







本文根据根据b站up工匠机器人阿杰的ROS教程第15集编写
基于ubuntu2004、noetic
编写的launch代码如下:
<launch>
<node pkg='ssr_pkg' type='yao_node' name='yao_node'/>
<node pkg='ssr_pkg' type='chao_node' name='chao_node' launch-prefix='gnome-terminal -e'/>
<node pkg='atr_pkg' type='ma_node' name='ma_node' output='screen' />
</launch>在终端启动launch
roslaunch atr_pkg kai_hei.launch 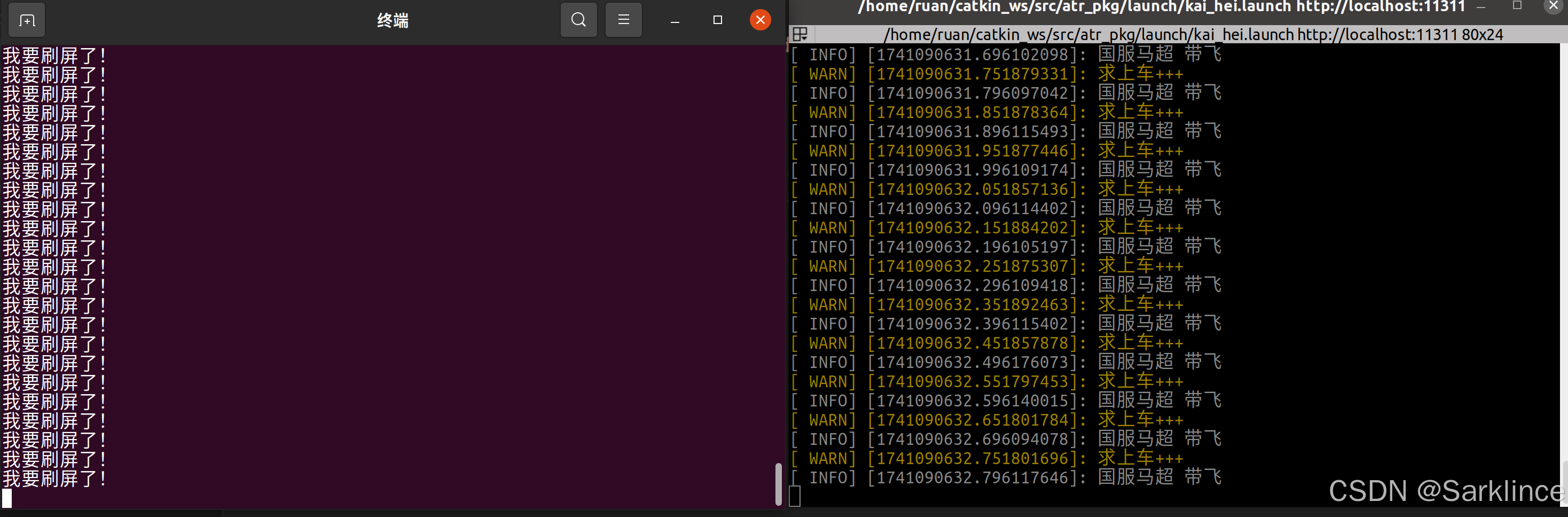
输出结果如上
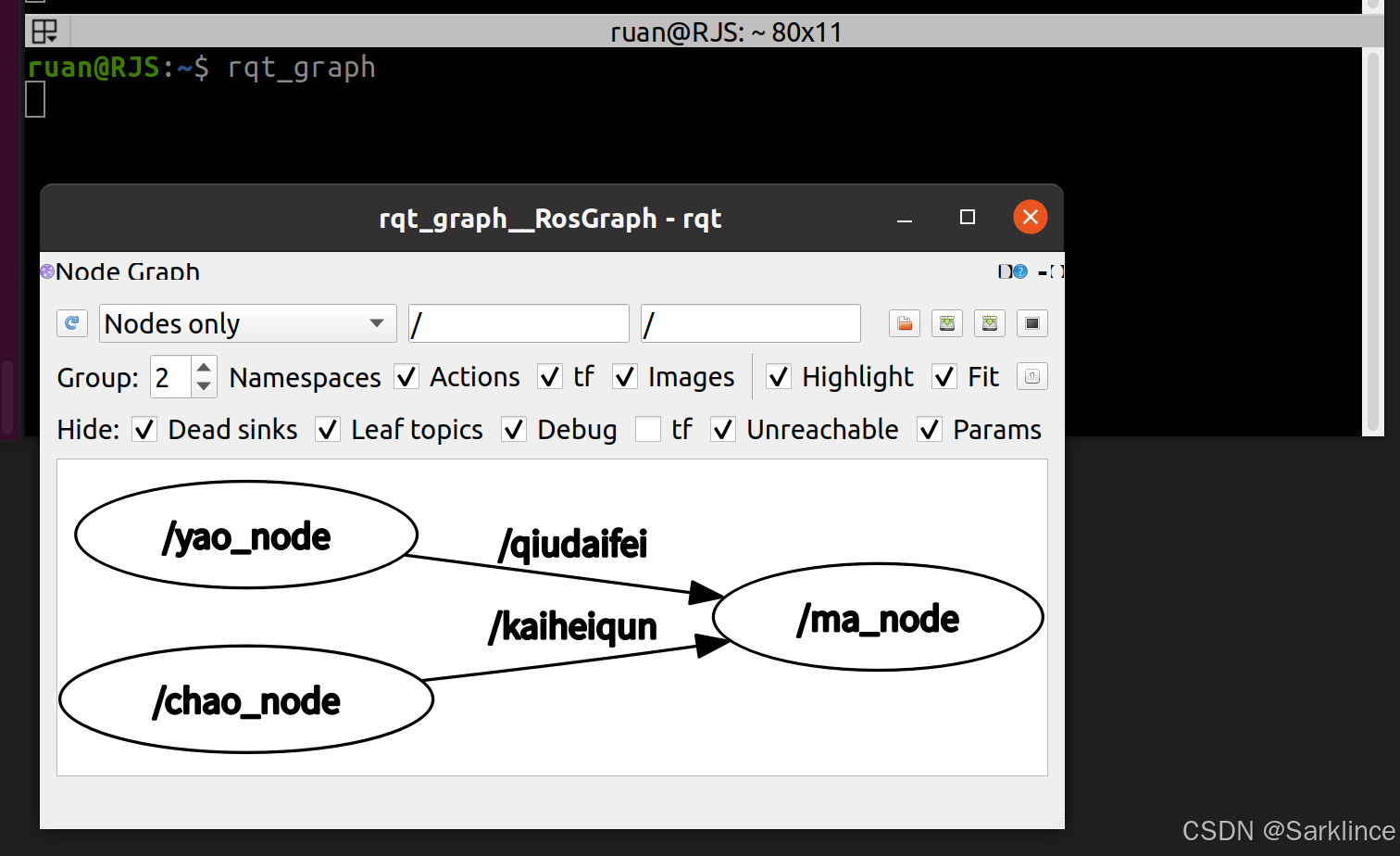
再打开一个终端,输入
rqt_graph
可以看到计算图:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









