



特斯拉22个自由度(DOF)的灵巧手,正式上线!!

11月28日,【特斯拉Optimus】在X平台官方账号发布旗下人形机器人Optimus接球演示视频,展示其新一代手臂和灵巧手,具备22自由度的新一代灵巧手正式上线。
Optimus团队负责人Milan Kovac进一步表示: 1)接球演示是远程遥控; 2)手部拥有22个自由度,手腕/前臂拥有3个自由度(致动器像人类一样移动到前臂,通过肌腱(电缆连接方式)驱动手指,跟人类的手一样);3)所有驱动装置已移至前臂,增加了其重量;4)年底前将完成:触觉感应整合、更精细的控制、减轻前臂重量。
值的注意的是,Milan Kovac提到:特斯拉很快就会制造出配备新灵巧手的机器人。这是量产版Optimus Gen3要来了?
目前人形机器人抓取方式分为灵巧手和夹爪;特斯拉是五指灵巧手忠实拥护者,旗下人形机器人Optimus手部为重点升级模块,每次迭代都会涉及手部,提高其灵巧性、抓取能力和稳健性;
特斯拉新一代22自由度灵巧手首次被提及是2024年5月5日,特斯拉在X账号上分享Optimus(擎天柱)人形机器人的最新进展,在评论区,马斯克预告了 Optimus 人形机器人手部的最新目标,在今年晚些时候将拥有 22 自由度(DoF)。
9月10日,2024 All-In 峰会上,马斯克首次透露新一代灵巧手设计细节:第二代的 Optimus只在手部装有驱动器,等于还是靠手本身来控制手,而不像人体结构般具有整体性;下一代的 Optimus手臂设计,现在已经有原形了,驱动灵巧手的致动器像人类一样移动到前臂,它使用手指的方式是通过电缆连接,就跟人类的手一样。10月份,特斯拉以“We,Robot”为主题发布会上,新一代具备22个自由度(DOF)的灵巧手首次亮相。
灵巧手作为人形机器人末端执行与感知的工具,其性能的优劣在很大程度上决定了整个机器人的工作性能。
目前大多的多指灵巧手外观多为仿生设计(五指灵巧手),也有人形机器人企业根据场景不同采用二指夹爪、三指手等其他样式(如星尘智能旗下轮式机器人S1采用二指夹爪、银河通用旗下轮式机器人G1采用右夹爪和左吸盘组合、 UniX AI旗下轮式机器人Wanda 采用三指夹爪);目前不少人形机器人本体厂商选择自研灵巧手(如:特斯拉、智元机器人、Figure AI、星动纪元等),并涌现出一些以灵巧手作为卖点的人形机器人本体厂家(如:戴盟机器人、帕西尼感知等);除了传统灵巧手企业外,目前也涌现出一批灵巧手初创企业。
值的注意的是,10月,美国科技巨头【Meta】旗下基础人工智能研究 (FAIR)公布公司触摸感应领域的三大进展:通用触摸编码器;具有多模态感应功能的人造指尖,用于触觉交互;集成触觉感应的机械手平台;它们协同工作,使机器人能够感知事物。

详细细节:
-
触摸感应技术Sparsh:为AI提供了一种无需庞大数据库即可识别压力、纹理和运动等内容的方法;
-
机器人指尖Digit 360 :将有关机器人正在触摸的内容的信息发送到AI模型,Digit 360 中的传感器非常敏感,因此AI不仅可以确定机器人所接触物体的细节,还可以施加适合涉及物体的任务的压力,例如提升或旋转物体;
-
Plexus 的系统:协同多个触摸传感器,Plexus可以模仿人类的触觉,足以处理易碎或笨拙的物体;
国内人形机器人初创企业【戴盟机器人】是国内创始人王煜教授曾表示:“灵巧手”才是人形机器人的核心价值。
目前国内灵巧手初创公司拥有自由度最高的是灵心巧手,旗下Linker Hand系列灵巧手,其中一款拥有42个自由度,每根手指最高可独立有9个自由度;其系列产品实现了360度自由旋转,全球首创。
灵巧手价格高昂,据摩根士丹利人形机器人蓝皮书中梳理,灵巧手成本占特斯拉Optimus Gen2硬件总成本17%。
全球头部人形机器人本体企业倾向自研灵巧手并作为着重升级点,如Figure AI旗下人形机器人Figure 02手部拥有16个自由度,智元机器人新发灵巧手SkillHand拥有19个自由度。
灵巧手企业及产品参数整理:
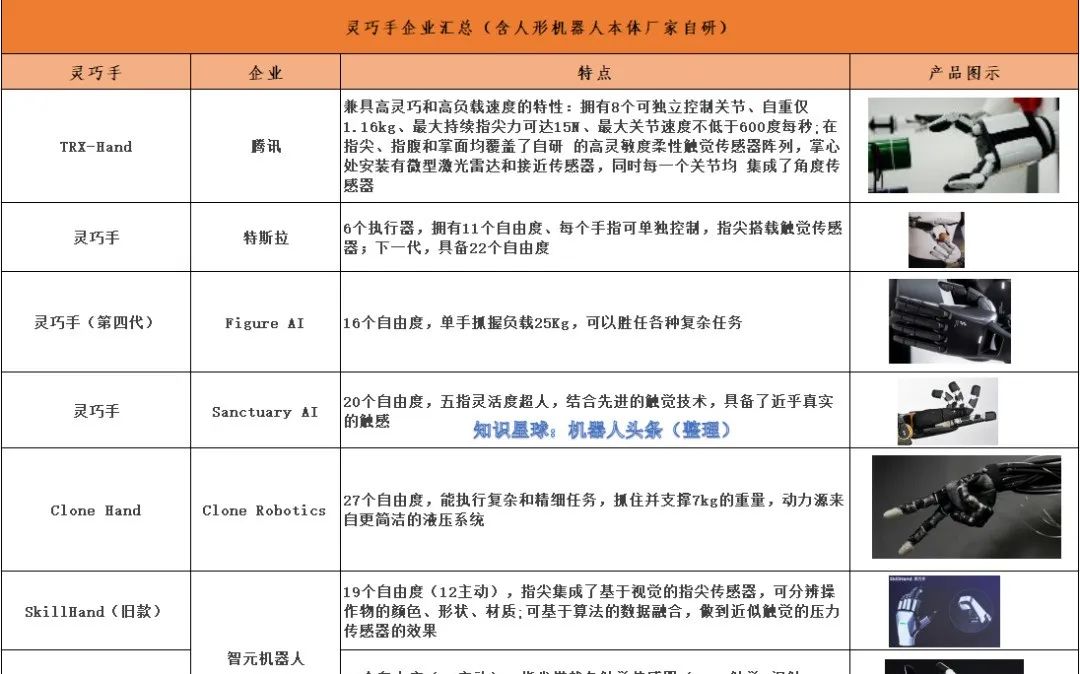

