







目录
在学习卷积神经网络之前,学习了全连接神经网络,但是全连接神经网络存在一些缺点,并不足以完成大多数深度学习的项目。为了克服这些缺点,学习卷积神经网络。
全连接神经网络缺点
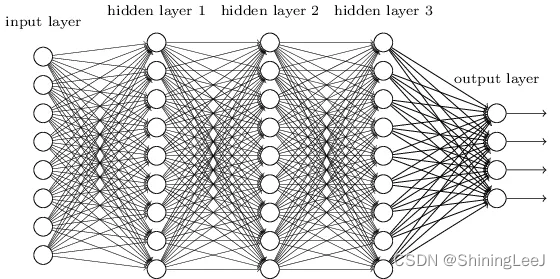
(1)首先将图像展开为向量会丢失空间信息;
(2)其次参数过多效率低下,训练困难;
4 Layer(784, 256, 256, 256, 20) 总共有336896个参数,而这仅仅算是一个多层感知机的结构,还达不到深度神经网络的地步。

在边缘计算场景之中,使用的边缘计算盒子往往没有我们在训练时使用的计算机性能好,导致效率低下。
(3)同时大量的参数也很快会导致网络过拟合。
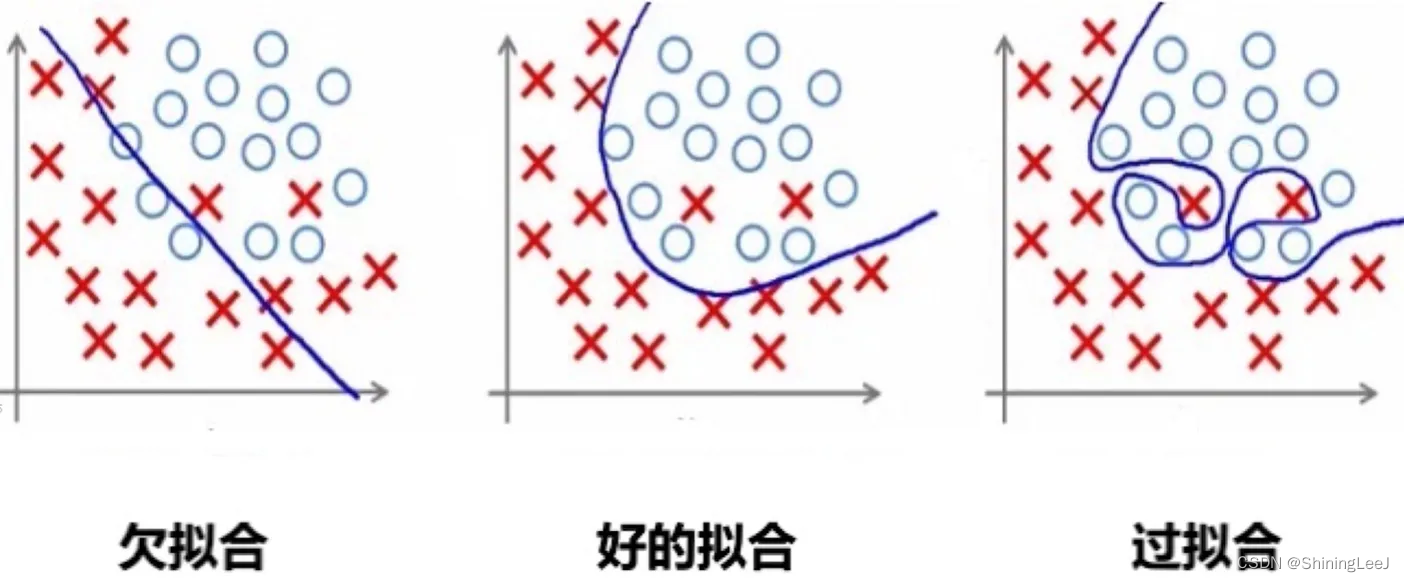
模型在训练时过于追求把损失降到最低,当此模型测试时,损失反而变高。说明该模型泛化能力差,不能适应训练集以外的其他数据。
举个例子:
现在训练一个模型来识别狗狗,训练的数据恰好全是哈士奇的图片,结果多次迭代后把哈士奇的全部特点都识别成狗狗特有的。这样如果我去识别一只金毛的时候则无法识别。这就是过拟合。
解决办法:
1、训练集增加更多的数据(数据增强)
2、降低模型的复杂度
卷积神经网络缺点
卷积结构可以有效的减少深层神经网络所占用的内存量,有效的减少参数的个数,缓解模型的过拟合问题。主要是通过以下三个操作加以实现:
