









 本文介绍如何使用Python和OpenCV实现通过界面按钮在两个摄像头间进行切换,并展示摄像头画面的技术方案。通过多线程技术确保了摄像头画面的流畅切换。
本文介绍如何使用Python和OpenCV实现通过界面按钮在两个摄像头间进行切换,并展示摄像头画面的技术方案。通过多线程技术确保了摄像头画面的流畅切换。
1.配置环境
使用环境:python3.8
平台:Windows10、Ubuntu20.04
IDE:PyCharm
2.任务要求
通过界面按钮切换显示两个摄像头的画面
如下图所示,点击前方摄像头则显示摄像头1的画面;第几后方摄像头则显示摄像头2的画面
3.技术流程
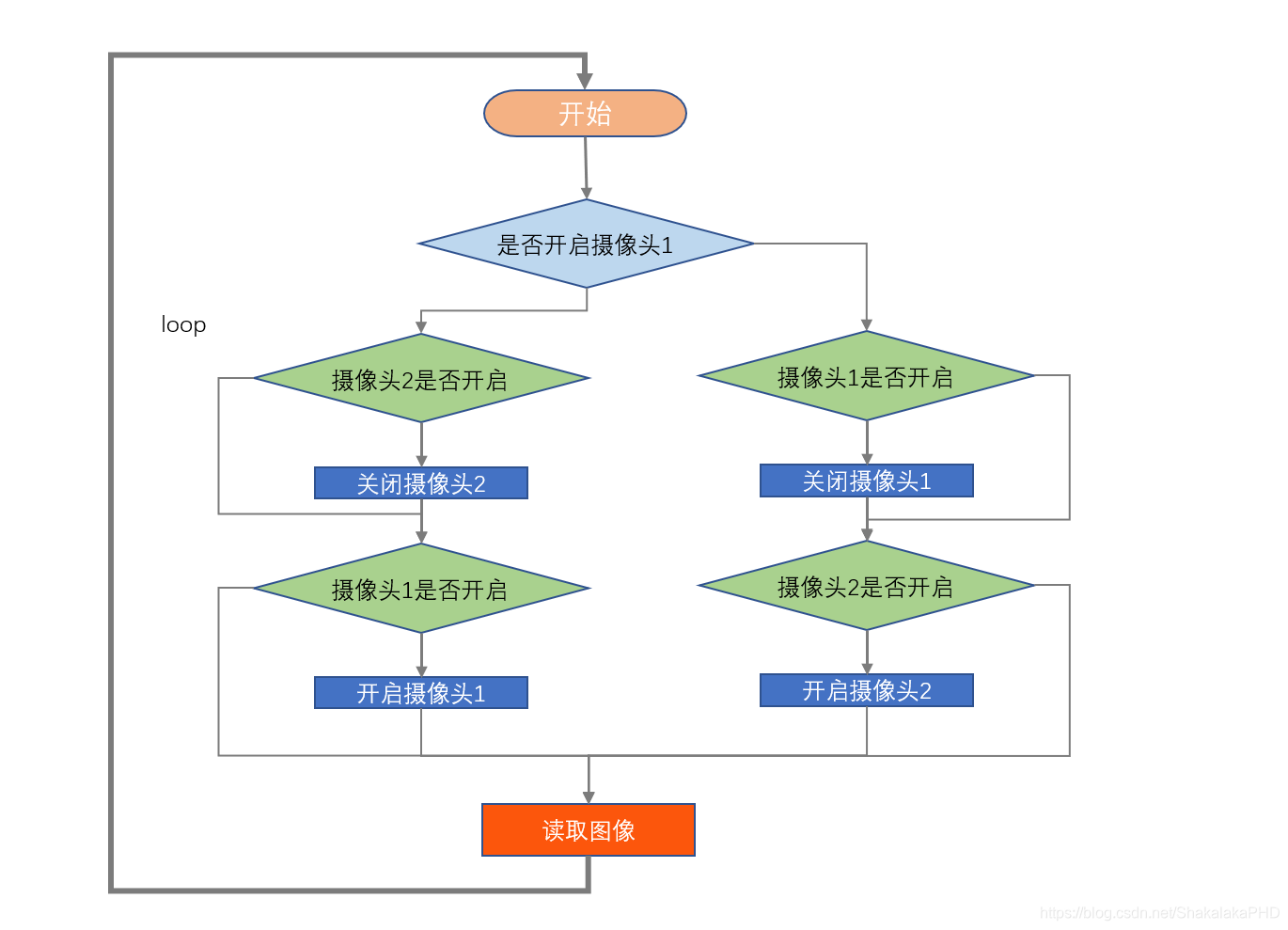
显示摄像头需要使用OpenCV,因为我们的需求是一次只显示一个摄像头,所以可以开启摄像头1后,通过按钮切换到摄像头2的过程中,先关闭摄像头1再打卡摄像头2,这样可以规避掉带宽不够而读取不出来的错误。
代码如下
from socket import *
import json
import random
from threading import Thread
from utils import utils
import time
import cv2
class Main:
def __init__(self):
self.camera_id = [0, 2]
self.cap_front = cv2.VideoCapture(self.camera_id[0])
self.cap_behind = cv2.VideoCapture(self.camera_id[1])
def get_img(self):
while True:
if self.camera_cato == "front":
if self.cap_behind.isOpened():
self.cap_behind.release()
if not self.cap_front.isOpened():
try:
self.cap_front = cv2.VideoCapture(self.camera_id[0])
except:
pass
self.success, self.frame = self.cap_front.read()
else:
if self.cap_front.isOpened():
self.cap_front.release()
if not self.cap_behind.isOpened():
try:
self.cap_behind = cv2.VideoCapture(self.camera_id[1])
except:
pass
self.success, self.frame = self.cap_behind.read()
if self.frame is not None and self.connect:
self.send_img(self.frame)
def loop(self):
