






 本文提供了一个使用Proteus进行控制的代码实例,通过按键控制电机正反转及速度调节。采用C语言编程,利用8051单片机的P1口读取按键状态,并实现电机正反转及速度变化。
本文提供了一个使用Proteus进行控制的代码实例,通过按键控制电机正反转及速度调节。采用C语言编程,利用8051单片机的P1口读取按键状态,并实现电机正反转及速度变化。
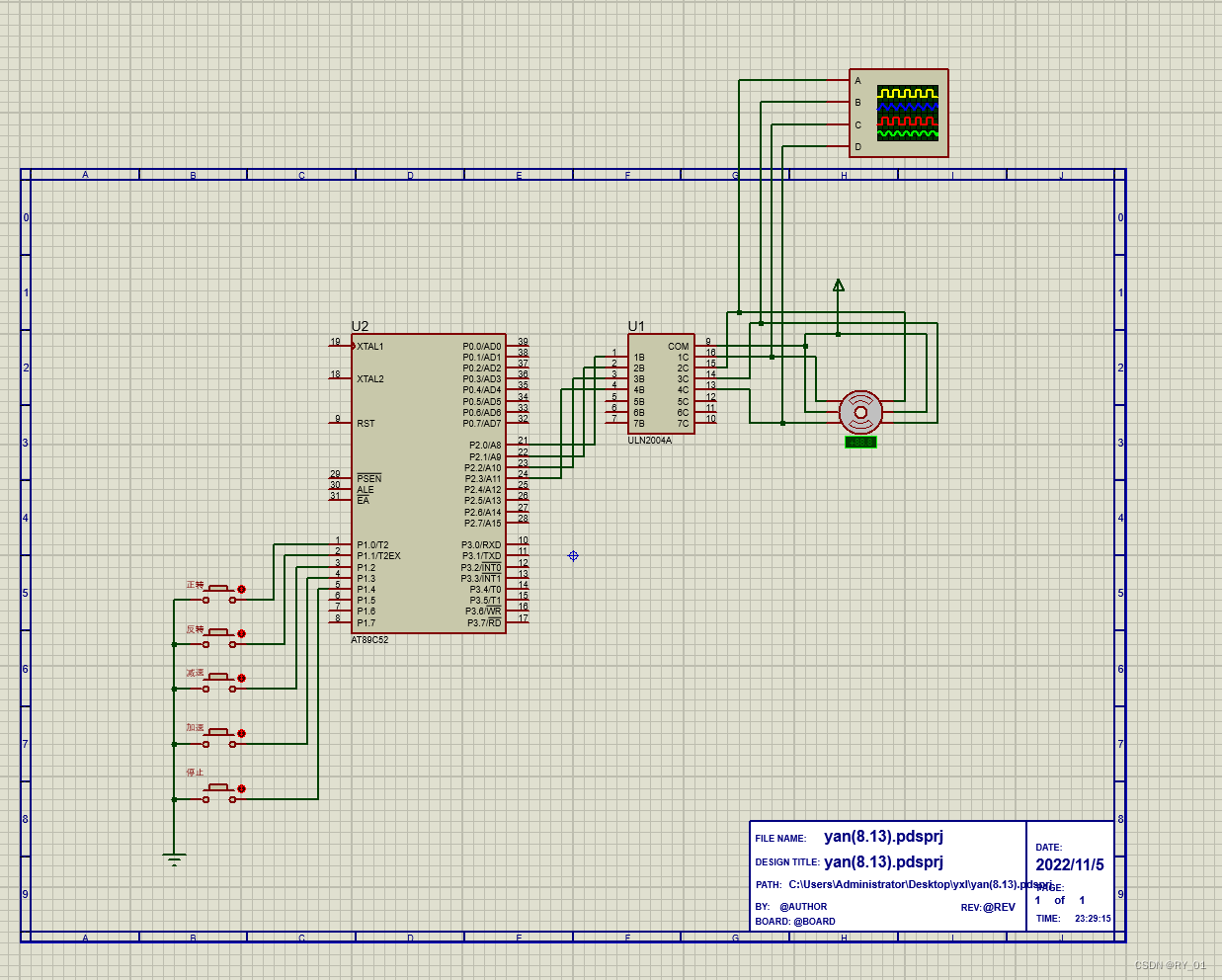
Proteus原理图
控制代码(人人都说goto的坏处,但是用起来真的很爽,hahaha~
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit key1 = P1^0;
sbit key2 = P1^1;
sbit key3 = P1^2;
sbit key4 = P1^3;
sbit key5 = P1^4;
uchar speed=65;
uchar code zheng[] = {0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01};
uchar code fan[] = {0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};
void delay1ms(uint t){
char i;
while(t--){
for(i=0;i<113;i++);
}
}
void main()
{
uchar i;
uchar button=0;
while(1){
if (key1==0){
button=1;
}
if (key2==0){
button=2;
}
if(button==1||button==2)
{
if(button==1)
{
zhengzhuan:for(i=0;i<8;i++){
if(key2==0) {button=2;goto fanzhuan;}
P2 = fan[i];
delay1ms(speed);
if(key5==0||key3==0||key4==0) goto next;
}
}
if(button==2)
{
fanzhuan:for(i=0;i<8;i++){
if(key1==0) {button=1;goto zhengzhuan;}
P2 = zheng [i];
delay1ms(speed);
if(key5==0|| key3 == 0 || key4 == 0) goto next;
}
}
}
next:if (key3==0){
speed = speed + 5;
if (speed>100) speed = 100;
}
if (key4==0){
speed = speed - 5;
if (speed<40) speed = 40;
}
if(key5==0)
{
button=0;
}
}
}

















 590
590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









