执行来优化读取和保存帧的时间,同时探讨了软同步的可能性,即基于时间戳的帧同步策略。
from concurrent.futures import ThreadPoolExecutor
import threading
import cv2
import time
take_from_video_flag = False
quit_flag = False
take_count_once = 20
take_current_count = 0
def get_photo():
cap = cv2.VideoCapture(0)
f, frame = cap.read()
cv2.imwrite('image.jpg', frame)
cap.release()
# tof
def take_pic_from_tof(camera_id):
print("take_pic_from_top:")
def take_pic_from_video(camera_id):
global take_from_video_flag
take_from_video_flag = True
def save_frame(frame, camera_id,index):
format = "%Y_%m_%d_%H_%M_%S"
file_name = str(camera_id) + "_" + \
time.strftime(format, time.localtime()) + "_" + str(index) + ".jpg"
print("file_name:", file_name)
cv2.imwrite("./save/"+file_name, frame)
# cv2.imwrite(file_name, frame)
print("imwrite end:", file_name)
def open_camera(camera_id):
print("opencamera id:", camera_id)
cap = cv2.VideoCapture(camera_id, cv2.CAP_DSHOW)
cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
if not cap.isOpened():
print("Cannot open camera")
exit()
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1024)
cap.set(cv2.CAP_PROP_FPS, 30)
# cap.set(cv2.CAP_PROP_BRIGHTNESS, 1)
# cap.set(cv2.CAP_PROP_CONTRAST,40)
# cv2无法设置fps,但我可以用以下方式更改fps
fps = cap.get(cv2.CAP_PROP_FPS)
print("fps:", fps)
width = cap.get(cv2.CAP_PROP_FRAME_WIDTH)
print("width", width)
height = cap.get(cv2.CAP_PROP_FRAME_HEIGHT)
print("height", height)
timestamp_from_start = cap.get(cv2.CAP_PROP_POS_MSEC)
print("timestamp_from_start", timestamp_from_start)
return cap
def save_pic_with_thread(frame, camera_id,index):
t = threading.Thread(target=save_frame(frame, camera_id,index))
t.start()
def main():
global take_from_video_flag
global take_count_once
global take_current_count
pool = ThreadPoolExecutor(max_workers=1)
cap0 = open_camera(0)
time.sleep(3)
cap1 = open_camera(1)
cv2.namedWindow("camera0", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.namedWindow("camera1", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.resizeWindow("camera0",320,256)
cv2.resizeWindow("camera1",320,256)
while True:
start_time = time.time()
cap0.grab()
cap1.grab()
# read_code, frame = cap0.read()
# read_code2, frame1 = cap1.read()
read_code, frame = cap0.retrieve()
read_code2, frame1 = cap1.retrieve()
if not read_code or not read_code2:
break
read_time = (time.time() - start_time)*1000
print("read time :",read_time)
cv2.imshow("camera0", frame)
cv2.imshow("camera1", frame1)
if take_from_video_flag:
pool.submit(save_pic_with_thread,frame,0,take_current_count)
pool.submit(save_pic_with_thread,frame1,1,take_current_count)
# save_pic_with_thread(frame=frame, camera_id=0,index=take_current_count)
# save_pic_with_thread(frame=frame1, camera_id=1,index=take_current_count)
# if(take_current_count <= take_count_once):
# take_from_video_flag = True
# take_current_count = take_current_count+1
# else:
# take_current_count = 0
# take_from_video_flag = False
if cv2.waitKey(1) == ord('s'):
print("save_pic: main")
take_from_video_flag = True
# save_frame(frame, 0)
# save_frame(frame1, 1)
elif cv2.waitKey(1) == ord('q'):
print("quit: main")
break
print("quit: destroy")
cap0.release()
cap1.release()
pool.shutdown()
cv2.destroyAllWindows()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
UVC 负载数据头 Payload Header Information-摄像头数据包格式分析 - USB中文网
由于 opencv 上层api封装 无法真正获取uvc协议层 一些原始信息
理论上 软同步基于 时间戳 可控制 偏差在固定帧差内 (待进一步研究))
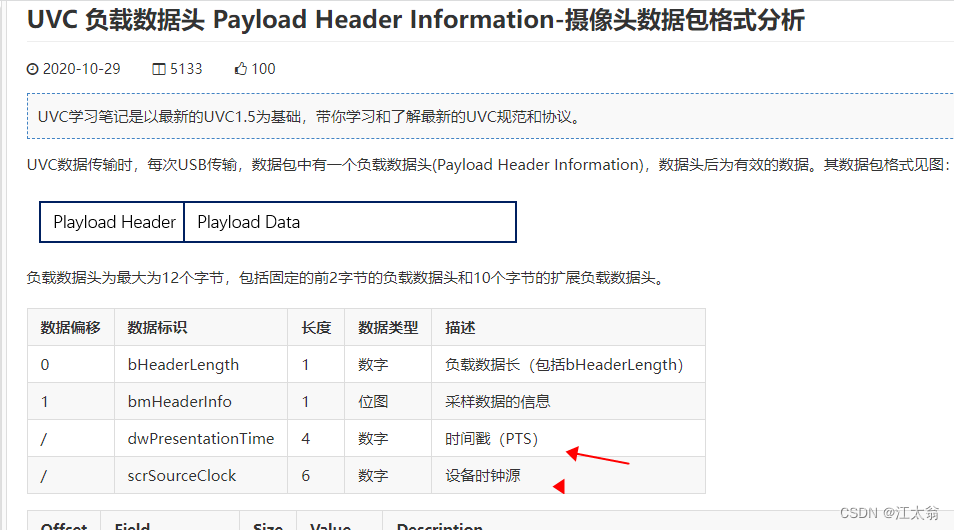
可通过 usb抓包工具分析 多路摄像头 传入 iso 同步传输时每一帧数据包 中负载信息 确定每一路帧规律 确定软同步方案

















 1040
1040

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









