




 本文详细介绍了霍夫圆检测的基本原理,包括从平面坐标到极坐标的转换过程,以及如何利用霍夫变换实现圆的检测。文章还强调了霍夫圆检测对噪声的敏感性,并提出使用中值滤波作为预处理步骤。最后,通过OpenCV的实现展示了如何在图像中检测圆,包括边缘保留滤波、圆心检测和半径计算。
本文详细介绍了霍夫圆检测的基本原理,包括从平面坐标到极坐标的转换过程,以及如何利用霍夫变换实现圆的检测。文章还强调了霍夫圆检测对噪声的敏感性,并提出使用中值滤波作为预处理步骤。最后,通过OpenCV的实现展示了如何在图像中检测圆,包括边缘保留滤波、圆心检测和半径计算。
霍夫圆检测原理
1、从平面坐标到极坐标转换三个参数C(x0,y0,r),其中x0,y0是圆心;
2、假设平面坐标的任意一个圆上的点,转换到极坐标中,C(x0,y0,r)处有最大值,霍夫变换正是利用这个原理实现圆检测;
3、因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波;
4、基于效率考虑,opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
①检测边缘,发现可能的圆心;
②基于第一步的基础上从候选圆心开始计算最佳半径大小;
x = a + Rcos(θ)
y = b + Rsin(θ)
from matplotlib import pyplot as plt
from cv2 import cv2 as cv
import numpy as np
def detect_circles_demo(image):
#边缘保留滤波 #也可用高斯滤波
dst = cv.pyrMeanShiftFiltering(image,10,100)
'''
scr:输入的8比特,3信道图像
dst:和源图像相同大小、格式的输出图像
sp:空间窗的半径
sr:色彩窗的半径
'''
cimage = cv.cvtColor(dst,cv.COLOR_BGR2GRAY)
circles = cv.HoughCircles(cimage,cv.HOUGH_GRADIENT,1,20,param1=50,param2=28,minRadius=0,maxRadius=0)
circles1 = np.uint16(np.around(circles))#转换成整数
for i in circles1[0,:]:
cv.circle(image,(i[0],i[1]),i[2],(0,0,255),2)#画圆
cv.circle(image,(i[0],i[1]),2,(255,0,0),2)#圆心
cv.imshow("circles",image)
if __name__ == "__main__":
filepath = "C:\\pictures\\Test paper\\unqualified\\unqualifed-1.jpg"
img = cv.imread(filepath) # blue green red
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE)
cv.imshow("input image",img)
detect_circles_demo(img)
cv.waitKey(0)
cv.destroyAllWindows()
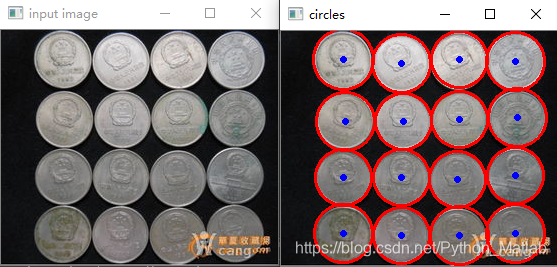
结果如下:


















 2210
2210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











