



之前玩多普勒雷达时,发现毫米波雷达在某些方面更具优势,那会儿挺贵的,现在随着智驾平权,毫米波雷达的价格也逐渐亲民了,带动相关产业的发展,其它应用场景的价格也大幅下降。前些天就在海鲜市场淘了几个毫米波雷达模块。
先上图:
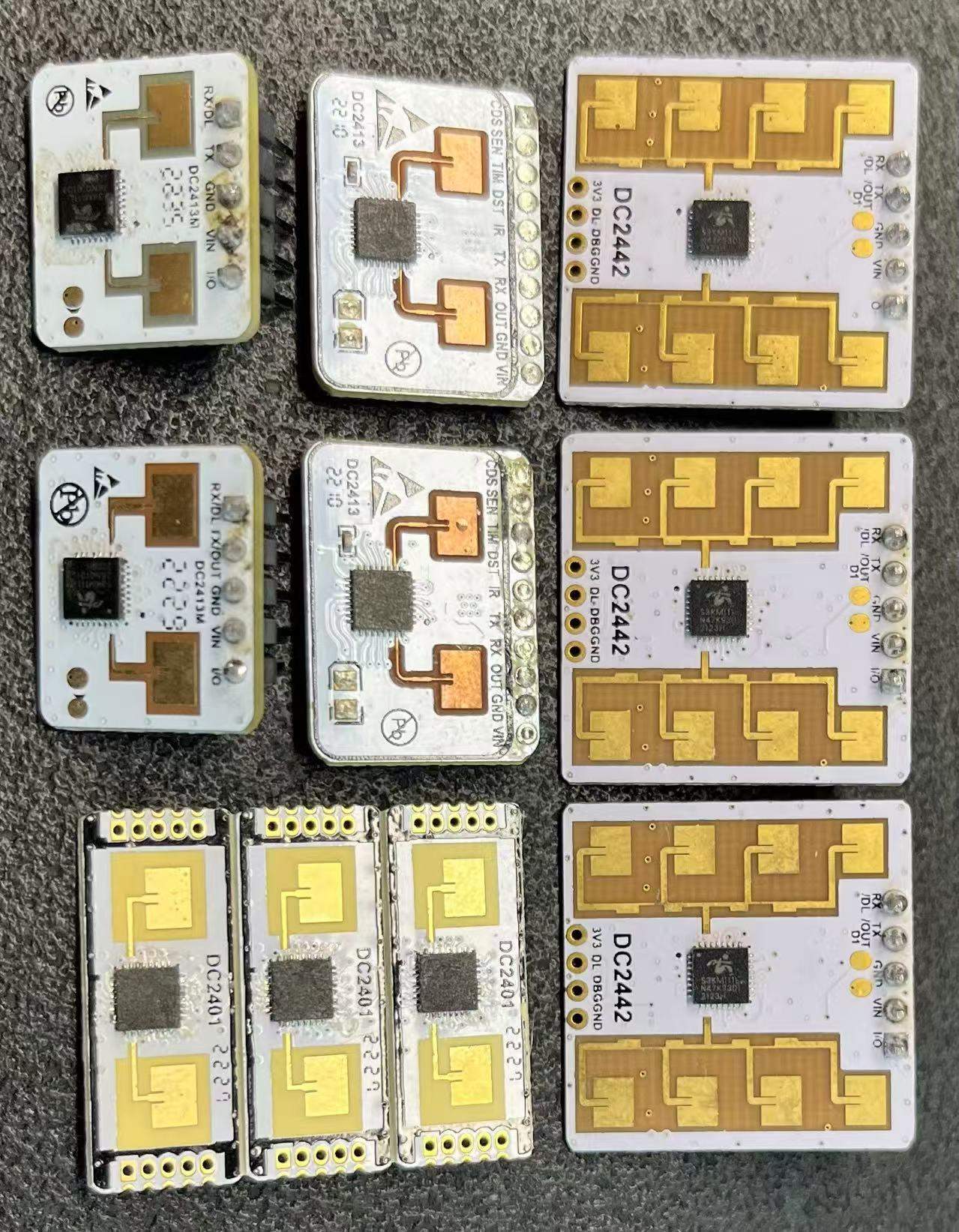
