



一、背景
Robotic Intelligence and Automation是一本关于机器人智能和自动化的最新理论和应用的期刊。之前的名称为Assembly Automation,后来改为了Robotic Intelligence and Automation。目前为中科院SCI4区,影响因子4.4,乔红院士为该期刊主编,采用双盲评审。
期刊官网:RIA官网
我花了俩小时浏览了期刊官网的所有内容,都没有找到该期刊投稿的latex模板,所以这里记录一下投稿须知。
二、Author guidelines
关于作者指南,这里只例举关键信息
1.Author responsibilities
大致意思,在论文评审和出版过程中,作者需要迅速响应编辑的要求。
2.Open access submissions and information
这个期刊的好处是可以选择gold open access 或 green open access.
gold open access:也就是需要支付文章处理费 APC (article processing charge),价格因期刊而异。
green open access:这个是免费的
3.重要的来了,Prepare your submission
1):Format:文章文件应以Microsoft Word格式提供,且提交相应的PDF,但单独提交PDF是不可接受的。LaTeX文件也可以使用,但前提是提供随附的PDF。
这一点就比较离谱,推荐用word,也可以使用latex,但都没有给出相应的模板。
2):Article length / word count:文章的长度应在3000到7000字之间。这包括所有文本,例如结构化摘要、参考文献、表格中的所有文本以及图表和附录。
每个图或表限制在250字。
3):Article title:应提供措辞简洁的标题。
4):Author details:因为期刊是双盲评审,所以手稿中不应出现作者的任何信息,但在投稿时,需要填写作者,所有作者的姓名应添加到ScholarOne提交的材料中;并按照希望发表的顺序列出它们。每位作者都需要有自己的ScholarOne帐户,期刊将从中提取以下详细信息:
作者电子邮件地址(机构优先)。
作者姓名。期刊将精确地复制它,因此必须包括他们想要的任何中间名和/或首字母缩写。
在多作者论文中,重要的是列出所有对论文做出重大贡献的作者。那些提供支持但没有为研究做出贡献的人应该在致谢部分列出。你永远不应该包括那些没有为论文做出贡献或不想参与研究的人。
5):Biographies and acknowledgements传记和致谢:如果要包含这些项目,请将它们保存在单独的Microsoft Word文档中,并将文件与您的提交文件一起上传。如果包括在内,应为每位指定作者提供不超过100字的简短专业传记。
6):Research funding:你的文章必须在致谢部分引用所有外部研究资金来源。你应该描述资助者或财务赞助商在从研究设计到提交的整个研究过程中的作用。
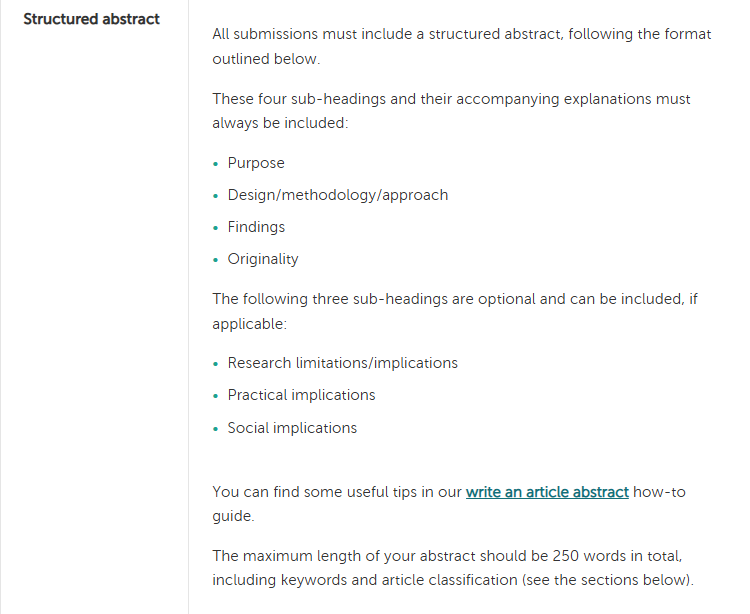
