






 该文详细介绍了2自由度串联仿生腿的设计,通过两个舵机实现腿部前后摆动和上下抬伸。使用Arduino主控板和BigFish扩展板进行硬件控制,舵机连接到特定引脚,并提供了示例代码以演示腿部运动。此外,还提供了3D文件和源代码供下载。
该文详细介绍了2自由度串联仿生腿的设计,通过两个舵机实现腿部前后摆动和上下抬伸。使用Arduino主控板和BigFish扩展板进行硬件控制,舵机连接到特定引脚,并提供了示例代码以演示腿部运动。此外,还提供了3D文件和源代码供下载。
1. 运动功能说明
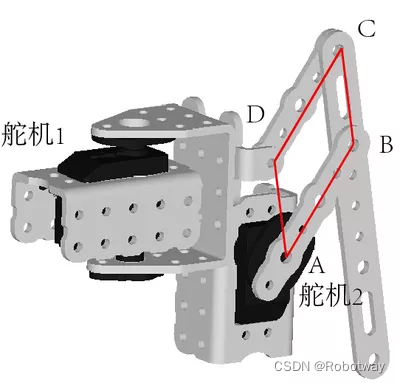
2自由度串联仿生腿的主要运动方式为:舵机1实现腿部前后摆动,舵机2实现腿部的上下抬伸。其中抬伸通过一个平行四连杆ABCD作为传动结构以增加腿部的行程和增强腿部运动的稳定性。
2. 结构说明
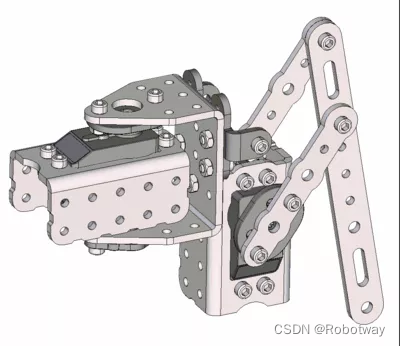
构成本模组的零部件主要是舵机(行程0度~180度)、舵机支架、舵机输出头、舵机双折弯、连杆、螺丝、螺母等。
3. 运动功能实现
3.1 电子硬件
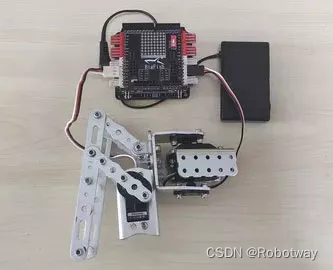
本实验中采用如下硬件:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 电池 | 7.4V锂电池 |
舵机1连接到BigFish扩展板的D8引脚;舵机2连接到BigFish扩展板的D7引脚。
3.2 编写程序
编程环境:Arduino 1.8.19
驱动本模组实际就是驱动舵机,但是需要注意舵机的摆动行程,防止堵转。
实现功能:舵机1实现腿部前后摆动;舵机2实现腿部的上下抬伸。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-03-03 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
Servo servo_pin_7;
Servo servo_pin_8;
void setup()
{
servo_pin_7.attach(7);
servo_pin_8.attach(8);
}
void loop()
{
servo_pin_7.write( 160 );
delay( 1000 );
servo_pin_8.write( 120 );
delay( 1000 );
servo_pin_7.write( 0 );
delay( 1000 );
servo_pin_8.write( 0 );
delay( 1000 );
}4. 资料下载
2自由度串联仿生腿
①模组3D文件
②例程源代码
资料内容详见:2自由度串联仿生腿


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









