




压摆率是什么?压摆率是衡量运放输出端电压变化“速度极限”的关键指标。如果输入信号要求的变化速度超过了这个极限,输出波形就会失真变形。
以下是LM358DT的数据手册上的一个图,通过这个图了解一下压摆率的具体表现。
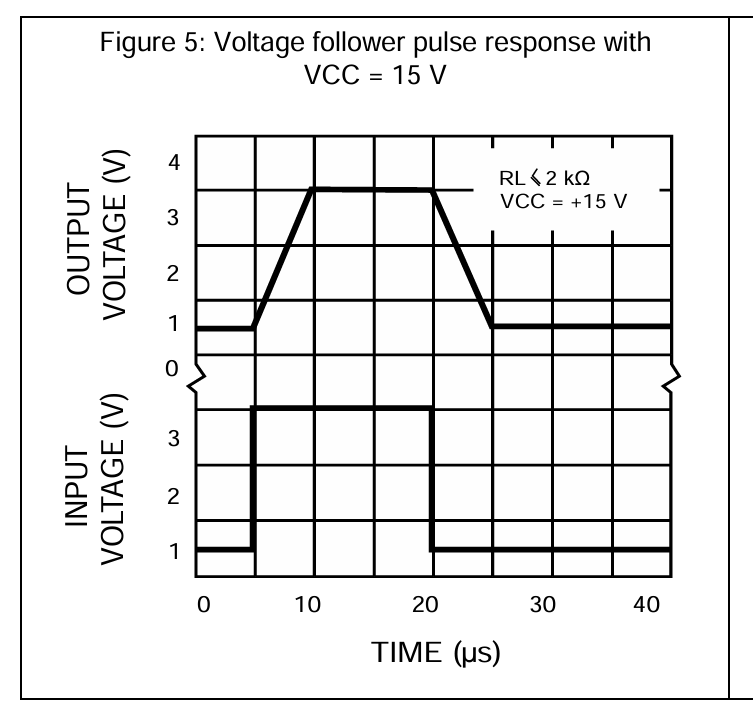
图1 LM358DT电压跟随器阶跃响应
运算放大器LM358DT数据手册上给到的压摆率slew rate为典型值0.6V/us,最小值0.3V/us。该图上所示,在5us时输入脉冲信号,输出信号开始从0.5V爬升,爬升到与脉冲信号一致的电压3V时时间为10us,因此计算出该图所示压摆率为(3V-0.5V)/(10us-5us)=0.5V/us。输出信号的波形失真是因为输入信号要求的变化速度为无穷大,超过了这个运算放大器的“速度极限”,因此造成了OUTPUT波形的失真。
再来看一个压摆率更高的运算放大器OPA182IDR,该运算放大器的压摆率典型值为10V/us。
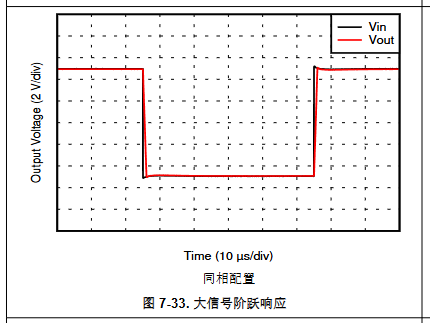
图2 OPA182IDR电压跟随器阶跃响应
对比该两个波形图可以看出,压摆率高的运算放大器失真程度更低,更接近与输入信号。因此想要更好的还原信号原来的波形,压摆率越大越好。
相应的,示波器/探头带宽更高的,其还原脉冲信号的压摆率也越大,还原程度也更接近于原波形信号。当然,这并不意味着一味的追求示波器与探头的带宽。如果原波形的变化速度较慢,如几十kHz正弦波类型的信号,使用200kHz的探头可以满足还原被测信号压摆率的需求的情况下,就不必去花更大的价钱去购买20MHz或更高带宽的探头进行测量。

















 6179
6179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









