



(图片来源:网络)
近期,澳大利亚量子技术公司Q-CTRL表示正在与IBM合作,以提高Q-CTRL量子计算平台的性能和效率。
Q-CTRL表示,其Q-CTRL Embedded软件现已作为IBM“按需付费”计划中的一环,此次合作代表第三方独立软件供应商的技术解决方案首次可供IBM的用户在其“按需付费”流程中进行选择。
两家公司共同表示,通过此次合作,它们为用户提供了更多的实用功能,这将有助于解决量子计算领域面临的主要挑战之一——量子算法的不可靠性问题。
Q-CTRL认为,操作量子计算机并不容易。用户需要具备深厚的专业知识,包括熟练掌握算法、编译器、量子错误抑制和缓解等方面的技能。若没有这些专业知识的储备,将难以从任何一台量子计算机中获得可靠的结果。
而这就是Q-CTRL可以提供帮助的地方,该公司在今年1月获得B+轮融资2740万美元(折合人民币2亿元)。该公司已经开发了专业软件,通过为其提供稳定的“量子比特”来帮助解决量子不可靠问题。
但现有量子计算机都非常脆弱。
例如,为了保持IBM量子计算机中量子比特的稳定性,必须将其放置在接近绝对零度的超低温稀释制冷机中。然而,即使在这样的低温下,它的系统运行时间仍然相对较短,随后计算便开始出现错误。而借助Q-CTRL软件的支撑,用户可以维持这些量子比特的稳定性。
Q-CTRL Embedded软件的工作原理是在一个光滑的仪表板上可视化量子比特从而处理错误,同时深入了解导致这些错误的原因。利用这一工具,工程师们可以重新编程,以纠正错误。
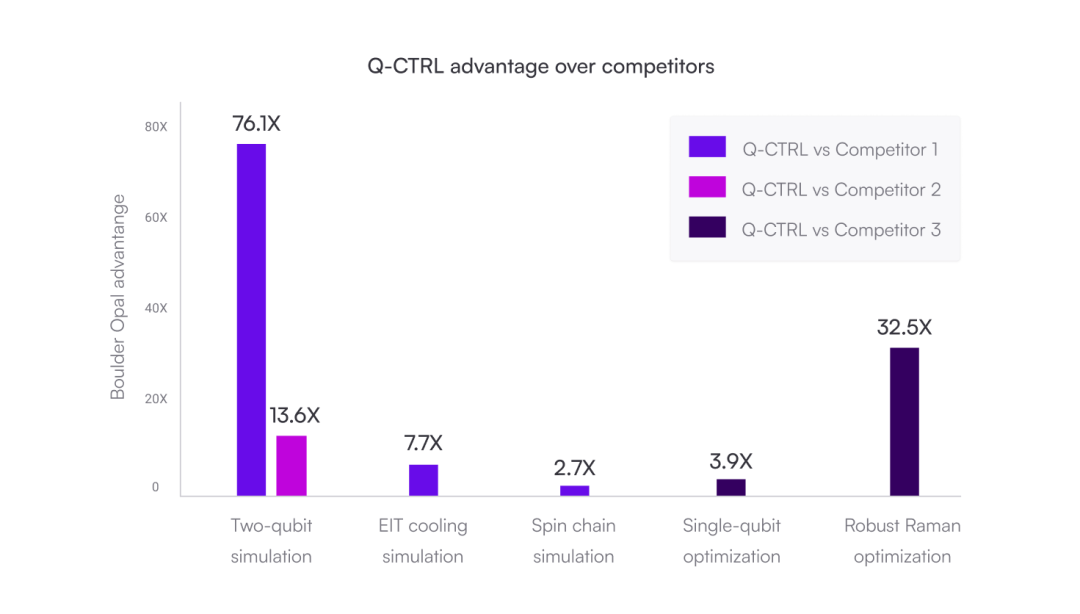
Q-CTRL表示,通过这种方式,它的软件可以使量子计算机更加可靠。在此次演示中,该软件可以将量子算法的性能提高25倍。
Q-CTRL Embedded软件的第二个优势在于可应用量子传感技术。量子传感是利用量子力学原理来实现超高灵敏度的传感技术,其优势在于其超高的灵敏度和精确度。通过利用量子叠加态和量子纠缠等现象,量子传感可以实现对微小能量、力量、磁场、光强、温度等物理和化学量的测量。
该技术基于捕获的原子,具备广泛的应用潜力,如精确勘测地下水源、实时监测天气状况,以及无需全球定位系统即可在地球上的任何地方进行导航。
但是,量子传感与标准量子计算一样容易出错。而Q-CTRL公司的软件有助于解决这一问题,进而可以提升该技术的应用准确性和可信度。
IBM公司表示,它们决定将Q-CTRL的软件与量子计算服务一起使用,这是对该软件有效性的一个重要验证,同时它们还将致力于帮助用户将有效的量子计算技术整合到工作流程中。
IBM“按需付费”服务的用户现在可以通过Qiskit环境使用单一命令运行Q-CTRL的软件,无需支付额外费用。
Q-CTRL创始人兼首席执行官Michael Biercuk表示,该公司自2018年成立以来,一直在开发和微调其量子控制软件。他说:“IBM的量子计算平台是这家公司展示其软件有效性的理想平台,这次合作将极大地提高实用量子算法的成功率。”
当IBM的用户激活Q-CTRL的软件时,它将在后台触发一个完全配置的自主工具链,从而自动抑制量子错误。根据同行评议研究,该初创公司声称,与其他减少错误的策略相比,该量子算法将可运行的复杂性提高了10倍,成本降低至1/100,这一成果的实现得益于减少了抑制错误所需的实验“射击”次数。此外,该软件还显著提高了量子算法的整体成功率,增长幅度高达1000倍。
(图片来源:网络)
美国投资公司Constellation Research分析师Holger Mueller表示,IBM与Q-CTRL的此次合作表明,新兴的量子计算市场正在日益成熟,IBM等关键供应商在其量子堆栈中引入了关键层。
IBM表示,Q-CTRL软件的集成将使其能加速实现量子优势,即量子计算机超过当今最强大的超级计算机的能力。
IBM研究员兼副总裁Jay Gambetta则表示,公司的目标是让用户能够运行在经典计算机上无法运行的有价值的量子工作负载。他进一步解释称:“其中一个核心要求是减少噪声,而Q-CTRL的管理软件提供的噪声抑制能助力探索更有用的量子电路。”
编译:琳梦/卉可
编辑:慕一
特此说明:量子前哨翻译此文仅作信息传递和参考,并不意味着同意此文中的观点与数据。
欢迎添加我们的微信,加入量子前哨粉丝群
与大家一起探讨交流量子领域动态↓↓↓~~

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









