




一、数据集准备
- 数据集下载:使用pytorch的处理图像视频的torchvision工具集直接下载MNIST的训练和测试图片
- torchvision:torchvision包含了一些常用的数据集、模型和转换函数等等,比如图片分类、语义切分、目标识别、实例分割、关键点检测、视频分类等工具
- 图片以字节形式存储
- 训练和测试时使用torch.utils.data.DataLoader加载
- 要可见图片,使用pytorch自带工具转换文件为jpg和txt(参考文末文章链接中代码)
- 预处理
二、定义网络
-
网络结构:输入层->卷积层->激活函数->池化->全连接层
(在使用ReLU激活函数时)- 选择最大池化,激活和池化两种顺序结果相同
- 选择平均池化,激活在池化之前,保留的有效特征更多
-
卷积层计算:
- feature map大小计算:(Cin-KernalSize-2*Padding)/Stride+1
- Input层:Cin=channel数,Cout=本层filter数
- 其他层:Cin=上一层filter数,Cout=本层filter数
-
参数计算:
- 卷积层:Cout*(Kernalw*Kernalh*Cin)+bias
- 池化层:不需要参数控制
- 全连接层
-
输入层;
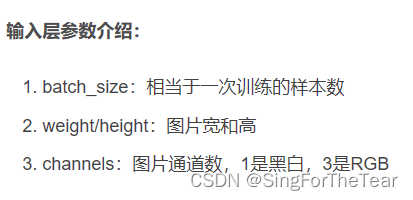
-
卷积层:
- 卷积核大小:越小越好,参数数量降低,用多个小卷积核可以与大卷积核一样的输出大小
- 卷积核个数:等于输出channel数,数量越多提取的特征种类越多,通常为2n个
- 卷积层层数:多次尝试
三、定义损失和优化器
二、代码
#导入包
import torch
from torch.autograd import Variable #获取变量
from torch.utils.data import DataLoader #获取迭代数据
import torchvision
from torchvision.datasets import mnist #获取数据集
import torch.optim as optim
PATH="D:/softwareDocument/CNN/Data/" #数据集位置
ROOT="D:/softwareDocument/CNN/model.pt"
BATCH_SIZE=64
EPOCHS=3
LEARNING_RATE=0.001
MOMENTUM=0.9
RANDOM_SEED=1
torch.manual_seed(RANDOM_SEED)
#1.数据集准备
#下载
#transform= torchvision.transforms.Compose(
# [torchvision.transforms.ToTensor(),
# torchvision.transforms.Normalize(mean=[0.5],std=[0.5])]
# )
train_data = torchvision.datasets.MNIST(
root=PATH,#保存路径
train=True,#为表示是训练数据
transform=torchvision.transforms.ToTensor(),
download=True
)
test_data = torchvision.datasets.MNIST(
root=PATH,#保存路径
train=False,#为表示是训练数据
transform=torchvision.transforms.ToTensor(),
download=True
)## 下载完成后会生成四个压缩包
# 预处理
train_load = DataLoader(dataset=train_data,batch_size=BATCH_SIZE,shuffle=True)
test_load = DataLoader(dataset= test_data,batch_size=BATCH_SIZE,shuffle=True)
