




 本文介绍了基于Simulink的模糊自适应PID控制器,通过误差e和误差变化率ec进行模糊推理,调整PID参数以满足不同控制需求。模糊控制器包括去模糊化、模糊推理和去模糊三个部分,通过三角形隶属度函数等进行模糊推理,并展示了MATLAB 2022a的仿真结果。
本文介绍了基于Simulink的模糊自适应PID控制器,通过误差e和误差变化率ec进行模糊推理,调整PID参数以满足不同控制需求。模糊控制器包括去模糊化、模糊推理和去模糊三个部分,通过三角形隶属度函数等进行模糊推理,并展示了MATLAB 2022a的仿真结果。
目录
1.算法概述
模糊自适应PID控制是在PID算法的基础上,以误差e和误差变化率ec作为输入,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整,来满足不同时刻的e和ec对PID参数自整定的要求。PID控制有着原理简单,使用方便,适应性强的特点,同时具有制时精度低、抗干扰能力差等缺点,模糊自适应PID控制是在PID算法的基础上,以误差e和误差变化率ec作为输入,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整,来满足不同时刻的e 和ec 对PID参数自整定的要求。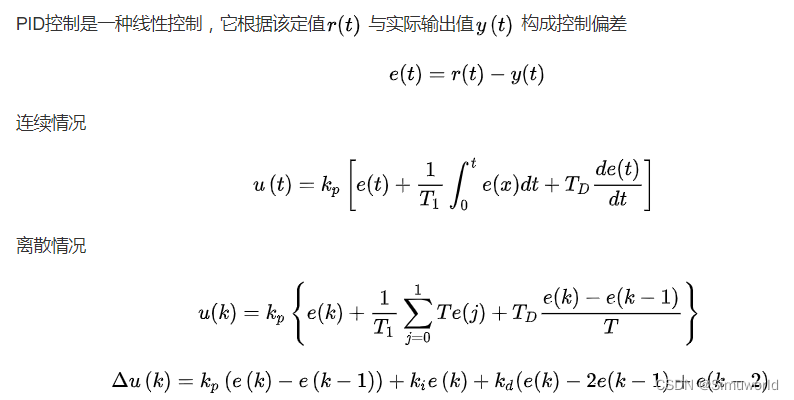 模糊自适应PID控制,以误差e和误差变化率ec作为输入,可以满足不同时刻e和ec对PID参数自整定的需求。利用模糊规则对PID参数进行修改,便是模糊自适应PID控制的结构。
模糊自适应PID控制,以误差e和误差变化率ec作为输入,可以满足不同时刻e和ec对PID参数自整定的需求。利用模糊规则对PID参数进行修改,便是模糊自适应PID控制的结构。
模糊PID控制流程如下图所示,把目标值 Xtarget 与输出值 Xout 的误差 e 与 e 的变化率 de/dt 作为模

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5131
5131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











