



 文章详细介绍了如何实现R253样机8自由度串联四足机器人的前进功能及转向步态,包括串联关节型机器人运动算法、硬件配置(如Basra主控板、Bigfish2.1扩展板和7.4V锂电池),以及基于Arduino的编程实现。此外,还提供了前进和转向的实验程序源代码和相关3D文件资源。
文章详细介绍了如何实现R253样机8自由度串联四足机器人的前进功能及转向步态,包括串联关节型机器人运动算法、硬件配置(如Basra主控板、Bigfish2.1扩展板和7.4V锂电池),以及基于Arduino的编程实现。此外,还提供了前进和转向的实验程序源代码和相关3D文件资源。
1. 功能说明
本文示例将实现R253样机8自由度串联四足机器人前进的功能,该机构是由4个 2自由度串联仿生腿 组成。
2. 串联关节型机器人运动算法
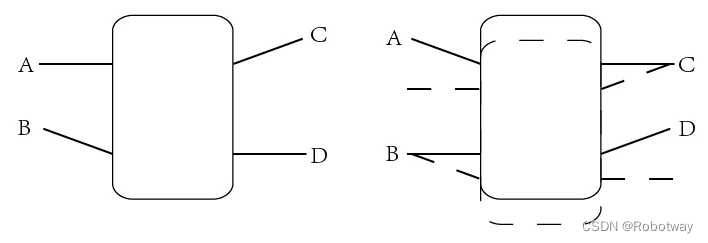
8自由度串联四足机器人的前进步态是将机器人四足分成两组腿(身体一侧的前足与另一侧的后足)分别进行摆动和支撑,即处于对角线上的两条腿的动作一样,均处于摆动相或均处于支撑相,如下图所示:
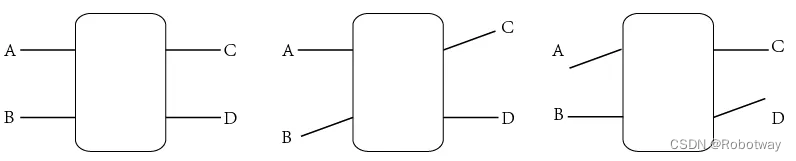
当转向时对角线上的腿部摆动方向会跟前进步态不一样,如下图所示为一个左转的步态:
3. 电子硬件
本实验中采用了以下硬件:
| 主控板 | |
| 扩展板 | |
| 电池 | 7.4V锂电池 |
电路连接说明: D3、D4;D7、D 8;D11、D12;A2、A3为舵机引脚分别对应8自由度串联四足机器人在Bigfish扩展板上的连接位置
【注意:两个舵机为一条腿,不要分开连接】
这里需要注意下,因为该机器人结构上有8个舵机,而Bigfish扩展板上的舵机接口是6个,所以我们需要对Bigfish扩展板进行改装(通过跳线的方式将Bigfish扩展板上常规使用的传感器接口转为舵机接口)。
4. 功能实现
编程环境:Arduino 1.8.19
下面提供一个8自由度串联四足机器人步态前进的参考例程(_1_17.ino),将参考例程下载到主控板中,具体实验效果可参考官网演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-04-20 https://www.robotway.com/
------------------------------*/
/*------------------------------------------------------------------------------------
实验功能:
八自由度四足机器人运动
实验接线:
【--机器人头部(俯视图)--】
----------------------------------------------------
左前腿[外侧腿----内侧腿] 右前腿[内侧腿----外侧腿]
内侧 外侧 内侧 外侧
.--. .--. .--. .--.
| |---| | | | | |
D3 | |---| | D4 D7 | | | | D8
---* ---* *--* *--*
左后腿[外侧腿----内侧腿] 右后腿[内侧腿----外侧腿]
内侧 外侧 内侧 外侧
.--. .--. .--. .--.
