



 本文介绍了如何在命令行模式下执行JMeter脚本,包括-n、-t、-l、-e和-o等参数的使用。当遇到无权限问题时,可以通过chmod授权解决。同时,讲解了如何通过jmeter.properties文件调整控制台取样间隔,并优化JVM堆内存设置。此外,还详细阐述了如何生成HTML测试报告,以及如何通过jtl文件分析性能测试结果。最后,提到了远程执行脚本的方法和JMeter的参数优化策略。
本文介绍了如何在命令行模式下执行JMeter脚本,包括-n、-t、-l、-e和-o等参数的使用。当遇到无权限问题时,可以通过chmod授权解决。同时,讲解了如何通过jmeter.properties文件调整控制台取样间隔,并优化JVM堆内存设置。此外,还详细阐述了如何生成HTML测试报告,以及如何通过jtl文件分析性能测试结果。最后,提到了远程执行脚本的方法和JMeter的参数优化策略。
本机命令行执行脚本
cd 脚本目录
jmeter -n -t login.jmx -l /report/result.jtl -e -o /report/result-100
jmeter -n -t 脚本名称.jmx -l report/
-n:命令行执行
-t:指定的脚本
-l:指定生成jtl格式的报告及报告所在的目录
-e:结束即生成HTML测试报告
-o:测试报告所在的目录
使用jmeter命令执行脚本提示无权限的:
进入到jmeter根目录下执行 chmod -R +x ./* 授权控制台每隔一段时间就会刷新数据,当然也可以通过jmeter.properties配置文件进行修改
summariser.interval=10(默认为30s,最低可设置为6s,这里修改为10s)
Jmeter命令行模式-结果报表
三种方式来获取Jmeter的结果报表
- 在GUI模式下跑Jmeter的脚本,用tps插件实时展示图表
- 在命令行模式下跑Jmeter的脚本,生成的jtl文件,在GUI界面的聚合报告里打开,可以展示tps和响应时间等数据
- 在命令行模式下跑Jmeter的脚本,生成的jtl文件,通过Jmeter自带命令,生成html报表
Jmeter命令行模式-html报表
使用已有jtl文件数据生成html报表步骤
- 进入jmeter的bin目录下,修改reportgenerator.properties
- 修改jmeter.reportgenerator.overall_granularity=1000(报表中数据展示间隔1秒,最低支持1秒)
- 创建一个存放数据报表的文件夹
- 执行命令:jmeter -g result.jtl -o ./report
其中:
-g 指定jtl文件的路径
-o 指定html报表生成到哪个文件夹下
将生成的html文件夹压缩发送到非Linux电脑查看
- zip -r report.zip report/ 将report文件夹压缩成report.zip
- sz report.zip 发送report.zip到当前电脑:FinalShell连接linux(前提安装有lrzsz)
- rz 从当前电脑上传文件到Linux系统
远程命令行执行脚本
cd 脚本目录
jmeter -n -t 脚本名称.jmx -R 192.168.226.131(执行机IP) -l report/Jmeter参数优化
-
控制台取样间隔设置
jmeter.properties文件
summariser.interval=10(默认为30s,最低可设置为6s,这里修改为10s) -
Jvm参数优化
bin目录下, vi jmeter,修改HEAP的size大小,默认为1024M,可以设置成2048M(前提内存足够)
HEAP="-Xms2g -Xmx2g -XX:MaxMetaspaceSize=256m" -
默认编码修改
sampleresult.default.encoding=UTF-8
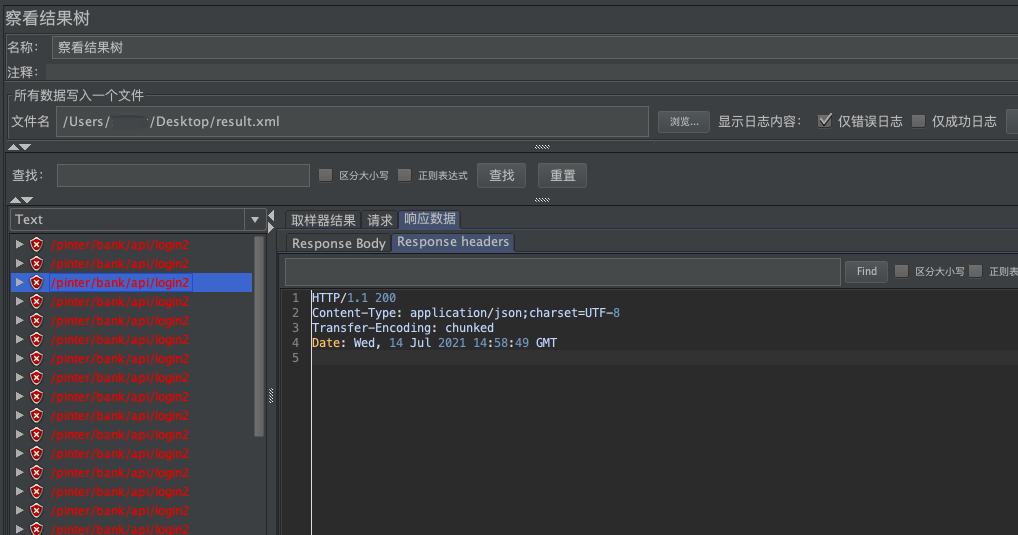
命令行执行脚本中的结果树使用
- GUI模式下结果树展示比较消耗性能
- 可以设置结果数写入的文件及写入的数据,勾选仅错误日志写入,在非GUI模式下执行脚本
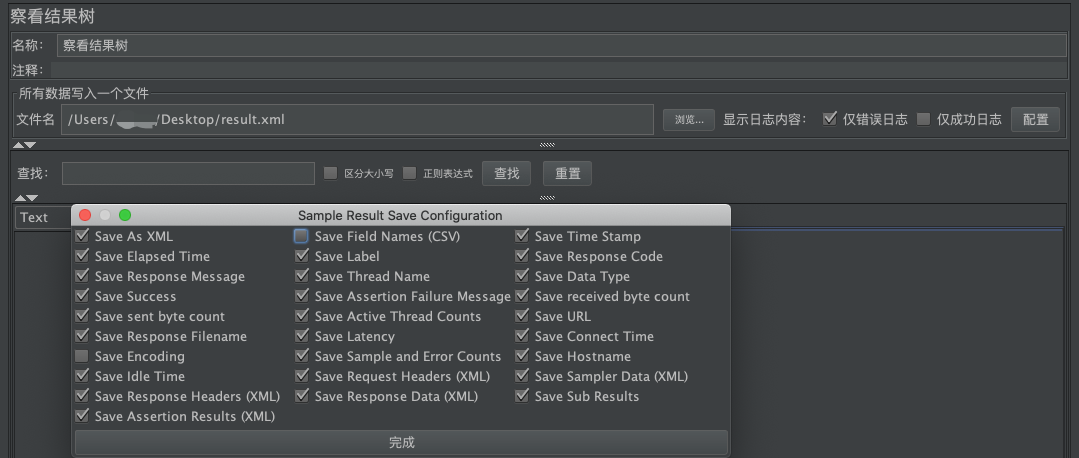
- 脚本执行后,如有错误,可在GUI模式下打开xml文件进行排查问题

















 1455
1455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