#2.定义网络结构
class MyCNN(torch.nn.Module):
def __init__(self):
super(MyCNN,self).__init__()
self.layer1=torch.nn.Sequential(
torch.nn.Conv2d(in_channels=1,out_channels=10,kernel_size=5,stride=1,padding=0),
torch.nn.MaxPool2d(2),
torch.nn.ReLU(),
)
self.layer2=torch.nn.Sequential(
torch.nn.Conv2d(in_channels=10,out_channels=20,kernel_size=5,stride=1,padding=0),
torch.nn.MaxPool2d(2),
torch.nn.ReLU(),
)
self.fc=torch.nn.Linear(20*4*4,10)
def forward(self,input):
layer1_out=self.layer1(input)
layer2_out=self.layer2(layer1_out)
layer2_out=layer2_out.view(x.size(0),-1)
out=self.fc(layer2_out)
return out
model = MyCNN()
#3.定义损失和优化器
loss_func = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(),lr=LEARNING_RATE,momentum=MOMENTUM)
#4.训练
train_loss=[]
for epoch in range(EPOCHS):
running_loss=0.0
for i,(x,y) in enumerate(train_load):
batch_x = Variable(x)
batch_y = Variable(y)
optimizer.zero_grad()# 清空上一次更行参数
out = model(batch_x)
loss=loss_func(out,batch_y)
loss.backward()# 反向传播计算更新值
optimizer.step()#更新
running_loss += loss.item()
if i%64 == 0:
print('[%d,%5d] loss:%.3f' % (epoch,i,running_loss/100))
running_loss = 0.0
train_loss.append(loss.item())
print('Finished Training')
#模型保存
torch.save(model,ROOT)
#5。测试
correct = 0
total = 0
for epoch in range(EPOCHS):
for i,(x,y) in enumerate(test_load):
test_x=Variable(x)
test_y=Variable(y)
out=model(test_x)
pred=torch.max(out,1)[1]
if pred.numpy().all() == test_y.numpy().all():
correct +=1
total +=1
# accuracy = torch.max(out,1)[1].numpy()== test_y.numpy()
print('epoch: ',epoch)
print('accuracy:\t',correct/total)
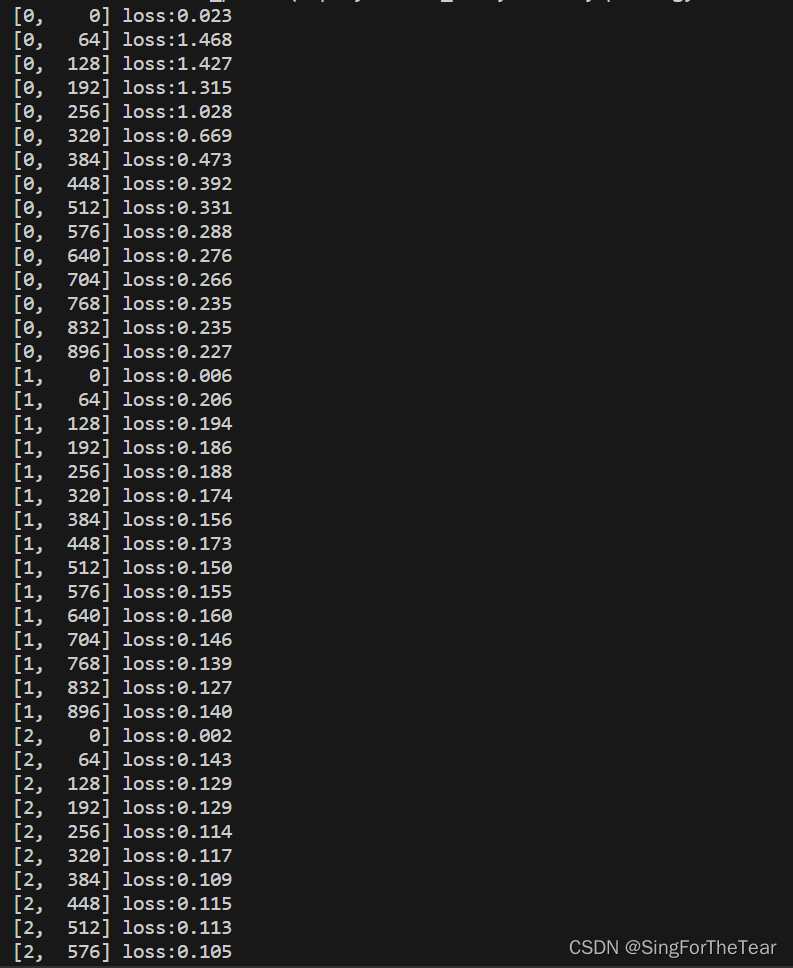
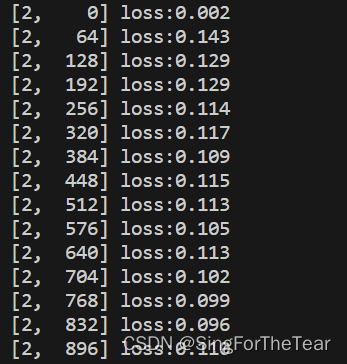
训练:
测试:




















 24万+
24万+




 到【灌水乐园】发言
到【灌水乐园】发言