while True:
print(self.send_img)
time.sleep(0.3)
def Process(self):
self.task_Proce_send_img = Thread(target=self.get_img)
# 设置为守护线程,当主线程结束后,此子线程也会随之结束
self.task_Proce_send_img.setDaemon(True)
self.task_Proce_send_img.start()
if __name__ == '__main__':
print("=====================下位机=====================\n等待接受消息...")
Main = Main()
Main.Process()
其中主要变量解释如下:
self.camera_cato为从按钮获取的值,有“front”、“behind”两种类型,分别对应摄像头1和摄像头2self.frame为读取到的图像
主要技术要点如下:
- 采用多线程,将摄像头数据的或许封装在一个函数里,通过开启子线程让其可以在后台一直运行
- 摄像头读取采用先判断另一摄像头是否开启,若开启则关闭另一摄像头,再判断此摄像头是否开启,若关闭则开启此摄像头,也就是下面这段代码
if self.cap_behind.isOpened():
self.cap_behind.release()
if not self.cap_front.isOpened():
try:
self.cap_front = cv2.VideoCapture(self.camera_id[0])
except:
pass
4.细节说明
可能有些朋友会想,为什么不直接读取两个摄像头信息赋值给两个变量,需要哪个摄像头的信息就取哪个摄像头呢?
答:这会导致两个问题:
- 提示读取两个摄像头会导致第二个摄像头读取不出来,读出来的数据是
None,究其原因是USB摄像头带宽受限,硬件的问题,这个问题可以通过设置降低摄像头分辨率来解决,但这样会损失图像质量 - 同时打开两个摄像头会占用更多的本地资源
那么可能有朋友又会想,我直接设置两个线程,一个线程负责一个摄像头,要用哪个就开哪个,不用就杀掉线程,这样是否可行呢?
答:不可行,因为打开两个线程分别读取摄像头信息后,即使杀死线程,但是系统对摄像头的占用并不会结束,另个线程仍然读不出摄像头,仍然处于带宽不足的状态。
有一点需要注意,不能直接在读取摄像头数据的进程中写入显示图像的命令,这会导致线程阻塞,目前原因还没找到,有大神知道可以在评论区告知一下,谢谢!
cv2.imshow("img", self.frame)
cv2.waitKey(1)
5.结束语
如果本文对你有帮助的话还请点赞、收藏一键带走哦,你的支持是我最大的动力!(づ。◕ᴗᴗ◕。)づ



















 4098
4098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