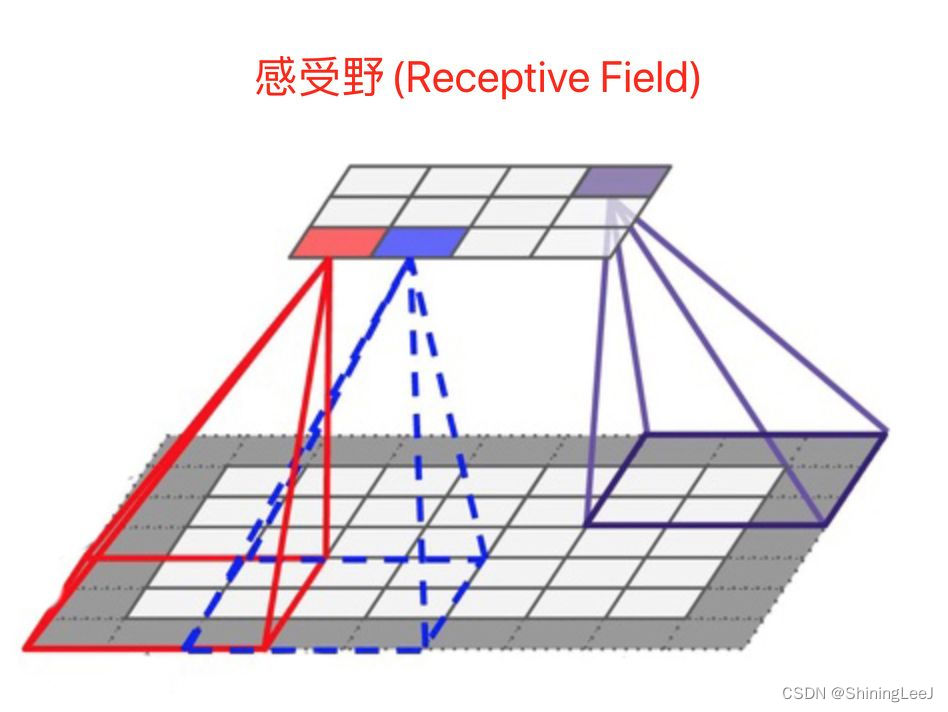
局部感受野
在卷积神经网络中,感受野是指特征图上的某个点能看到的输入图像的区域,即特征图上的点是由输入图像中感受野大小区域的计算得到的。
神经元感受野的值越大表示其能接触到的原始图像范围就越大,也意味着它可能蕴含更为全局,语义层次更高的特征;相反,值越小则表示其所包含的特征越趋向局部和细节。因此感受野的值可以用来大致判断每一层的抽象层次。
权值共享
给一张输入图片,用一个卷积核去扫描这张图,卷积核里面的数就叫权重,这张图每个位置是被同样的卷积核扫的,所以权重是一样的,也就是共享。其实就是一张图片使用同一个卷积核内的参数。
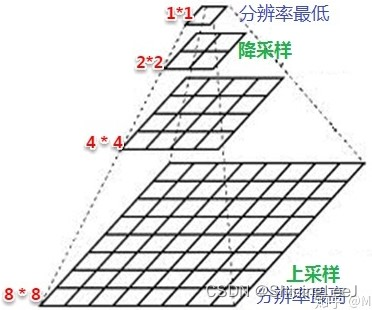
池化层
池化的本质是下采样:压缩数据和参数的数量。
1、特征不变形:池化操作使模型更加关注是否存在某些特征,而不是特征的具体位置。
2、特征降维:在空间范围内做了维度约减,从而使模型可以抽取更加广泛的特征,也减小了下一层的输入大小,减少参数量。
3、防止过拟合,方便优化。对于这点,如上面过拟合所描述的,模型学到了太多不应该去学到的东西,而池化层将这些不应该学习的东西给减少掉。
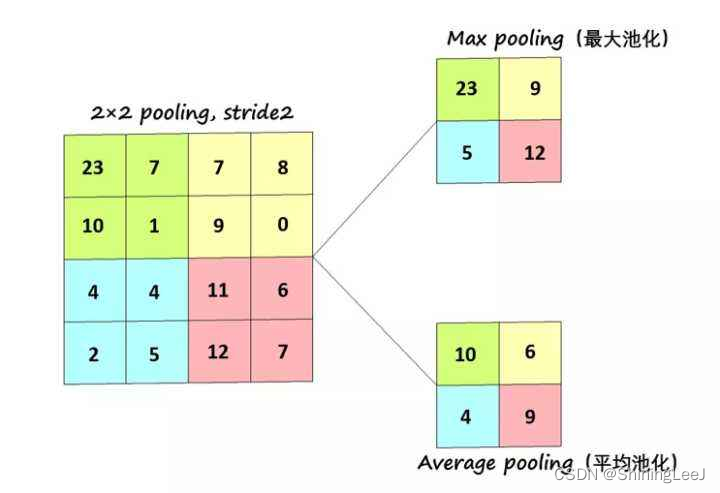
1.最大池化一般用在网络的浅层
2、平均池化用在浅层和深层均可,使用较少(因为改变了原始特征,产生了新的特征)。
