




光刻胶配套试剂
一、光刻胶用光敏剂种类与组成
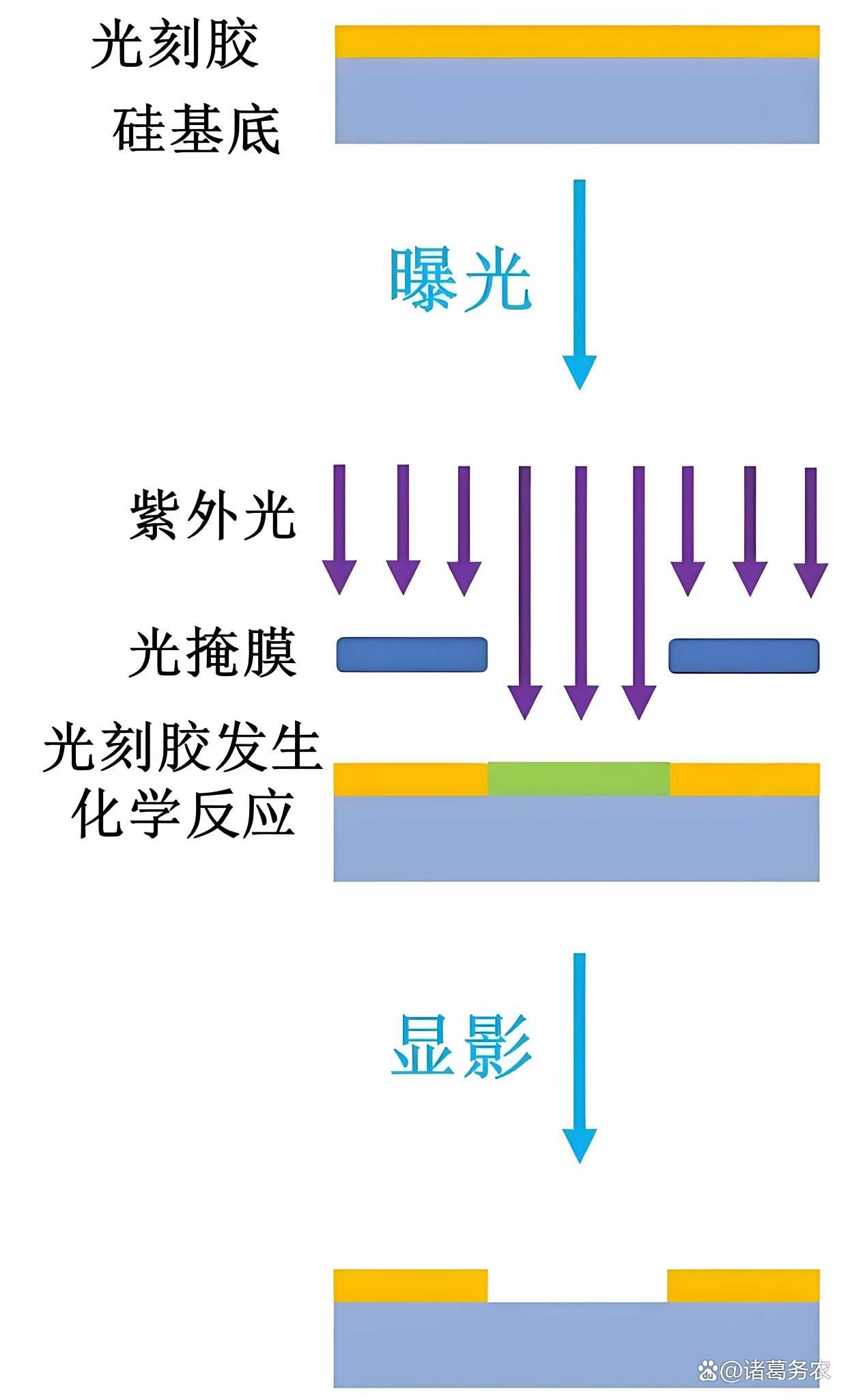
光敏剂是光刻胶中的关键成分,其主要作用是在特定波长的光照下发生化学反应,从而改变光刻胶在显影液中的溶解性,实现图形从掩膜版到基底的转移。
(一)光敏剂的主要类型
光敏剂根据其作用机理和适用光刻胶类型的不同,主要可以分为以下几类:
1. 重氮萘醌(DNQ)类化合物
主要成分:通常是2-重氮-1-萘醌-5-磺酰氯(或其它磺酰氯变体)与各种羟基化合物(如酚醛树脂、特定的酚类化合物)通过酯化反应得到的磺酸酯类衍生物 。
作用机理:常用于正性光刻胶。未曝光时,DNQ作为溶解抑制剂,降低树脂在碱性显影液中的溶解度;曝光后,DNQ发生Wolff重排反应,生成烯酮并进一步水解为羧酸,从而使曝光区域变得可溶于碱性显影液 。
应用范围:主要应用于g线(436 nm)和i线(365 nm) 光刻工艺。
2. 光致产酸剂(PAG)
主要成分:主要包括鎓盐类(如二芳基碘鎓盐、三芳基硫鎓盐的六氟锑酸盐、六氟砷酸盐、六氟磷酸盐等)和非离子型化合物(如重氮盐、磺酸酯等) 。
作用机理:用于化学放大型光刻胶(CAR)。PAG在吸收光子后产生强酸(如H⁺)。在后续的曝光后烘焙(PEB)过程中,这种酸作为催化剂,催化树脂发生去保护基等化学反应,从而显著改变树脂在显影液中的溶解度(一个酸分子可催化多个反应,故称“化学放大”) 。
应用范围:是KrF(248 nm)、ArF(193 nm)、EUV(13.5 nm) 等先进光刻胶的核心光敏成分 。
