




简介:ShiMetaPi Hybrid Vision SDK 由 hybrid_vision_toolkit 和 hybrid_vision_algo 两个独立的SDK组成,分别实现视觉融合相机的接口控制和算法处理。
项目框图
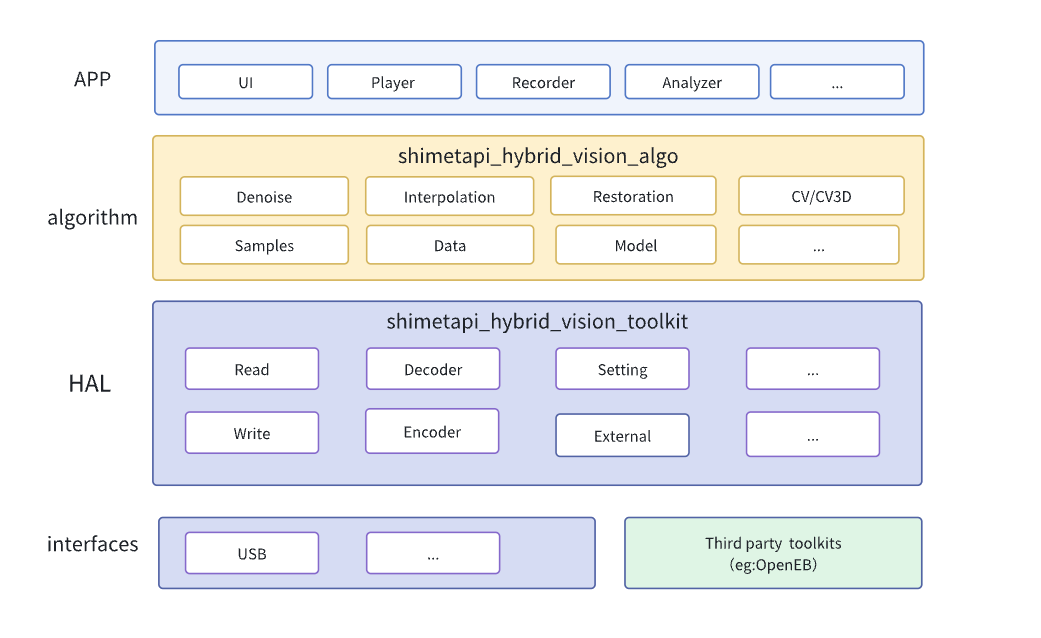
一、shimetapi_Hybrid_vision_algo (算法层 SDK)
定位: 这是 SDK 的核心算法处理层,位于架构的中间层(黄色部分)。
核心功能: 专注于处理来自事件相机的原始数据流,执行高级的计算机视觉算法,以提升数据质量、提取有用信息或进行三维理解。
包含的模块:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