卷积神经网络与全连接神经网络的对比
参数量:
卷积神经网络是权值共享,参数较少;(卷积的参数主要是需要控制通道数)
全连接的参数(W)是由输入数据决定的,参数非常冗余(仅参数就可占整个网络参数80%左右)。
全连接的W多,卷积的W少。
通道:
全连接神经网络是NV结构,没有通道(C);
卷积神经网络通道(C)会逐渐增多,HW会逐渐减小(数据在减小),所以每一层卷积核的卷积核会增加(把失去的数据补充回来,在C上体现)。
在卷积神经网络中也会专门的针对通道进行优化。
全连接的通道少(无),卷积的通道多
卷积原理
卷积核
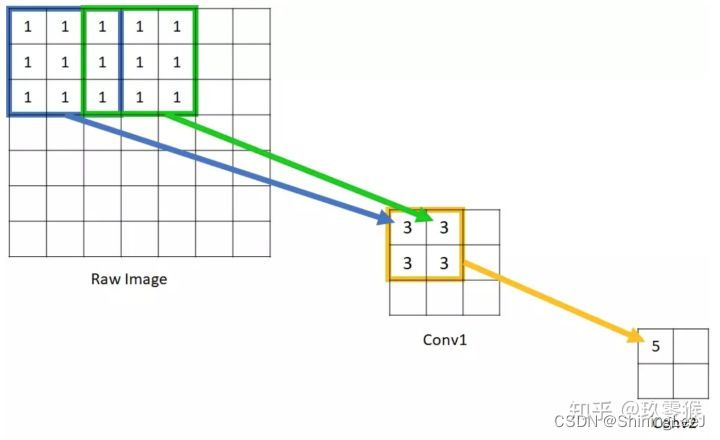
卷积核中的数字也就是卷积神经网络之中的权重。对于卷积核来说,它的尺寸大小需要等于或小于图片的尺寸。
卷积核从图像最始端,从左往右、从上往下,以指定步长的间距依次滑过图像的每一个区域。然后再求和,将结果保存到输出的对应位置。
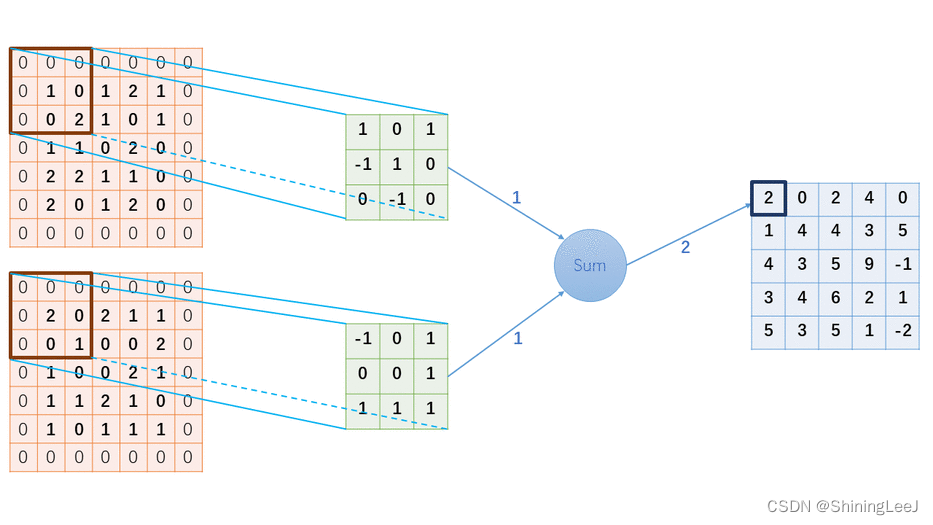
卷积运算
输入的图片是3通道,1个卷积核进行卷积运算:
1、该卷积核是三个通道
2、特征图是一个通道
3、卷积核的输入结构是NCHW
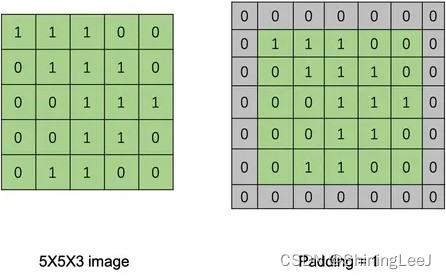
补充:padding填充
卷积神经网络结构分析
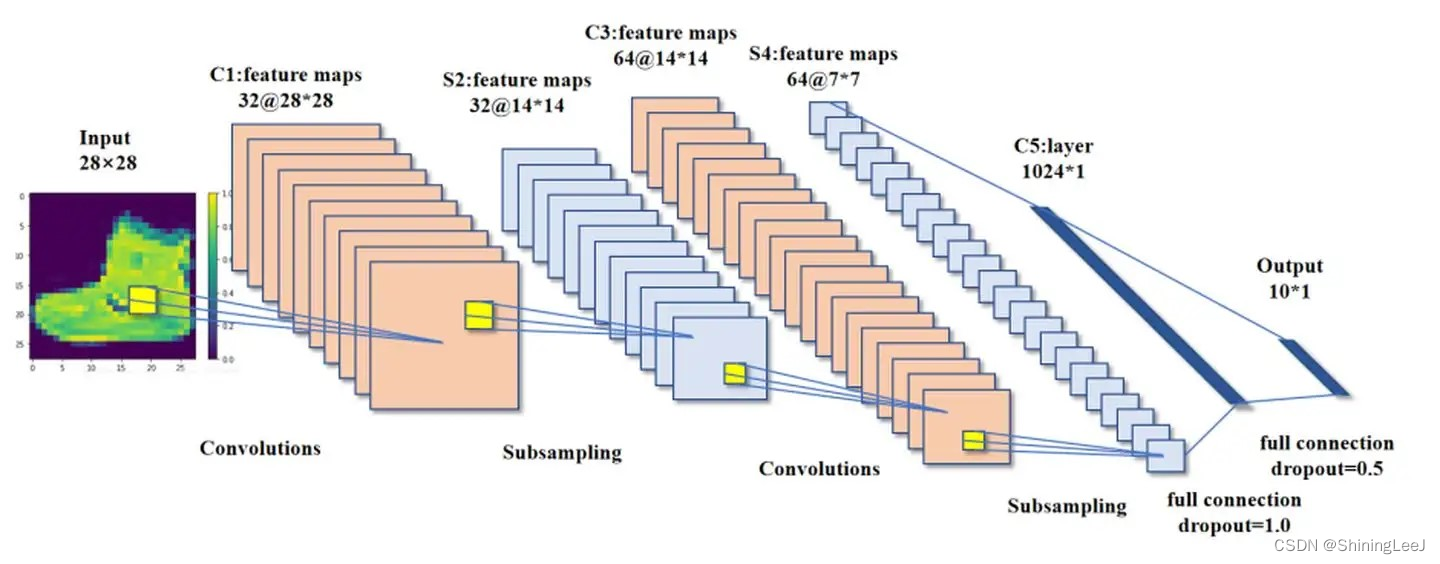