2. 游离基光引发剂
主要成分:包括安息香及其醚类(如安息香二甲醚)、二苯甲酮类、烷基苯酮类等 。
作用机理:吸收光能后产生自由基,引发树脂(如丙烯酸树脂、肉桂酸酯类树脂)的交联聚合反应,使曝光区域变成不溶物(负性光刻)4。
应用范围:更多用于一些特殊光刻工艺(如部分纳米压印光刻胶、紫外光固化刻蚀胶)。
3. 其他特殊光敏剂
例如在聚乙烯醇肉桂酸酯负性光刻胶中使用的5-硝基苊作为增感剂 。在聚酰亚胺光刻胶中,也会使用DNQ作为光敏剂 。
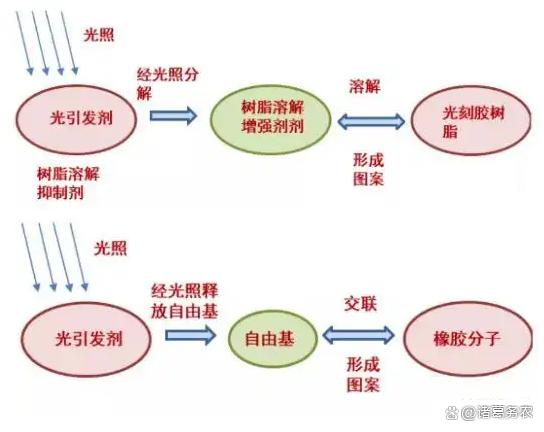
光刻胶光分解和光交联示意图
(二)光敏剂的组成特点
1. 高纯度:
半导体级光敏剂对金属杂质含量(如Na、K、Fe等)要求极严,通常需小于1 ppb(十亿分之一),以避免对半导体器件性能造成不良影响 。
2. 结构与性能关联:
光敏剂的分子结构直接影响其吸收波长、光敏效率(灵敏度)、产酸量/产酸强度、储存稳定性等。例如,通过化学修饰可以调整其吸收特性以匹配特定光源 。
3. 与树脂的配伍性:
光敏剂需要与树脂基体具有良好的相容性,以避免析出并保证光刻胶成分的均匀性和稳定性 。
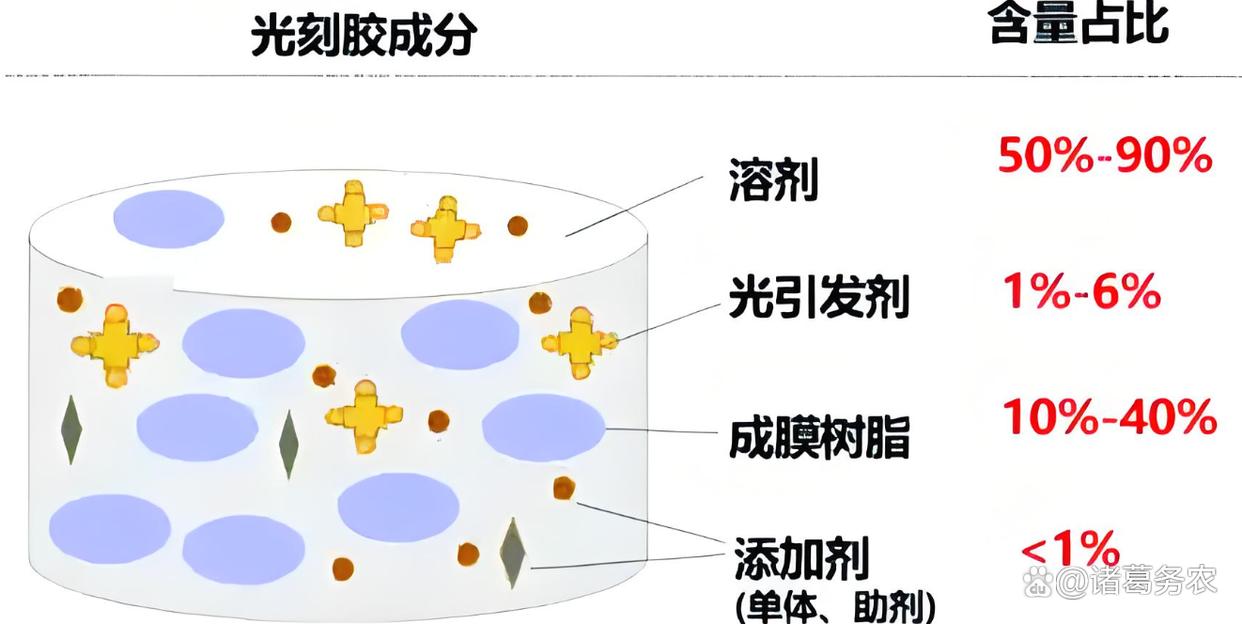
光刻胶主要成分
二、光刻胶常见添加剂及其主要成分
除了树脂和光敏剂,光刻胶中还包含多种添加剂,用以优化其涂布性能、稳定性、图形化质量等。
-
添加剂种类及成分
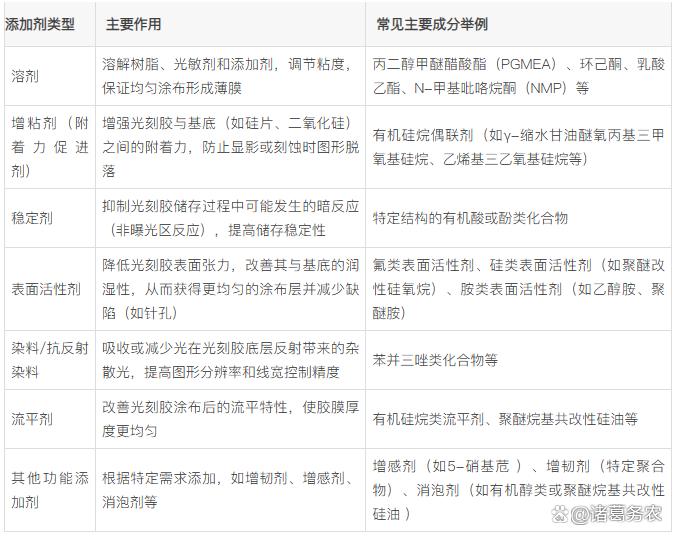