注:完整版表格,前往“机器人头条”知识星球查看
灵巧手专利(仅展示部分):
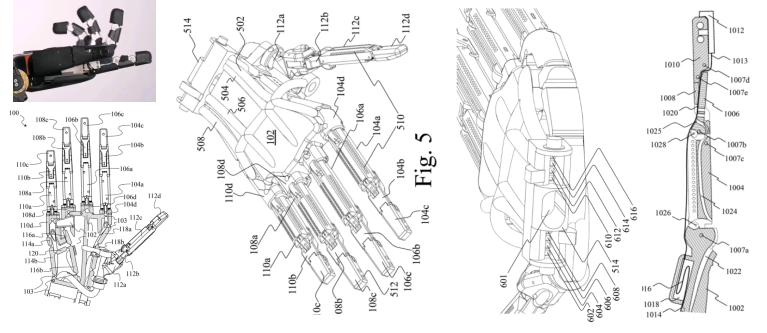
特斯拉“Optimus”灵巧手
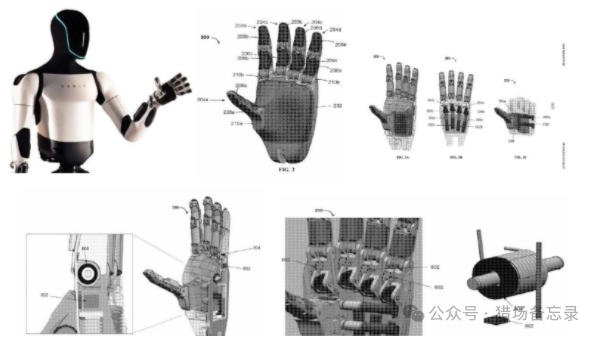
图片来源:WO2024/073138 A1
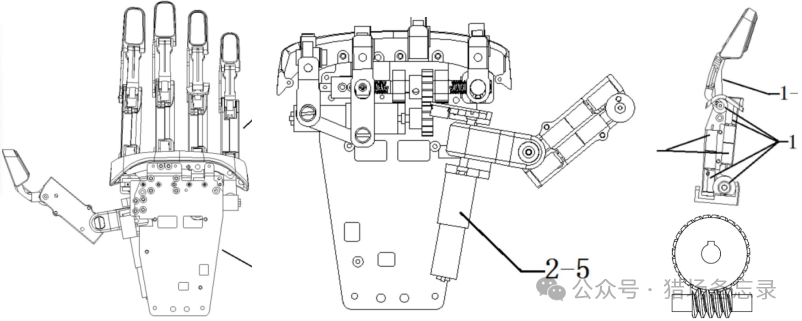
Sanctuary AI旗下“Phoenix”灵巧手
图片来源:US 2023/0234242 A1
智元机器人-灵巧手(新型专利):
图片来源:CN 220826015 U
小鹏汽车-机械手:
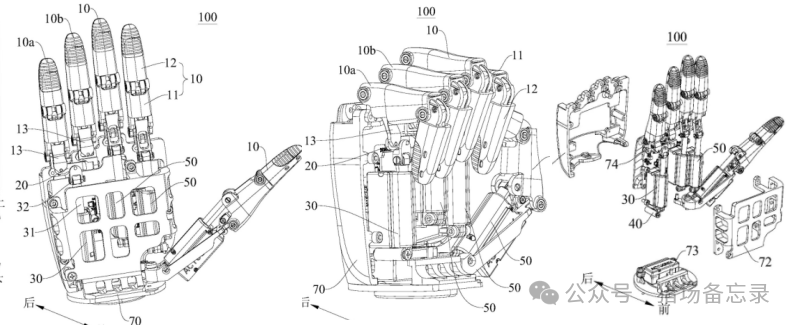
图片来源:CN 117359667 A
... ... ...
本文内容仅展示一部分,灵巧手企业及产品参数完整版整理表格、人形机器人企业灵巧手完整版专利,关注GZH"Robot猎场备忘录",扫码加入知识星球“机器人头条”,,查看完整版文章:【原创】人形机器人本体厂家自研灵巧手、主流灵巧手产品合集,并深度了解“具身智能&人形机器人”赛道

















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









