



 本博客介绍用手机APP遥控轮式机械臂小车样机实现移动和搬运的实验。阐述了模拟机器人搬运过程的任务,列举了所用电子硬件,如Basra主控板等,还说明了编程环境为Arduino 1.8.19,通过判断串口字符值实现远程控制,并给出例程代码及资料下载链接。
本博客介绍用手机APP遥控轮式机械臂小车样机实现移动和搬运的实验。阐述了模拟机器人搬运过程的任务,列举了所用电子硬件,如Basra主控板等,还说明了编程环境为Arduino 1.8.19,通过判断串口字符值实现远程控制,并给出例程代码及资料下载链接。
1. 功能描述
本实验所实现的功能为:用手机APP遥控轮式机械臂小车样机实现移动和搬运。
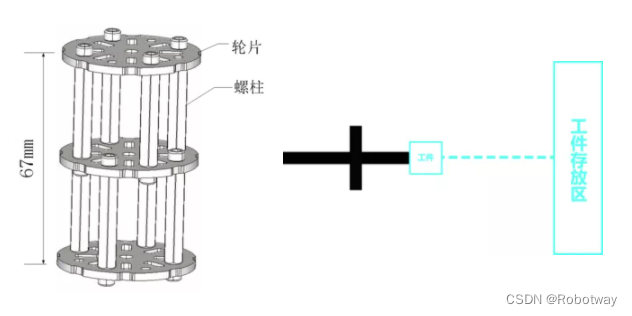
通过手机APP遥控轮式机械臂小车样机完成将工作区外的工件搬运至工作区的任务,来模拟机器人的搬运过程。首先手机遥控机器人找到未存放在工作区内的工件,然后利用机械爪将工件夹起并保持工件处于夹持状态,最后将工件搬运至工作区即算完成任务。
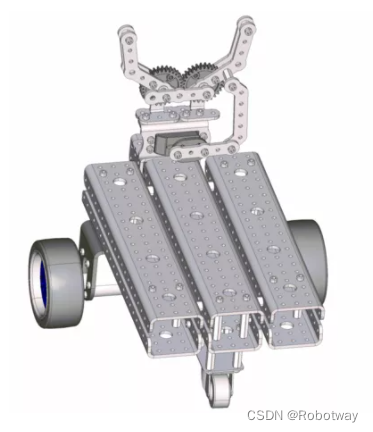
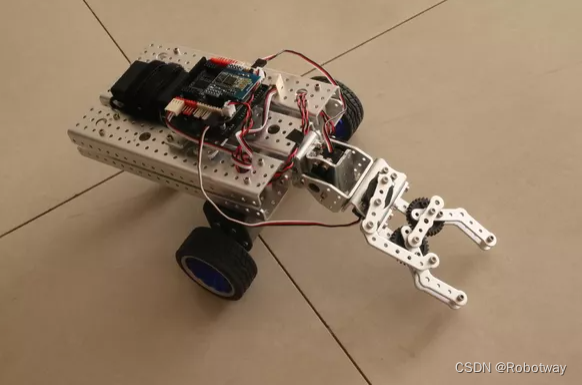
2. 所用样机
3. 电子硬件
在这个实验中,采用了以下硬件,请大家参考:
Basra主控板(兼容Arduino Uno)、Bigfish2.1扩展板、7.4V锂电池、蓝牙串口模块
为样机安装好电子模块,将关节模块的舵机线连接到D12端口,机械爪的舵机线连接到D11端口。SH-01扩展板的直流电机接口组合是5/9,6/10,分别接左侧车轮电机和右侧车轮电机。
4. 示例程序
编程环境:Arduino 1.8.19
程序通过使用if语句来判断读取到的串口的不同字符值来匹配不同的动作,从而实现对机器人的远程控制。
接收到“1”的时候,执行前进;
接收到“3”的时候,执行左转;
接收到“4”的时候,执行右转;
接收到“5”的时候,执行停止;
接收到“6”的时候,机械爪闭合;
接收到“7”的时候,机械爪张开;
接收到“8”的时候,机械臂抬起;
接收到“9”的时候,机械臂放下;
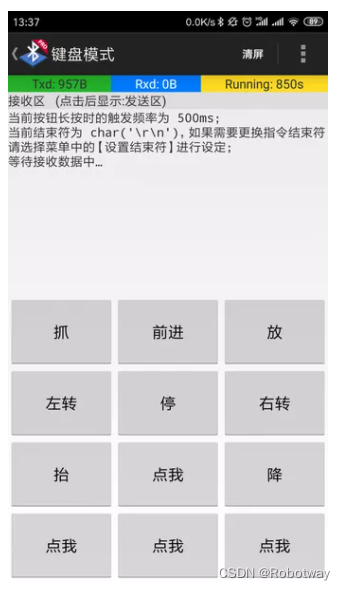
手机APP的键值按上述规则进行配置,配置方法请参考蓝牙串口模块。
例程代码(R214e_Bluetooth_RC.ino)如下:
| /*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-10-26 https://www.robotway.com/ ------------------------------ 实现功能: 从串口(蓝牙)接收字符,根据不同字符分别做出前进、原地左转、原地右转、夹爪打开、夹爪闭合、关节抬起、关节放下的动作。 ----------------------------------------------------- 实验接线: 关节:D12 机械爪:D11 左轮:D5,D9 右轮:D10,D6。 ------------------------------------------------------------------------------------*/ #include <Servo.h> int _ABVAR_1_data = 0 ; Servo servo_pin_11; Servo servo_pin_12; void tai(); void zhua(); void stop(); void fang(); void jiang(); void turnright(); void turnleft(); void go(); void setup() { pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); Serial.begin(9600); servo_pin_11.attach(11); servo_pin_12.attach(12); } void loop() { _ABVAR_1_data = Serial.parseInt() ; if (( ( _ABVAR_1_data ) == ( 1 ) )) { go(); } if (( ( _ABVAR_1_data ) == ( 3 ) )) { turnright(); } if (( ( _ABVAR_1_data ) == ( 4 ) )) { turnleft(); } if (( ( _ABVAR_1_data ) == ( 5 ) )) { stop(); } if (( ( _ABVAR_1_data ) == ( 6 ) )) { zhua(); } if (( ( _ABVAR_1_data ) == ( 7 ) )) { fang(); } if (( ( _ABVAR_1_data ) == ( 8 ) )) { tai(); } if (( ( _ABVAR_1_data ) == ( 9 ) )) { jiang(); } } void zhua() { servo_pin_11.write( 63 ); } void fang() { servo_pin_11.write( 80 ); } void go() { analogWrite(5 , 80); analogWrite(9 , 0); analogWrite(6 , 80); analogWrite(10 , 0); } void jiang() { servo_pin_12.write( 75 ); } void turnleft() { analogWrite(5 , 0); analogWrite(9 , 0); analogWrite(6 , 80); analogWrite(10 , 0); } void turnright() { analogWrite(5 , 80); analogWrite(9 , 0); analogWrite(6 , 0); analogWrite(10 , 0); } void tai() { servo_pin_12.write( 30 ); } void stop() { analogWrite(5 , 255); analogWrite(9 , 255); analogWrite(6 , 255); analogWrite(10 , 255); } |
资料内容:蓝牙遥控例程源代码、蓝牙串口助手(新版) 【资料下载链接轮式机械臂小车-蓝牙遥控搬运】

















 1538
1538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