对于上图,图片的C=1,H=28,W=28,在构建卷积神经网络时的输入通道应该为1。经过10个卷积核的运算之后特征图变为C=10,H=26,W=26。
PyTorch实现卷积层:
# 输入通道、输出通道(卷积核的个数)、核的形状、步长
layer = nn.Conv2d(1, 10, 3, 1)如果图片的通道数变为3,跟上面通道数为1的图片相同。上面的卷积核输入通道为1,而下面的卷积核的输入通道应该变为3。图片经过一个卷积核进行运算时,无论卷积核有多少个通道数,最后生成的特征图也只有一个通道,经过10个卷积核运算之后图像变为C=10,H=26,W=26。
# 输入通道、输出通道(卷积核的个数)、核的形状、步长
layer = nn.Conv2d(3, 10, 3, 1)残差与batchnormal
在分析反向传播梯度下降的过程中,可能会出现梯度消失或者梯度爆炸的问题。残差是为了解决梯度消失的问题。虽然残差也能延缓梯度爆炸的问题,但是并不能解决梯度爆炸问题,而batchnormal就是专门解决这一问题的方法。
先来复习一下链式法则。 在真正的神经网络之中是远远不止的。上一层的输出会带入到下一层的输入,所以就需要运用到链式法则来进行求导。

这里的每一层都使用sigmoid函数进行激活,每一层的输出如下:
对w3的偏导数:

对w2的偏导数:

对w1的偏导数:

梯度消失
梯度消失问题就是在反向传播的时候,对参数链式求导,导数连乘过程中,有一个参数接近于0,则梯度消失了。
