




探头的延时是指信号从被测点传输到示波器输入端的时间间隔,即信号经过探头的探针、传输电缆、内部电路等路径后,到达示波器采样系统的总时间延迟,(以下讨论低速信号情景,忽略示波器通道间ps级的延时误差)。不同型号的探头延时存在差异,尤其是有源探头和无源探头混用,相对延迟较大时,会在示波器上看到波形错位现象。
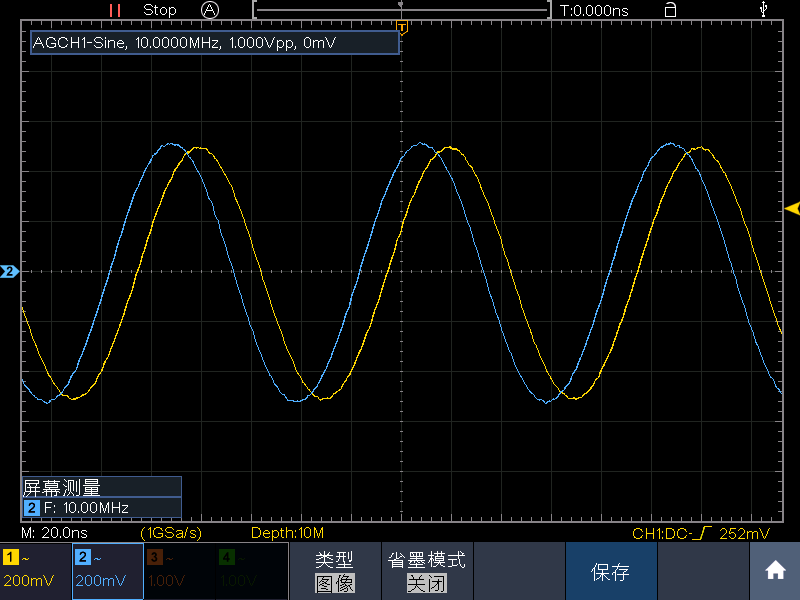
有源探头(CH1)与无源探头(CH2)同时测量10MHz正弦波时出现错位现象
影响探头延时的因素有很多,比如连接线的材质、长度、探头的内部电路等,在进行多通道同步信号测量时,需先测量不同探头的相对延时,对于高速信号(如高频脉冲、高速数字信号等)的多通道同步测量,除了探头本身的延时差异,示波器自身通道间的固有延时也需关注,以免影响信号的特性分析。
可以选择信号发生器产生快沿脉冲信号或者示波器自带的方波信号测量不同探头的相对延时,一般在示波器的前面板处有校准信号输出端,会输出校准方波,可用于示波器探头的校准。只需要将探头同时接入同一信号源,可以通过调整光标进行手动测量两通道波形的时间差,也可以使用测量功能中的上升沿/下降沿延迟测量,自动识别两个通道信号的特征点并计算时间差。图中被测信号由信号发生器产生,频率1kHz,峰峰值1Vpp的方波,用光标手动测量波形的上升沿延迟为11.2ns,自动测量上升沿延迟为10.2ns,代表双通道间信号的相对延时。
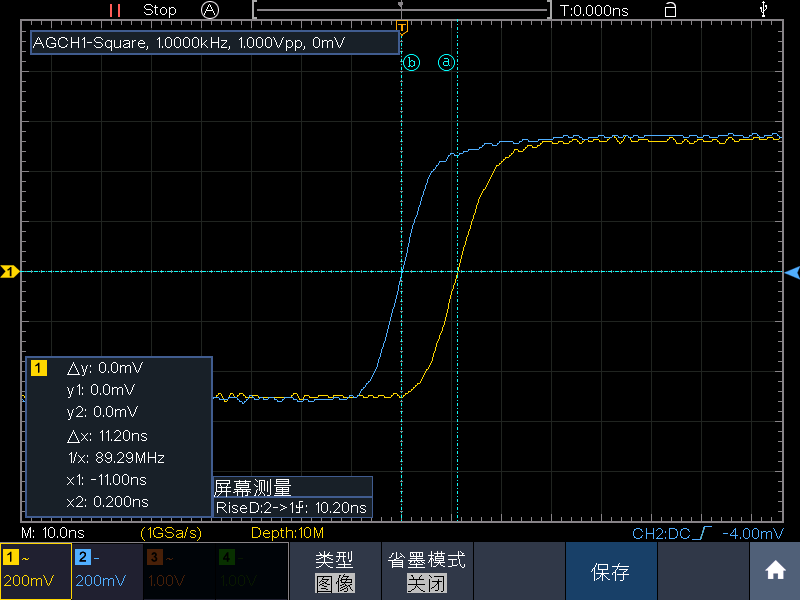
不同探头测试同一方波对比

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









