




在汽车电子MBD开发中,TSMaster MBD模块深度集成于TSMaster先进的总线分析、仿真与测试平台,旨在为工程师提供一套从模型自动编译、代码集成到自动化测试的端到端无缝解决方案。本文将手把手教您从零搭建工程并构建高效测试流程,为优化开发工作流提供实用指南。
本文关键词:TSMaster,MBD
目录
Catalog
5. MBD模型
6. MBD工程搭建与解析
7. MBD工程结果
8. 组件相关
5、MBD 模型
5.1 Simulink模型
从MATLAB官网中下载RollAxisAutopilot.slx(网址1)和RollAxisAutopilotHarness.slx(网址2)文件
网址1:
https://ww2.mathworks.cn/help/ecoder/gs/getting-started-with-embedded-coder.html;
网址2:
https://ww2.mathworks.cn/help/ecoder/gs/compare-model-simulation-and-generated-code-results.html
5.1.1 RollAxisAutopilot模型介绍
5.1.1.1 关于模型
该模型显示了为代码生成而设计的横滚轴自动驾驶仪控制系统的实现。
该模型代表了一种基本的滚转轴自动驾驶仪,具有两种操作模式:滚转姿态保持和航向保持。这些模式的模式逻辑在此模型之外。模型架构将航向保持模式和基本横滚姿态功能表示为原子子系统。
横滚姿态控制功能是一个PID控制器,它使用横滚姿态和横滚率反馈来产生副翼指令。
控制器的输入是基本横滚角参考或横滚命令,以跟踪所需的航向。模型如下:
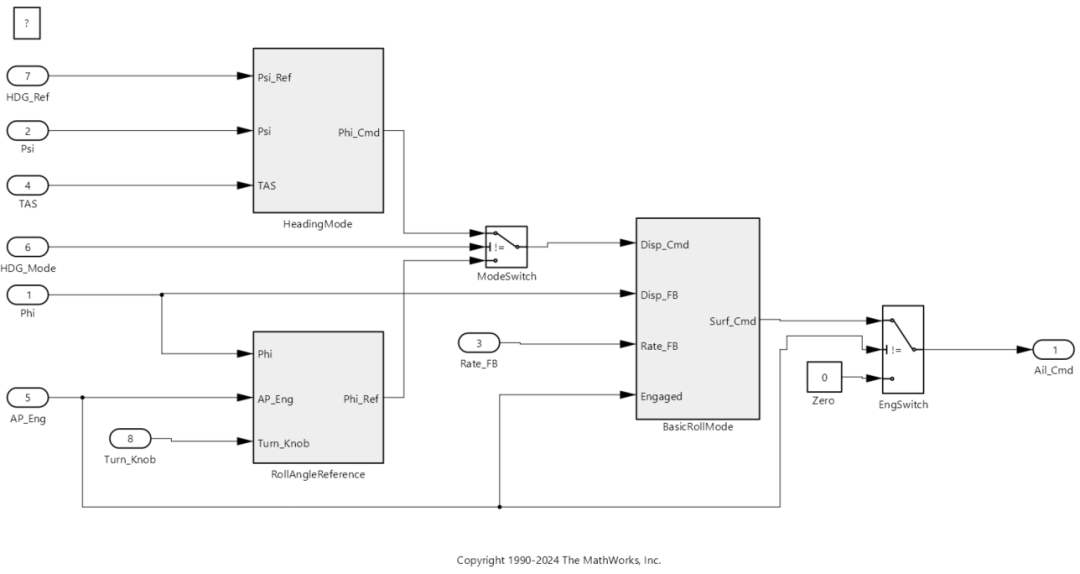
图18: RollAxisAutopilot示意图
5.1.1.2 RollAxisAutopilot/RollAngleReference
基本侧倾角参考计算作为子系统RollAngleReference实现。
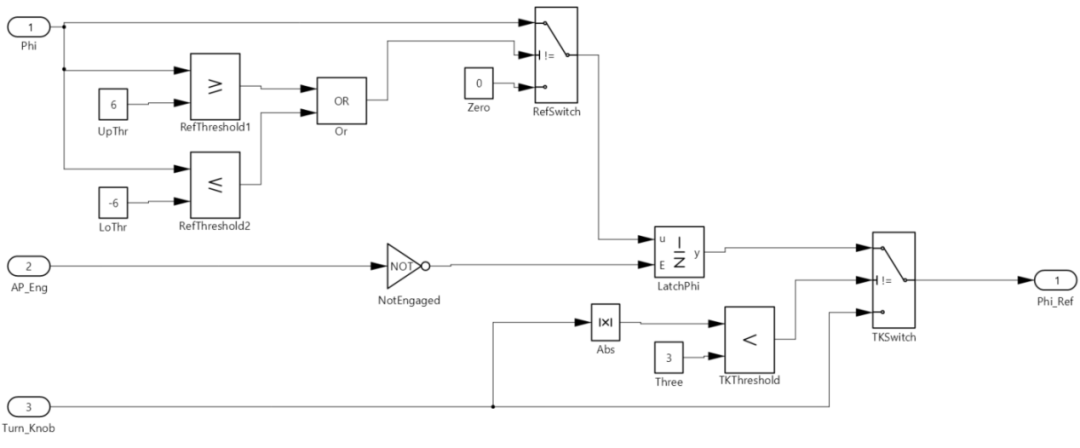
图19:RollAxisAutopilot/RollAngleReference示意图
5.1.1.3 RollAxisAutopilot/HeadingMode
子系统HeadingMode计算横滚指令以跟踪所需的航向。

图20: RollAxisAutopilot/HeadingMode示意图
5.1.1.4 RollAxisAutopilot/BasicRollMode
子系统BasicRollMode计算侧翻姿态控制函数(PID)。
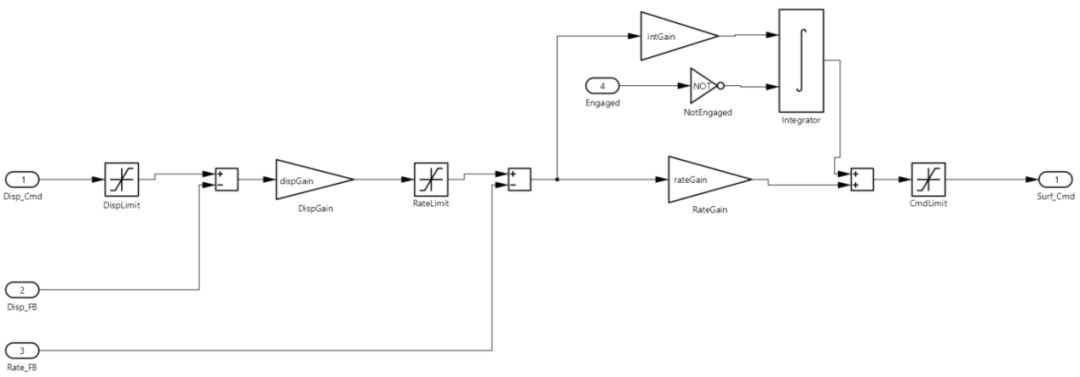
图21: RollAxisAutopilot/BasicRollMode示意图
5.1.2 模型导入
将RollAxisAutopilotHarness.slx文件拖拽到TSMaster中,模型会直接被加载到模型框图中如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1007
1007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