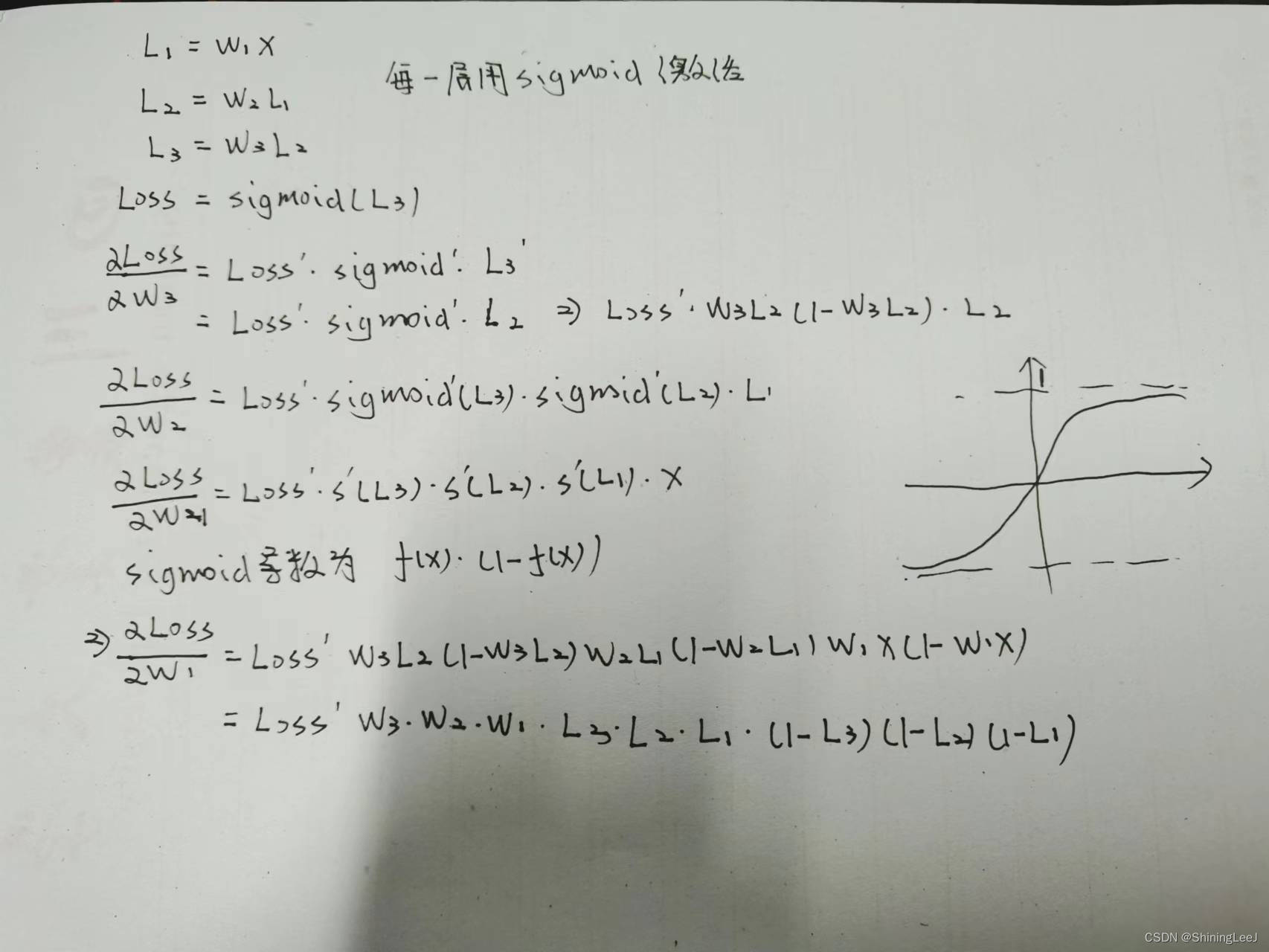
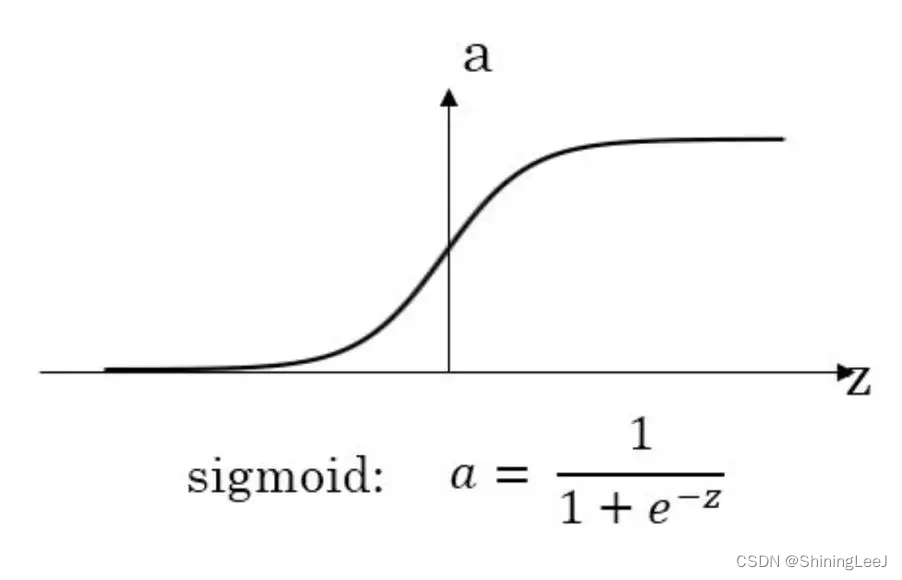
如上图进行的推导过程,对于L3和(1-L3),对照sigmoid函数:如果L3的值接近于1,那么(1-L3)会趋近于0,这两个数始终是相对应的,这就会导致梯度消失的问题。这种问题可能在神经网络的前几层并不会出现,但是随着神经网络的加深,梯度消失问题必然会发生。
梯度爆炸
梯度消失问题就是在反向传播的时候,对参数链式求导,导数连乘过程中,参数大于1,则会出现梯度爆炸问题。其推导的过程如上面的梯度消失的推导过程一样。
残差
其实就是在输出的时候加上一个输入参数,把连乘变为连加问题。

对于上图所表示的网络,最后的输出为:
而对上面的结果进行求导时,遵循下图的规则:
与之前进行的反向求导梯度下降的推导来看,残差网络将求导后连乘的结构转化为了连加的结构,以此来解决梯度消失的问题。
batchnormal
在介绍batchnormal之前,先复习一下最简单的归一化。
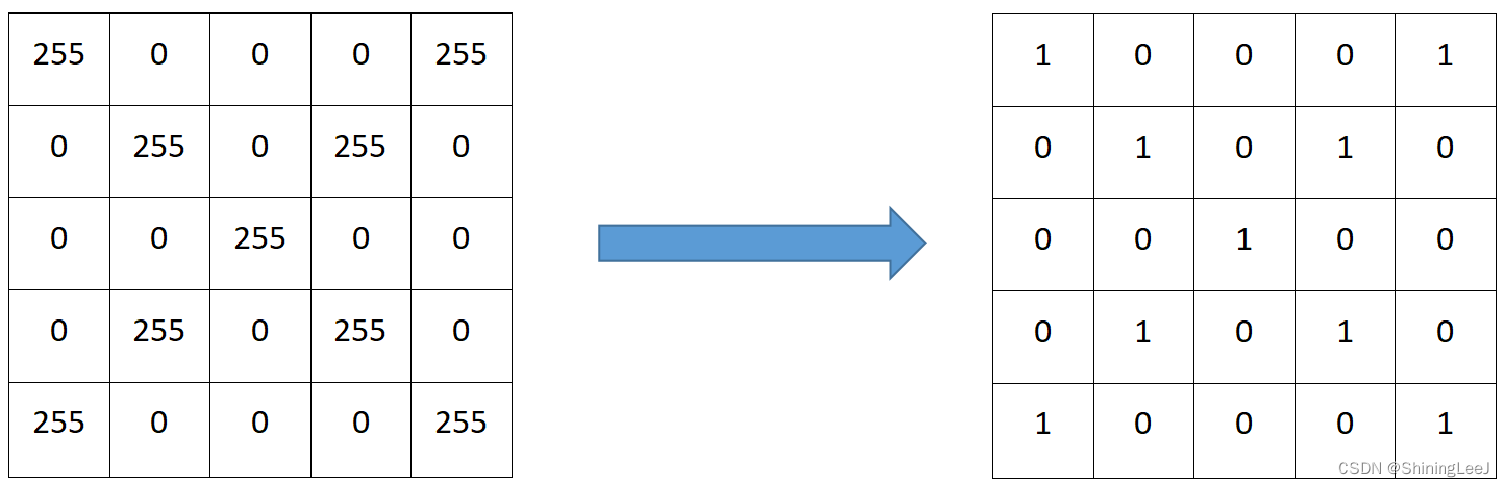
而batchnormal也是一种归一化的处理,只是不再像上图所表示的那么简单。
对输入的批数据进行归一化,映射到均值为 0 ,方差为 1 的正态分布。同时因为将输入数据都映射到了原点周围,会导致激活函数表达能力变差,所以又引入了缩放和平移,计算公式如下:

