




知识点回顾:
1.预训练的概念
2.常见的分类预训练模型
3.图像预训练模型的发展史
4.预训练的策略
5.预训练代码实战:resnet18
作业:
1.尝试在cifar10对比如下其他的预训练模型,观察差异,尽可能和他人选择的不同
2.尝试通过ctrl进入resnet的内部,观察残差究竟是什么
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torchvision.models import resnet18, densenet121
from torchsummary import summary # 查看模型结构
import matplotlib.pyplot as plt
# 设备配置
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# CIFAR10 数据预处理
transform = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
train_set = datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
test_set = datasets.CIFAR10(root='./data', train=False, download=True, transform=transforms.ToTensor())
train_loader = torch.utils.data.DataLoader(train_set, batch_size=128, shuffle=True)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=128, shuffle=False)
class DenseNetC10(nn.Module):
def __init__(self, num_classes=10):
super(DenseNetC10, self).__init__()
# 压缩原版 DenseNet121,减少层数和通道数
self.features = nn.Sequential(
nn.Conv2d(3, 32, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
# 3个密集块,每个块含3层
self._make_dense_block(32, 32, num_layers=3),
self._make_dense_block(64, 32, num_layers=3),
self._make_dense_block(96, 32, num_layers=3),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.AdaptiveAvgPool2d((1, 1))
)
self.classifier = nn.Linear(128, num_classes)
def _make_dense_block(self, in_channels, growth_rate, num_layers):
layers = []
for _ in range(num_layers):
layers.append(nn.Conv2d(in_channels, growth_rate, kernel_size=3, padding=1, bias=False))
layers.append(nn.BatchNorm2d(growth_rate))
layers.append(nn.ReLU(inplace=True))
in_channels += growth_rate
return nn.Sequential(*layers)
def forward(self, x):
features = self.features(x)
out = features.view(features.size(0), -1)
out = self.classifier(out)
return out
# 初始化模型
models = {
'DenseNet-C10': DenseNetC10().to(device),
'MobileViT': MobileViT().to(device),
'RepVGG': RepVGG().to(device),
'ResNet18': resnet18(pretrained=False, num_classes=10).to(device) # 对比基准
}
# 训练超参数
criterion = nn.CrossEntropyLoss()
accuracies = {}
for model_name, model in models.items():
print(f'\nTraining {model_name}...')
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9, weight_decay=5e-4)
scheduler = optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max=200)
best_acc = 0.0
for epoch in range(1, 201):
train_model(model, criterion, optimizer, epoch)
acc = test_model(model, criterion)
if acc > best_acc:
best_acc = acc
accuracies[model_name] = best_acc
# 打印对比结果
print('\nFinal Accuracy Comparison:')
for name, acc in accuracies.items():
print(f'{name}: {acc:.2f}%')
def visualize_residual(model, data):
# 注册钩子函数捕捉残差块输出
residuals = []
def hook(module, input, output):
residual = output - input[0] # 残差 = 输出 - 输入
residuals.append(residual.detach().cpu())
# 选择ResNet18的第一个残差块(layer1[0])
model.layer1[0].register_forward_hook(hook)
with torch.no_grad():
model(data.to(device))
# 可视化残差图(取第一个样本的第一个通道)
residual = residuals[0][0, 0, :, :] # 形状(32,32)
plt.figure(figsize=(6, 4))
plt.subplot(1, 2, 1)
plt.imshow(data[0].permute(1, 2, 0)) # 原始图像
plt.title('Input Image')
plt.subplot(1, 2, 2)
plt.imshow(residual, cmap='coolwarm') # 残差热力图
plt.title('Residual Map')
plt.colorbar()
plt.show()
# 测试残差可视化(用ResNet18和测试集中的一张图像)
resnet_model = resnet18(num_classes=10).to(device)
data, _ = next(iter(test_loader))
visualize_residual(resnet_model, data[:1]) # 取第一个样本
使用ResNet50模型,结果
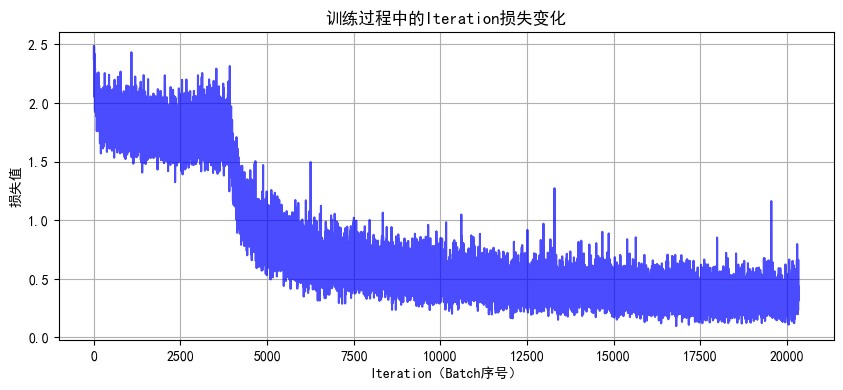
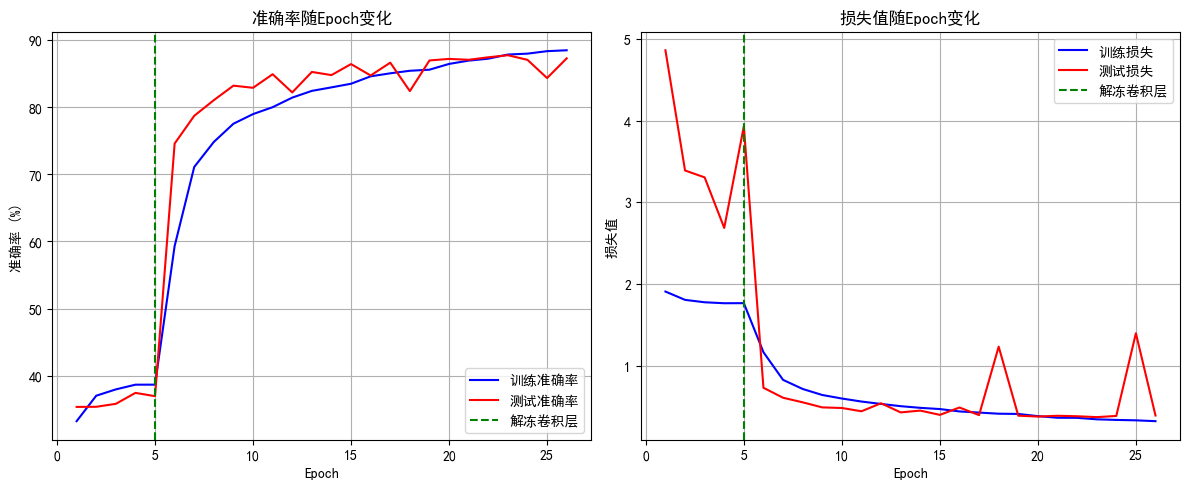
最终模型训练最佳测试准确率为88.05%

















 1365
1365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