7):Structured abstract:
所有提交的材料必须包括一份结构化摘要,格式如下。
必须始终包括这四个子标题及其附带的解释:
目的
设计/方法/途径
研究结果
原创性
以下三个子标题是可选的,如果适用,可以包括在内:
研究局限性/影响
实际意义
社会影响
你可以在我们的文章摘要指南中找到一些有用的提示。
摘要的最大长度应为250字,包括关键字和文章分类。
8):Keywords:
您的提交内容应包含多达12个适当且简短的关键字,以捕捉论文的主要主题。我们的创建SEO友好的手稿指南包含了一些关于选择搜索引擎友好关键字的实用指南。
请注意,虽然我们将始终尝试使用您建议的关键字,但内部编辑团队可能会用匹配的术语替换其中的一些关键字,以确保出版物之间的一致性并提高您文章的可见性。
9):Article classification:
一般选择Original Article
10):Headings标题:
文章标题必须简洁明了,明确指出所需的层次结构。
首选格式是第一级标题用粗体,后续子标题用中斜体。
11):Notes/endnotes:
注释或尾注仅在绝对必要时使用。它们应在文本中用方括号内的连续数字标识。然后,这些数字应该在文章末尾列出并解释。
12):Figures:
所有的图(图表、示意图、线条图、网页/截图和照片)应以电子方式提交。彩色和黑白图片都可以。
需要注意的是:
所有图片应以尽可能高的分辨率/质量提供,数字和文本应清晰易读。
可接受的格式有.ai、.eps、.jpeg、.bmp和.tif。
在其他应用程序中创建的电子图形应以原始格式提供,也应复制并粘贴到空白的MS Word文档中,或以PDF文件的形式提交。
所有图片应使用阿拉伯数字连续编号,并有清晰的标题。
所有照片应编号为1、2、3等,并有清晰的标题。
如果您已获得使用该图/表的许可,则所有图/表标题应包括必要的信用额度、确认或归因;如果图/表是作者的财产,应在标题中注明。
类似下面的这样:
13):Tables:
表格应打印出来,并以单独的文件提交给文章的正文。每张表格的位置应在文章的主体中清楚地标明,相应的标签应在表格文件中清楚地显示出来。表格应使用罗马数字连续编号(例如I、II等)。
给每张表一个简短的标题。确保在相关项目旁边显示任何上标或星号,并将解释作为表格、图表或铭牌的脚注显示。
14):Supplementary files:一般用不到。
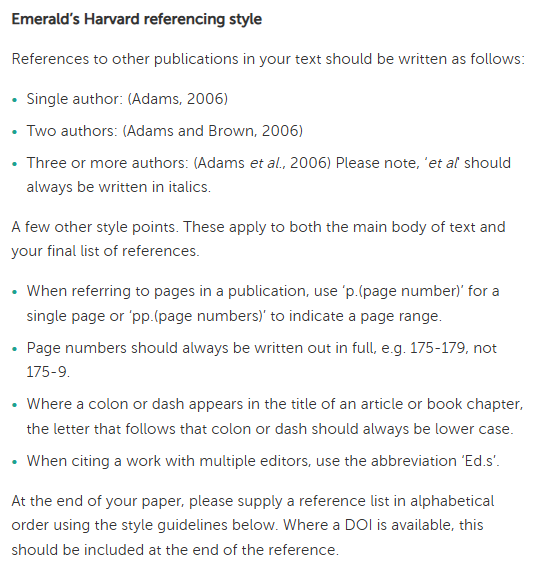
15):References:手稿中的所有参考文献必须使用公认的哈佛风格之一进行格式化(Emerald’s Harvard referencing style)。欢迎您使用Emerald采用的哈佛风格——我们在下面提供了详细的指南。想用不同的哈佛风格吗?没关系,如果你的手稿被接受,我们的排版人员会对它进行任何必要的修改。请确保您检查所有引文的完整性、准确性和一致性。例如:


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