计算过程如下:
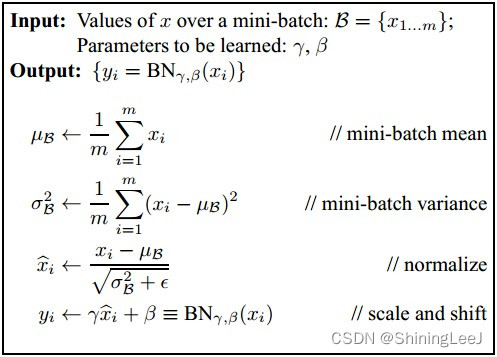
首先,计算一个批次之内的均值 μB 和方差 σ2B ,再通过batchnormal的计算公式对输出进行批归一化。
这里需要注意两点:
1.在batchnormal的前一层神经网络中需要将bias置为0。
2.batchnormal通常不i在网络的最后几层中进行使用,因为最后几层的数据量可能比较少,会导致均值和方差不准确。
class Res_Net(nn.Module):
def __init__(self,c_in,c_out,c):
super(Res_Net, self).__init__()
self.layer = nn.Sequential(
nn.Conv2d(c_in,c,3,1,padding=1,bias=True),
#nn.BatchNorm2d(c),
nn.ReLU(),
nn.Conv2d(c,c_out,3,1,padding=1,bias=True),
#nn.BatchNorm2d(c_out),
nn.ReLU()
)
def forward(self,x):
return self.layer(x) + x信息瓶颈
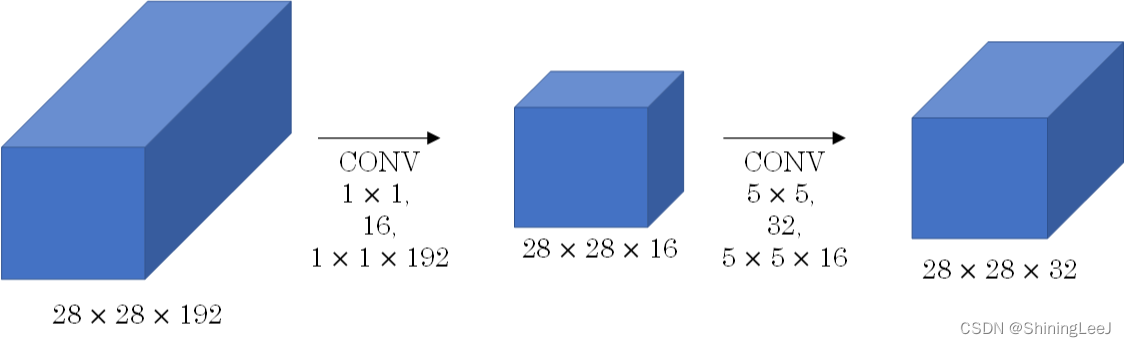
