





背景
作为开源计算流体力学( CFD)领域的标杆工具,OpenFOAM 在工程仿真中始终是处理复杂流体流动与多物理场耦合问题的核心支柱 。该软件凭借其灵活的有限体积法框架与模块化数值库,支持从不可压缩到可压缩流 、层流到高雷诺数湍流 、以及复杂外形绕流等场景的精准模拟, 尤其在地面交通( 如车辆气动优化) 、航空航天( 如飞行器外流场分析) 等领域的流体行为解析中展现出独特优势。
车辆外流场仿真虽能高效获取气动性能数据( 如阻力 、升力), 但复杂车身几何的网格适配性 、湍流模型的非线性迭代、高雷诺数流场的精细捕捉等核心环节,对数值算法的稳定性、网格生成工具的鲁棒性及硬件资源的并行效率提出了严苛要求。因此, —个适配的高性能计算平台,对 OpenFOAM 的高效求解至关重要。
为此,神工坊®技术团队基于典型复杂外形外流场场景 —— “motorbike高速绕流” 算例,在多个主流仿真平台上开展了 OpenFOAM 求解效率的对比分析。该模型以真实摩托车几何为研究对象, 涵盖复杂曲面的边界层发展、气流分离与尾涡演化,需通过 snappyHexMesh 实现贴体网格生成,并结合 k-omega SST 湍流模型捕捉近壁面流场细节,全面考验平台的网格处理能力、数值计算精度与大规模并行扩展性。
算例介绍
OpenFOAM 自带的 motorbike 算例是外流场仿真领域的经典模板,专为演示复杂三维外形绕流分析而设计, 尤其适合车辆气动性能研究场景。该算例以真实摩托车几何模型为核心, 聚焦于高速气流绕过时的流场特性, 是学习 OpenFOAM 在地面交通气动仿真中应用的理想案例。
算例分析
该算例模拟摩托车在定常来流中的绕流过程,核心目标包括:
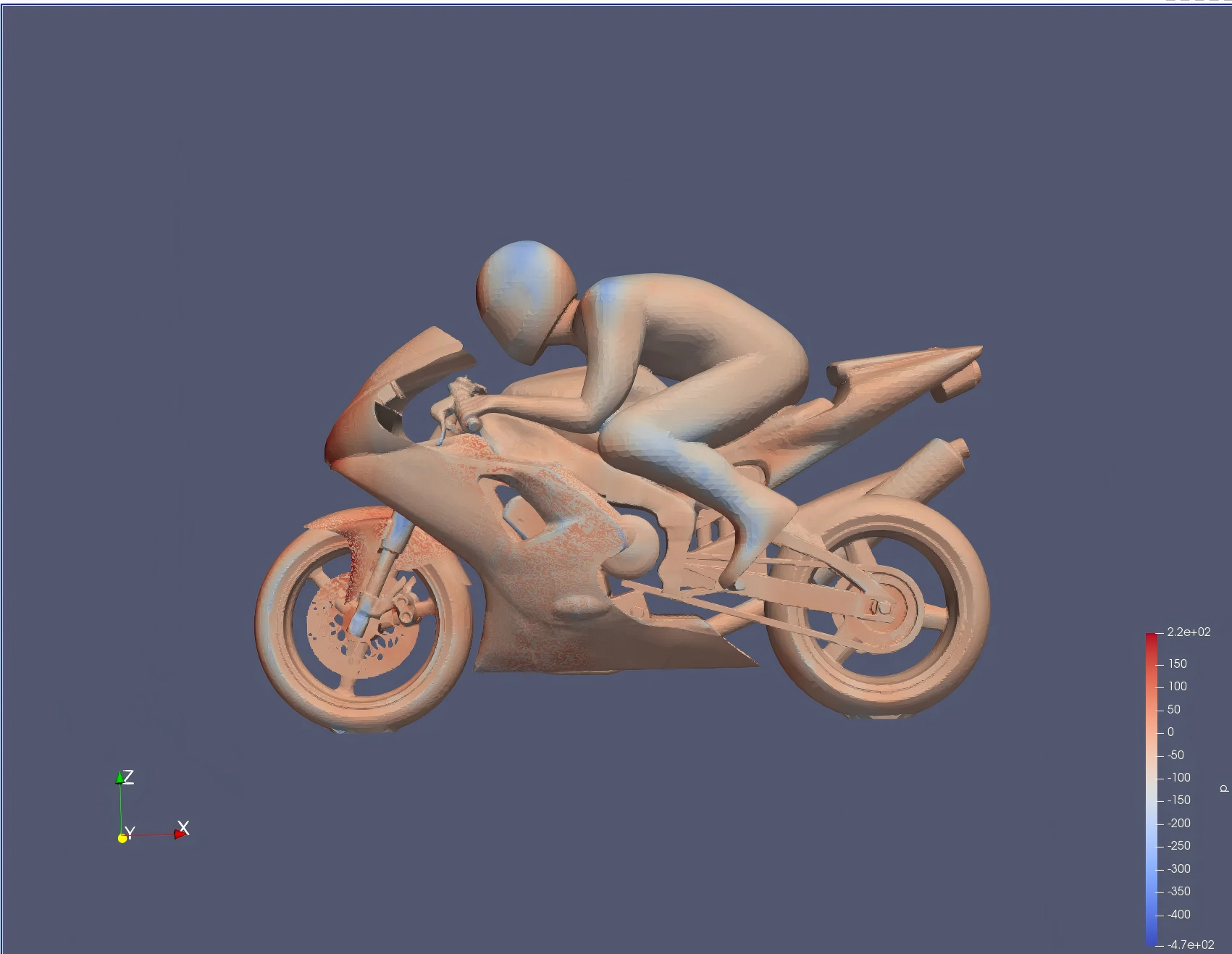
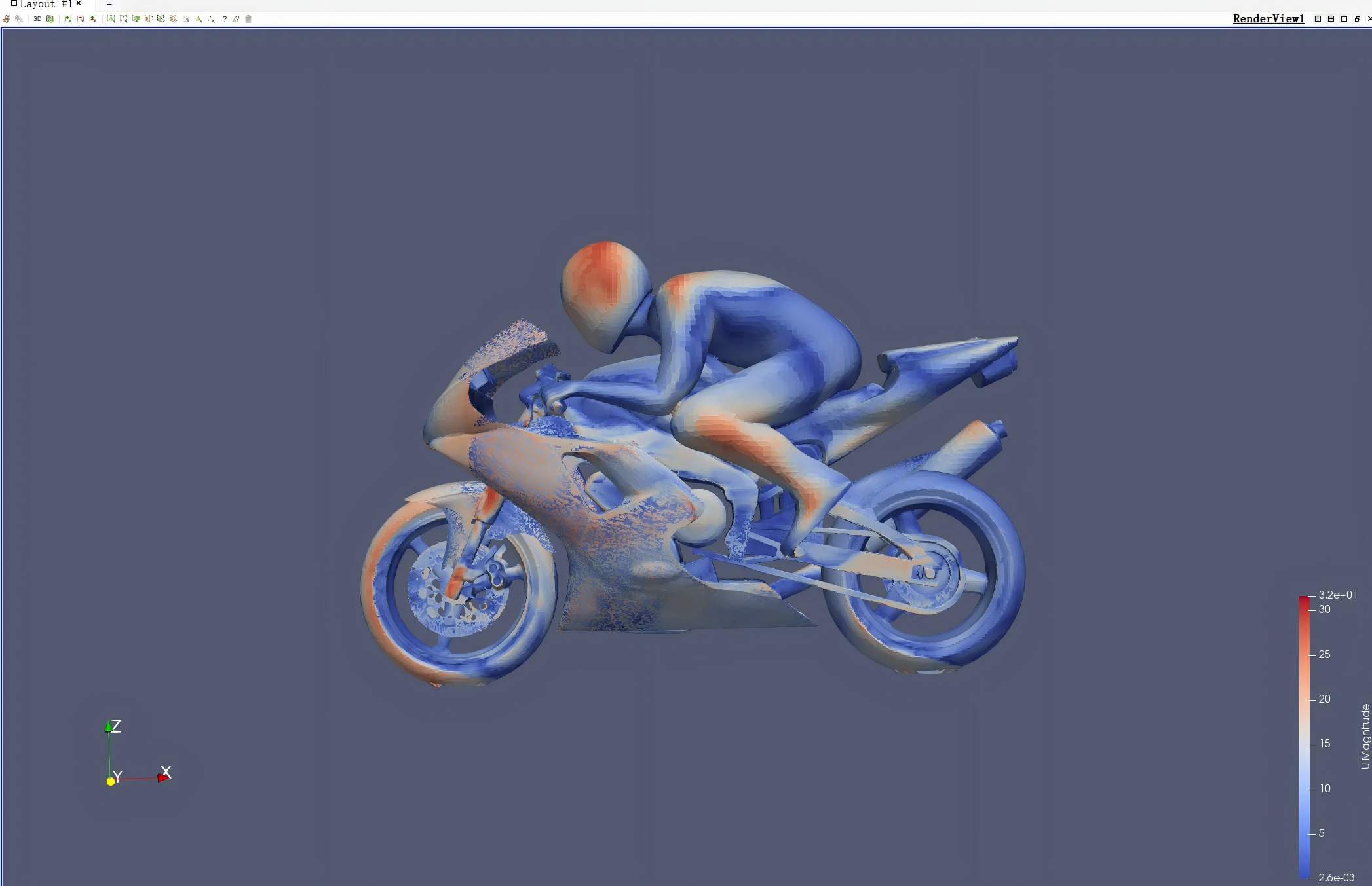
- 捕捉车身周围的流场结构, 如车头 、车身与车轮附近的边界层发展 、气流分离区域 、尾部涡系演化等细节;
