



澳大利亚新南威尔士大学的研究表明,使用现代版本的“麦克斯韦妖”,可将量子比特重置为“0”态的错误减少了20倍。

Andrea Morello教授解释了麦克斯韦妖思想实验如何与他的团队通过仅选择冷电子进行量子计算的成就相类比。(图片来源:新南威尔士大学)
澳大利亚新南威尔士大学的一个量子团队开发了一种重置量子计算机的方法。所谓“重置”也就是制备一个处于“0”状态的量子比特,这种新方法具有很高的置信度,这是可靠的量子计算所需要的。该方法出奇地简单:它与一种叫做“麦克斯韦妖”的热力学思想实验有关,在这个150年前由英国著名物理学家詹姆斯·麦克斯韦提出的思想实验中,麦克斯韦妖可以通过观察单个分子的速度,从而违反热力学规律将气体分离成冷热气体。
“在这里,我们使用了一个更现代的‘小妖’:一个快速数字电压表——来观测从‘温暖’的电子池中随机抽取的电子的温度。在这一过程中,我们使它比池子更冷,这对应于它处于'0'计算状态的高度确定性,“领导该团队的新南威尔士大学的Andrea Morello教授说。
“量子计算机只有在以极低的错误率得出最终结果时才有用。我们可以拥有近乎完美的量子运算过程,但如果从错误的初始代码开始计算,最终的结果也是错误的。我们的数字‘麦克斯韦妖’让我们在设置计算初态的准确度方面提高了20倍。”该研究发表在美国物理学会出版的期刊《Physical Review X》上。
通过观测使电子变冷
Morello教授的团队首创使用硅原子中的电子自旋来编码和操纵量子信息,并在执行量子操作时展示了创纪录的高保真度——即错误率非常低。而目前用电子进行有效量子计算的最后一个障碍,就是在已知状态下制备电子作为计算起点时的保真度。
“准备电子量子态的一般方法是使用接近绝对零度的极低温,并希望电子全部弛豫到低能量的‘0’态,”该论文中的首席实验作者Mark Johnson博士解释道。“不幸的是,即使使用最强大的制冷机,我们仍有20%的机会错误地制备处于‘1’态的电子。这没法用作量子计算,所以我们必须做得更好。”
Mark Johnson博士毕业于新南威尔士大学电气工程专业,他决定使用一种非常快速的数字测量仪器来“观察”电子的状态,并使用仪器内部的实时决策处理器来决定是否保留该电子并使用它用于进一步的计算。这一过程的效果是将错误率从20%降低到1%。
旧瓶装新酒
Morello教授说:“当我们开始写下我们的结果,并思考如何最好地解释它们时,我们意识到——我们做出了一个现代版本的‘麦克斯韦妖’。”
“麦克斯韦妖”的概念可以追溯到1867年,当时詹姆斯·麦克斯韦(James Clerk Maxwell)设想了一种能知道气体中每个分子速度的小妖精。它会拿一个装满气体的盒子,中间有一堵隔墙,还有一扇可以快速开关的门。根据不同分子的速度,小妖可以选择是否打开大门,让慢(冷)分子汇聚在一侧,而快(热)分子汇聚在另一侧。
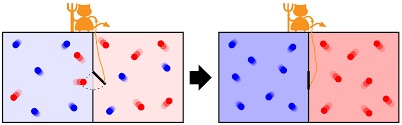
“麦克斯韦妖”的概念(图片来源:网络)
“这个小妖是一个思想实验,旨在讨论违反热力学第二定律的可能性,当然,从来没有这样的小妖存在过,”Morello教授说。
“现在使用快速数字电子技术,我们在某种意义上创造了一个麦克斯韦妖。我们让它负责只观察单个电子,并确保它尽可能冷。在这里,‘冷’直接转化为我们想要构建和运行的量子计算机处于‘0’状态。”
这一结果的意义对于量子计算机的可行性非常重要。它能提高量子计算机的容错能力,但前提是错误要足够少。错误容忍度的典型阈值约为1%。这包括了所有的错误,诸如准备、操作和最终结果的读出等。
这个电子版的“麦克斯韦妖”让新南威尔士大学团队将制备错误从20%减少到了1%,减少了20倍。(图片来源:网络)
Johnson博士说:“这过程仅使用了现代电子仪器,在量子硬件层中没有引入额外的复杂性。现在我们能以足够好的精度制备我们的电子量子比特,以便后面进行可靠的进一步计算。这是量子计算发展中的一个重要结果。非常奇特的是,它竟然源自一个150年前的想法!”
编译:王珩
编辑:慕一

















 1778
1778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