在讨论信息瓶颈前,需要了解卷积神经网络所存在的缺点。虽然卷积神经网络在很大程度上的减少了参数w和b的数量,但是在通道数量上,卷积神经网络又会导致参数增多。并且甚至会导致卷积神经网络与全连接神经网络相比,运行速度相差不多的情况。
而信息瓶颈可以解决这一问题。信息瓶颈丢弃了一些通道(在CNN进行像素融合时丢掉的,特征就只剩下一部分了,效果类似于最大池化的去噪效果。)
不要过于的担心会丢掉特征,在丢弃特征的同时,也在丢掉噪声。
通道优化
分离卷积
分离卷积从简单的来说,其实就是将卷积核拆分为更小的两个卷积核。再拆分完成之前,完成一次卷积需要计算9次。
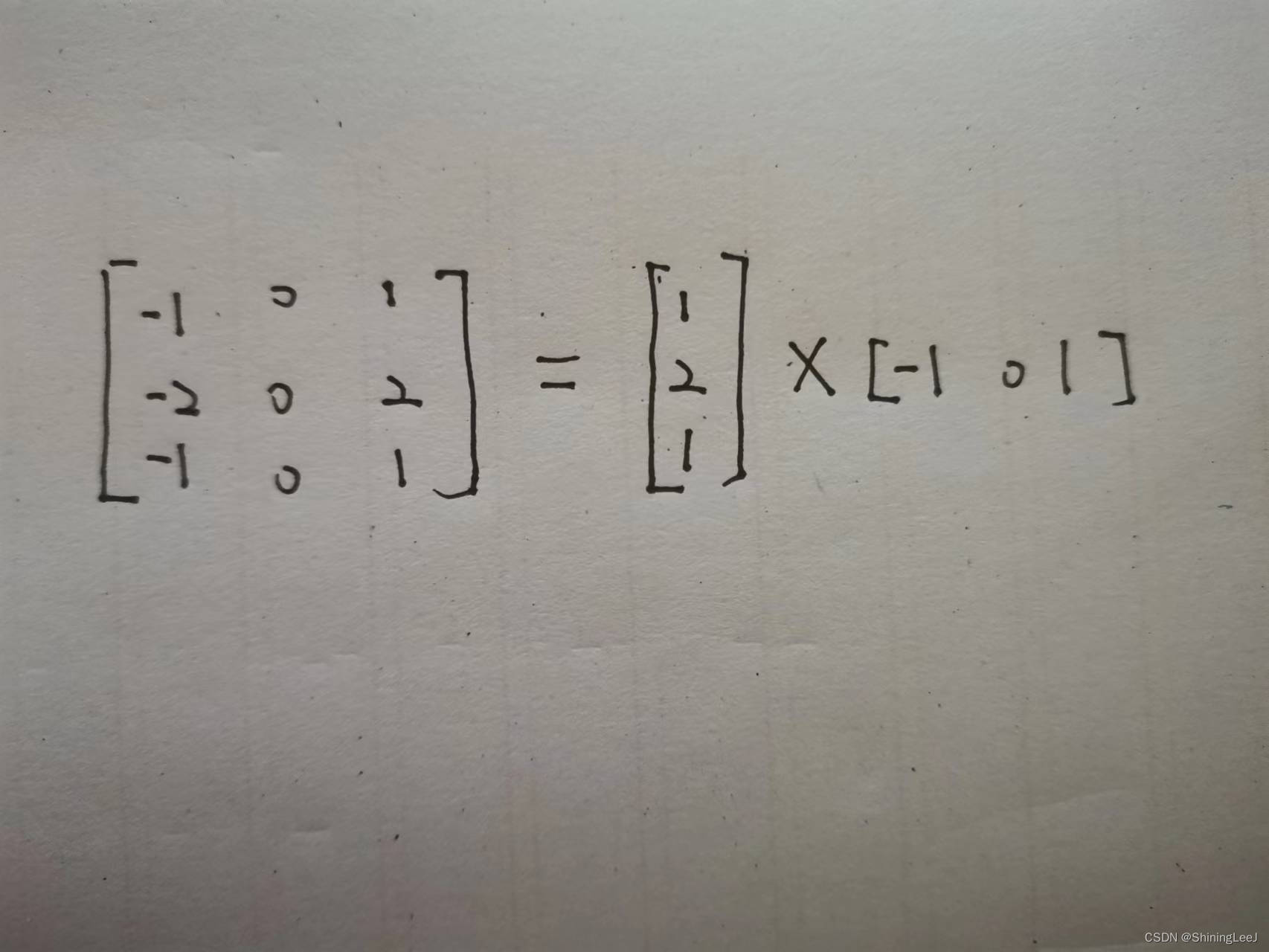
而在进行了上图所示的拆分过后,完成一次卷积只需要计算六次。这样就达到了减少运算量的过程。
但是并不是所有的卷积核都可以拆分为两个小的卷积核,所以出现了深度可分离卷积。下面来看一个普通的卷积:
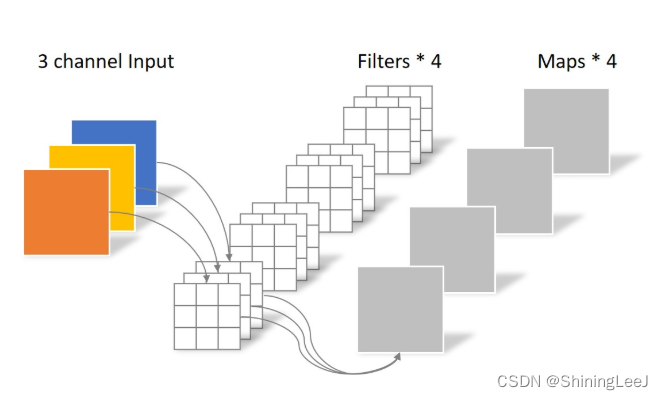
一张三通道的图片,经过四个卷积核,最后变成了四通道。假设图片的尺寸为12*12,这里可以计算出运算量为:
这里看到的运算量好像并不是很大,但是如果卷积核的个数变成512,这个运算量就会陡然增加。
对于深度可分离卷积,将分为两步去分析。首先通过三个3*3的单通道卷积核对图像进行卷积,得到三张特征图。
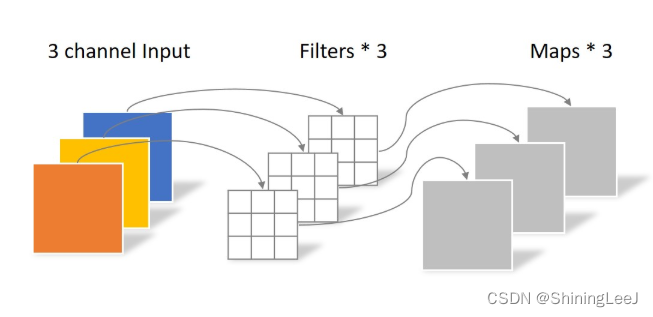
然后再使用1*1的三通道卷积核对三张特征图进行卷积,的到最后的结果。