光刻胶用主要添加剂种类及其组成成分
2. 添加剂的使用权衡
添加量少,作用大:添加剂虽然在光刻胶中占比很小(通常百分之几甚至更低),但对光刻胶的性能至关重要,不可或缺。
相容性与副作用:添加剂的加入不能影响光刻胶的光敏特性、分辨率等核心性能,也不能引入有害的金属杂质或导致胶体不均匀 。
配方平衡:光刻胶的配方是一个复杂的体系,各种成分需要精细平衡,才能达到最佳的综合性能。不同应用场景(如I线、KrF、ArF)、不同厂商的光刻胶配方往往各不相同,具有很高的技术壁垒。
化学放大光刻胶
三、总结与展望
光刻胶中的光敏剂(如DNQ、PAG)和添加剂(如溶剂、附着力促进剂、表面活性剂等)虽然在实际配方中占比不同,但它们共同决定了光刻胶在特定波长下的灵敏度、分辨率、对比度、附着力、抗蚀性以及工艺宽容度等关键性能。
目前,高端光刻胶技术(尤其是KrF、ArF、EUV及其配套的光敏剂和添加剂)主要由少数国际化工巨头主导。对于国内产业而言,实现光刻胶用树脂、光敏剂(特别是高性能PAG)、高纯度添加剂以及配方技术的突破,是摆脱对外依赖、推动半导体产业链自主可控的关键环节 。
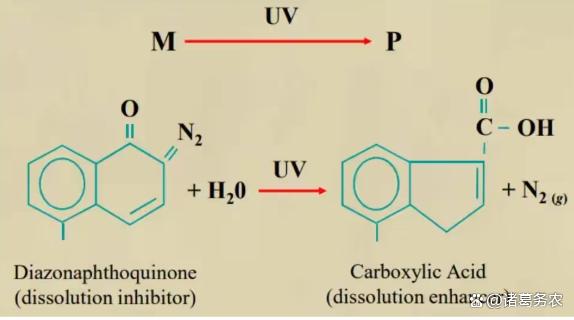
重氮萘醌(DNQ)的光刻反应
【免责声明】本文主要内容均源自公开资料和信息,部分内容引用了Ai。仅作参考,不作任何依据,责任自负。


















 115
115




 到【灌水乐园】发言
到【灌水乐园】发言