| |---| | | | | |
A3 | |---| | A2 D12 | | | | D11
---* ---* *--* *--*
---------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT by 机器谱 2023-04-20 https://www.robotway.com/
-------------------------------------------------------------------------------------*/
#include <Arduino.h>
#include <avr/pgmspace.h>
#include <Servo.h>
#include "Config.h"
#include "PROGMEM_DATA.h"
Servo myServo[8];
void act_length(); //动作数组长度计算
void ServoStart(); //舵机连接
void ServoStop(); //舵机断开
void ServoGo(); //舵机转动
void readProgmem(); //读取PWM值
void servo_init(); //舵机初始化
void servo_move(); //动作执行
void setup() {
Serial.begin(9600);
act_length();
}
void loop() {
servo_move(ACTION_INIT, 2);
delay(1000);
servo_move(ACTION_MOVE, 20);
while(1){};
}
void act_length()
{
actPwmNum[0] = (sizeof(actionInit) / sizeof(actionInit[0]))/SERVO_NUM;
actPwmNum[1] = (sizeof(actionMove) / sizeof(actionMove[0]))/SERVO_NUM;
actPwmNum[2] = (sizeof(actionBack) / sizeof(actionBack[0]))/SERVO_NUM;
actPwmNum[3] = (sizeof(actionLeft) / sizeof(actionLeft[0]))/SERVO_NUM;
actPwmNum[4] = (sizeof(actionRight) / sizeof(actionRight[0]))/SERVO_NUM;
/*******************+++++++++此处可以添加PWM数组++++++++++++****************/
}
void ServoStart(int which){
if(!myServo[which].attached())myServo[which].attach(servo_port[which]);
pinMode(servo_port[which], OUTPUT);
}
void ServoStop(int which){
myServo[which].detach();
digitalWrite(servo_port[which],LOW);
}
void ServoGo(int which , float where){
ServoStart(which);
myServo[which].writeMicroseconds(where);
}
void readProgmem(int p, int act){
switch(act)
{
case 0: value_cur[p] = pgm_read_word_near(actionInit + p + (SERVO_NUM * count_input)); break;
case 1: value_cur[p] = pgm_read_word_near(actionMove + p + (SERVO_NUM * count_input)); break;
case 2: value_cur[p] = pgm_read_word_near(actionBack + p + (SERVO_NUM * count_input)); break;
case 3: value_cur[p] = pgm_read_word_near(actionLeft + p + (SERVO_NUM * count_input)); break;
case 4: value_cur[p] = pgm_read_word_near(actionRight + p + (SERVO_NUM * count_input)); break;
default: break;
}
}
void servo_init(int act, int num){
if(!_b)
{
for(int i=0;i<SERVO_NUM;i++)
{
readProgmem(i, act);
ServoGo(i, value_cur[i]);
value_pre[i] = value_cur[i];
}
}
num == 1 ? _b = true : _b = false;
}
void servo_move(int act, int num){
float value_delta[SERVO_NUM] = {};
float in_value[SERVO_NUM] = {};
servo_init(act, num);
for(int i=0;i< num * actPwmNum[act];i++)
{
count_input++;
if(count_input == actPwmNum[act])
{
count_input = 0;
continue;
}
for(int i=0;i<SERVO_NUM;i++)
{
readProgmem(i, act);
in_value[i] = value_pre[i];
value_delta[i] = (value_cur[i] - value_pre[i]) / frequency;
/**************************************************串口查看输出**************************************************/
// Serial.print(value_pre[i]);
// Serial.print(" ");
// Serial.print(value_cur[i]);
// Serial.print(" ");
// Serial.print(value_delta[i]);
// Serial.println();
/**************************************************串口查看输出**************************************************/
}
// Serial.println();
for(int i=0;i<frequency;i++)
{
for(int k=0;k<SERVO_NUM;k++)
{
in_value[k] += value_delta[k];
value_pre[k] = in_value[k];
/**************************************************串口查看输出**************************************************/
// Serial.print(in_value[k]);
// Serial.print(" ");
/**************************************************串口查看输出**************************************************/
}
// Serial.println();
for(int j=0;j<SERVO_NUM;j++)
{
ServoGo(j, in_value[j]);
}
delayMicroseconds(SERVO_SPEED);
}
/**************************************************串口查看输出**************************************************/
// for(int i=0;i<SERVO_NUM;i++)
// {
// Serial.println(value_pre[i]);
// }
/**************************************************串口查看输出**************************************************/
}
}大家可根据转向的步态,参考上述例程,尝试自己编写下8自由度串联四足机器人转弯的实验程序。
5. 资料内容
①前进-例程源代码
②前进-样机3D文件
资料内容详见:8自由度串联四足-前进

















 1484
1484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