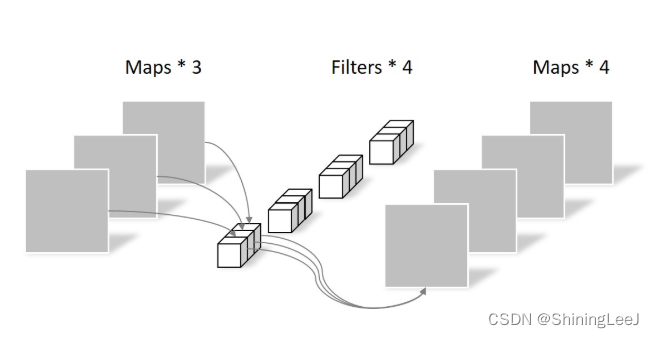
通过上面两步的卷积,运算量为:
大大的减少了运算量。
import torch.nn as nn
layer1 = nn.Conv2d(6, 6, 3, 1, groups=1)
layer2 = nn.Conv2d(6, 6, 3, 1, groups=2)
layer3 = nn.Conv2d(6, 6, 3, 1, groups=3)
layer4 = nn.Conv2d(6, 6, 3, 1, groups=6) # 深度可分离卷积通道混洗
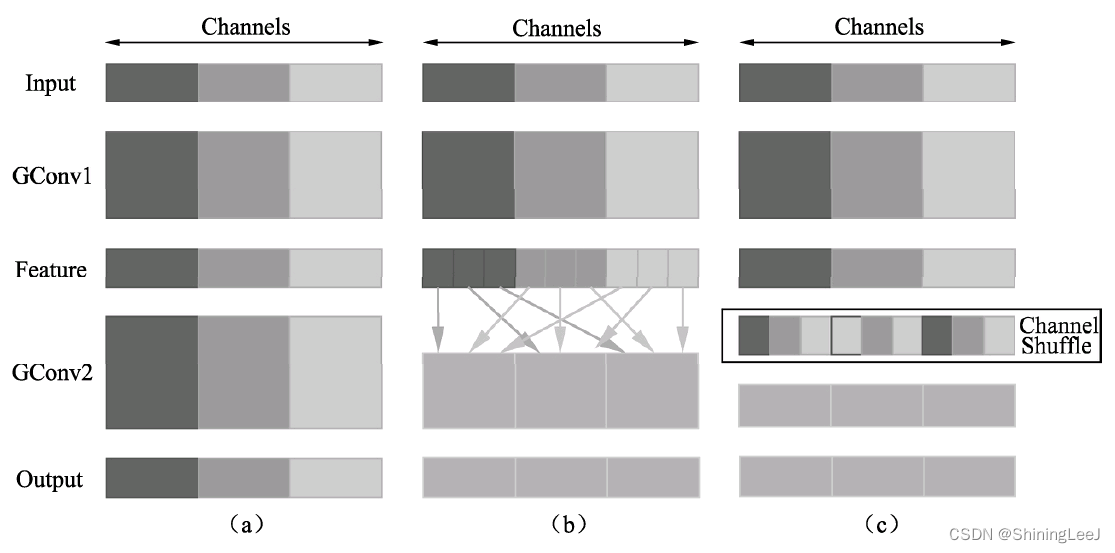
一个次卷积之后,能够像(b)一样将特征图之间的通道信息进行融合,将每一个组的特征分散到不同的组之后,再进行下一个组卷积。这样输出的特征就能够包含每一个组的特征,而如图(c)所示,通道混洗恰好可以实现这个过程。
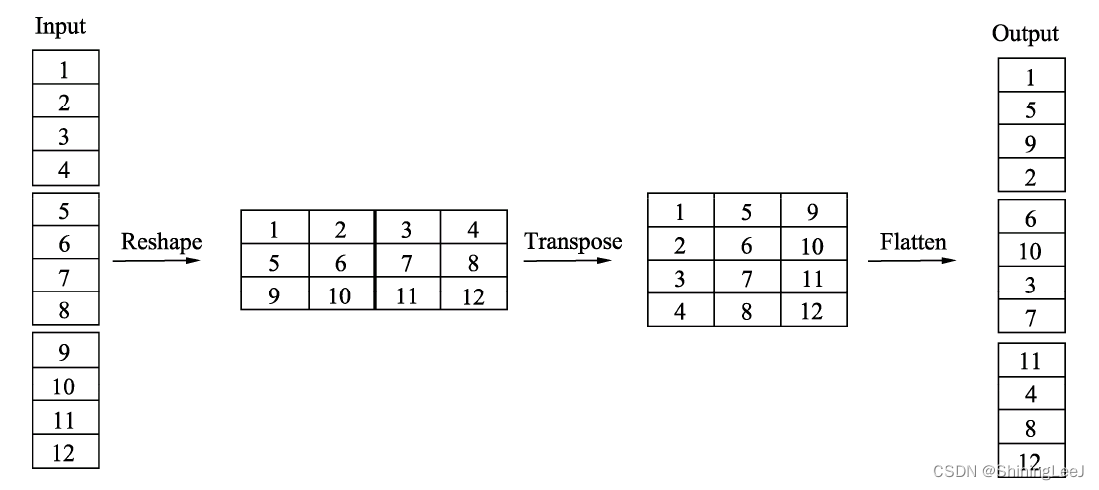
import torch
x = torch.randn(1, 6, 1, 1)
print(x)
x = x.reshape(1, 2, 3, 1, 1)
x = torch.permute(x, (0, 2, 1, 3, 4))
print(x)
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









