






Description
使用过Android手机的同学一定对手势解锁屏幕不陌生。Android的解锁屏幕由3x3个点组成,手指在屏幕上画一条
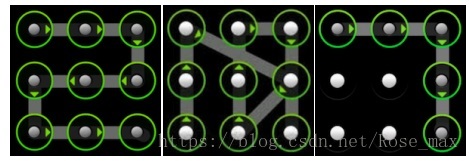
线将其中一些点连接起来,即可构成一个解锁图案。如下面三个例子所示:
画线时还需要遵循一些规则 1.连接的点数不能少于4个。也就是说只连接两个点或者三个点会提示错误。 2.两个点之间的连线不能弯曲。
3.每个点只能”使用”一次,不可重复。这里的”使用”是指手指划过一个点,该点变绿。
4.两个点之间的连线不能”跨过”另一个点,除非那个点之前已经被”使用”过了。
对于最后一条规则,参见下图的解释。左边两幅图违反了该规则:而右边两幅图(分别为2→4→1→3→6和→5→4→1→9→2)
则没有违反规则,因为在”跨过”点时,点已经被”使用”过了。现在工程师希望改进解锁屏幕,增减点的数目,并移动点的位置,不再是一个九宫格形状,但保持上述画线的规则不变。
请计算新的解锁屏幕上,一共有多少满足规则的画线方案。
Input
输入文件第一行,为一个整数n,表示点的数目。 接下来n行,每行两个空格分开的整数xi和yi,表示每个点的坐标。
-1000≤xi,Yi≤l000,1≤n<20。各点坐标不相同
Output
输出文件共一行,为题目所求方案数除以100000007的余数。
Sample Input
4
0 0
1 1
2 2
3 3
Sample Output
8
HINT
解释:设4个点编号为1到4,方案有1→2→3→4,2→1→3→4,3→2→1→4,2→3→1→4,
及其镜像4→3→2→1,3→4→2→1,2→3→4→1,3→2→4→1.
题解
好慌只会O(n22n)O(n22n)怎么办
然后我就过了。。
你就设f[i][j]表示以i为结尾,状态为j的方案数
然后再压一个go[i][j]表示i想到j必须要选定哪些点,压起来
瞎转移
卡卡常就跑的飞快了
#include<cstdio>
#include<cstring>
#include<cstdlib>
#include<algorithm>
#include<cmath>
using namespace std;
const int mod=100000007;
int bin[22];
int f[25][(1<<20)+10],go[25][25];
struct pt{double x,y;}w[25];
bool findpla(pt n1,pt n2,pt n3)//n3是否在n1->n2中
{
double Kx=(n2.y-n1.y)/(n2.x-n1.x);
double Ky=(n3.y-n1.y)/(n3.x-n1.x);
if(Kx!=Ky)return false;
if(n3.x>=min(n1.x,n2.x) && n3.x<=max(n1.x,n2.x) && n3.y>=min(n1.y,n2.y) && n3.y<=max(n1.y,n2.y))return true;
return false;
}
int n,ans;
int main()
{
bin[0]=1;for(int i=1;i<=22;i++)bin[i]=bin[i-1]*2;
scanf("%d",&n);
for(register int i=1;i<=n;i++)scanf("%lf%lf",&w[i].x,&w[i].y);
for(register int i=1;i<=n;i++)
for(register int j=1;j<=n;j++)
{
int tmp=0;
for(int k=1;k<=n;k++)
if(k!=i && k!=j && findpla(w[i],w[j],w[k]))tmp+=bin[k-1];
go[i][j]=tmp;
}
for(register int i=1;i<=n;i++)f[i][bin[i-1]]=1;
for(register int j=1;j<=bin[n]-1;j++)
for(register int i=1;i<=n;i++)if(bin[i-1]&j)
for(register int k=1;k<=n;k++)if(k!=i &&(bin[k-1]&j)==0 && (j|go[i][k])==j)f[k][j|bin[k-1]]=(f[k][j|bin[k-1]]+f[i][j])%mod;
for(register int i=0;i<=bin[n]-1;i++)
{
int tmp=0;
for(register int j=1;j<=n;j++)if(i&bin[j-1])tmp++;
if(tmp<=3)continue;
for(register int j=1;j<=n;j++)ans=(ans+f[j][i])%mod;
}
printf("%d\n",ans);
return 0;
}
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