- 计算关键气动参数, 如整车阻力系数(Cd)、升力分布,为车辆外形优化(如导流罩设计、车身流线型改进)提供数据支撑;
- 验证湍流模型在复杂曲面绕流中的适用性, 尤其针对高雷诺数下的湍流行为( 如车轮旋转带来的局部扰动 、车身部件间的气流干涉) 。
在SimForge™ 平台使用OpenFoam
脚本提交方式
- 登录神工坊® Simforge™ 高性能仿真平台后,打开命令终端。

- 在新建文件夹中放入算例文件及提交脚本
- 修改demo.sh对应参数后提交作业
仿真结果展示
测试环境及结果
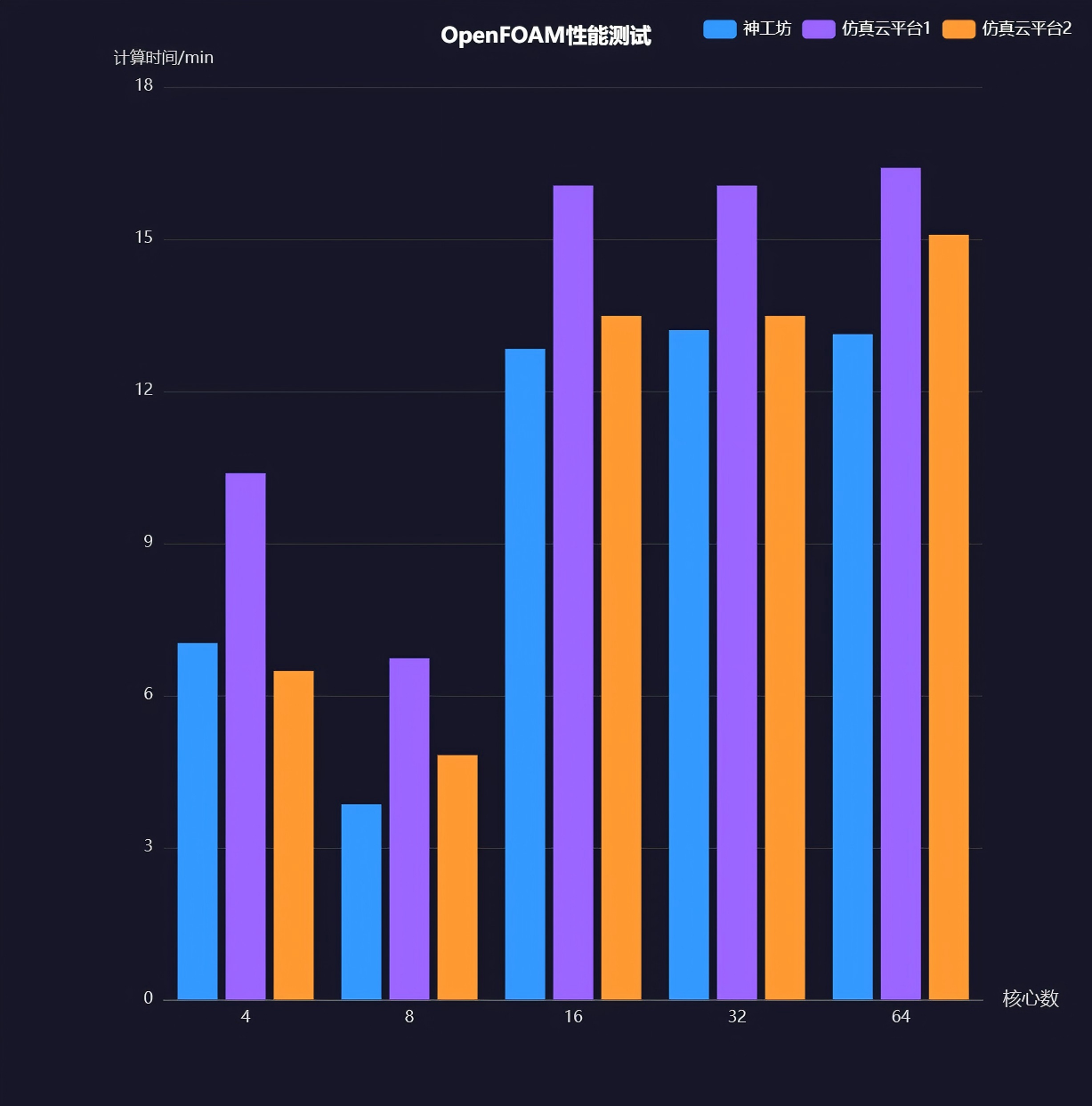
本次仿真并行规模分别选取了4核 、16核 、32核 、64核, 受限另外两个平台无法进行跨节点并行, 并行规模无法进—步扩大 。但是我们在SimForge™平台进行了更大规模的并行计算, 结果显示计算用时会进—步缩短
SimForge™高性能工业仿真平台与其他几家仿真云平台的计算时间如下图所示。
结论
本次性能测试表明,SimForge™高性能仿真云平台在使用Openfoam进行并行仿真时, 无论是计算时间还是并行效率,均有较大的相对优势。其海量软硬件资源及弹性调度系统为处理大规模显式仿真任务提供了坚实基础。
此外,SimForge™ 还集成了一体化的前后处理功能,用户可在平台内完成几何清理、网格划分、计算提交及结果可视化的全流程操作,极大提升了仿真工作效率。
神工坊®始终致力于以工程师们的需求为先,将先进算力转化为工业算能,让SimForge™高性能仿真云为您提供高效、稳定且易于使用的仿真环境,助您专注于产品创新与工程设计。点击进入官网,注册即可获得200元免费试用体验金,开启您的一站式高性能仿真之旅。


















 379
379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









