




一、封装的作用
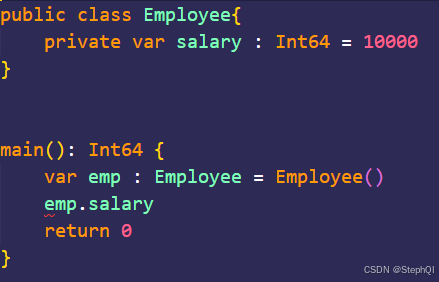
提高数据访问的安全性。使用访问修饰符private进行修饰。
在类中,如果成员变量或者成员函数等被private修饰后,便不能直接通过创建对象来进行访问,只能通过特定的方法进行访问。
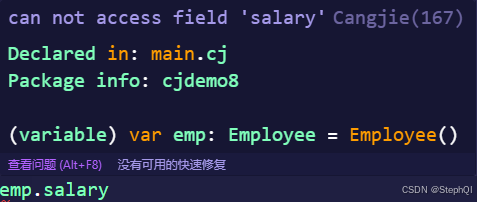
错误提示中can not access field 'salary',说明不能通过创建对象进行访问。
注意:不能直接访问不代表不能访问,正是因为需要通过特定的方法进行访问,所以说封装可以提高数据访问的安全性。
二、访问的方法
1、通过函数方法来进行访问
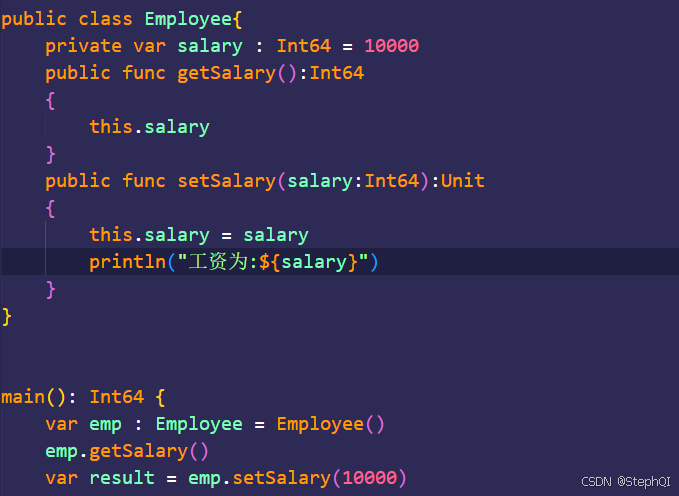

根据程序运行结果,通过函数方法访问到了用private修饰的salary成员变量。
2、通过属性设计器来进行访问
属性设计器语法:
prop 名字 :类型{ }
注意:要使用set进行设置必须要在prop前加上mut
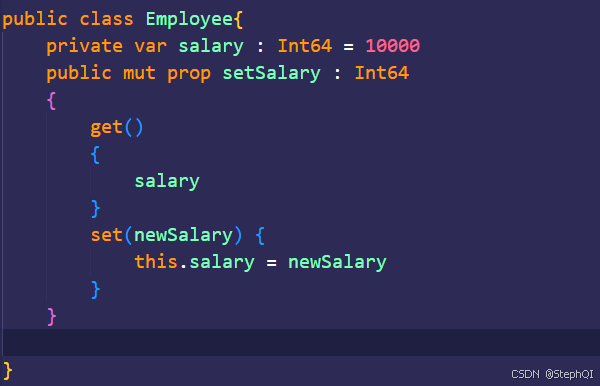
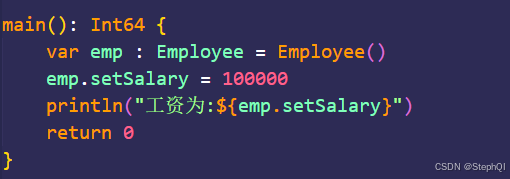

由此可见,通过属性设计器成功的访问到用private修饰的成员变量。
总结:
仓颉通过封装机制实现了数据访问的精细控制、实现细节的透明化、系统安全性显著提升,合理运用封装能使系统具备更强的健壮性和扩展性。

















 2566
2566

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









