




 本文介绍了如何使用一键脚本快速安装ROS1在Ubuntu 18.04上,并处理了WSL中的可视化问题,包括安装VCXSRV、配置DISPLAY环境以及解决GLRendererStarted错误。重点讨论了LIBGL_ALWAYS_INDIRECT设置对rviz的影响及解决方案。
本文介绍了如何使用一键脚本快速安装ROS1在Ubuntu 18.04上,并处理了WSL中的可视化问题,包括安装VCXSRV、配置DISPLAY环境以及解决GLRendererStarted错误。重点讨论了LIBGL_ALWAYS_INDIRECT设置对rviz的影响及解决方案。
1 一键安装ros
因为要用ros1,所以我这里用的是ubuntu18.04
直接用鱼老师的一键安装ros脚本,省去了被墙的烦恼。
不想切换页面的话可以直接输入这行代码到终端:wget http://fishros.com/install -O fishros && . fishros
按照操作选择即可,推荐先选择更换系统源和第三方源以后在继续安装,后续根据系统选择ros版本即可。
看到小鱼老师提示的ros安装完成基本就是没有问题了。可以用roscore看下是否会有相关信息输出。如果有就是一切正常。
2 wsl->windows可视化
众所周知,wsl是没法显示界面的,但是一些可视化的操作又必须要做,难道要放弃wsl了吗,不不不,我还想好好用我的微信,玩我的lol!
首先我们在windows上安装上VCXSRV,为什么装这个?问就是我看的教程都这样oo。
点击download即可。打开可执行文件:
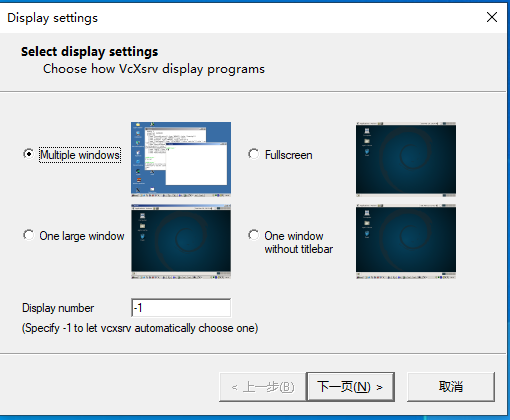
下一步选择start no client
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 701
701





 到【灌水乐园】发言
到【灌水乐园】发言