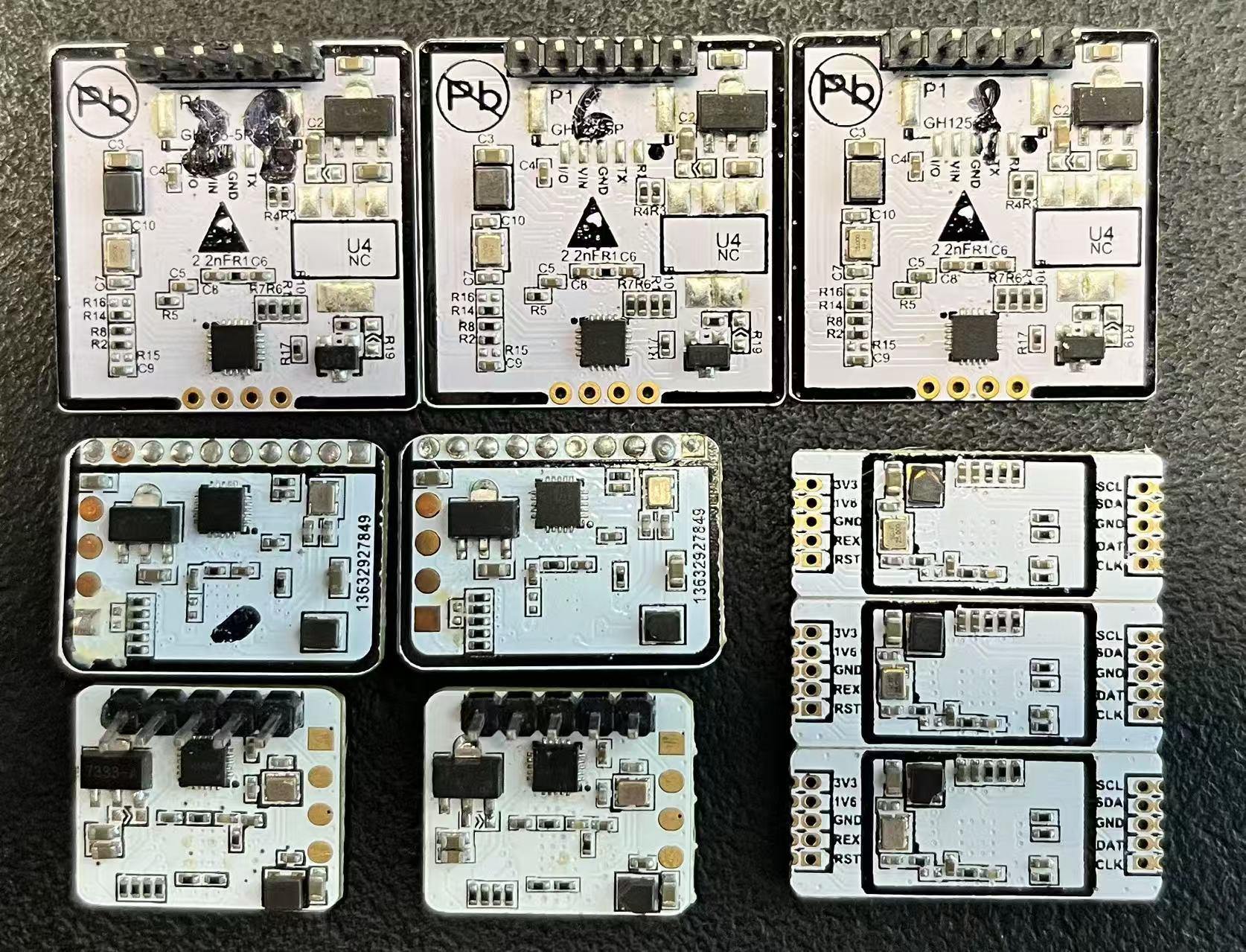
这些模块应该来自同一公司,具体名字就不说了,没给广告费😀
看样子主要用于智能家居、人体检测等场景,比如智能马桶、手势识别、自动感应门、安防监控、车位检测、照明控制等,都是24GHz频段的。
模块非常小巧,适合嵌入各种设备中。单发单收,可以测距离和速度,但测不了方位角。
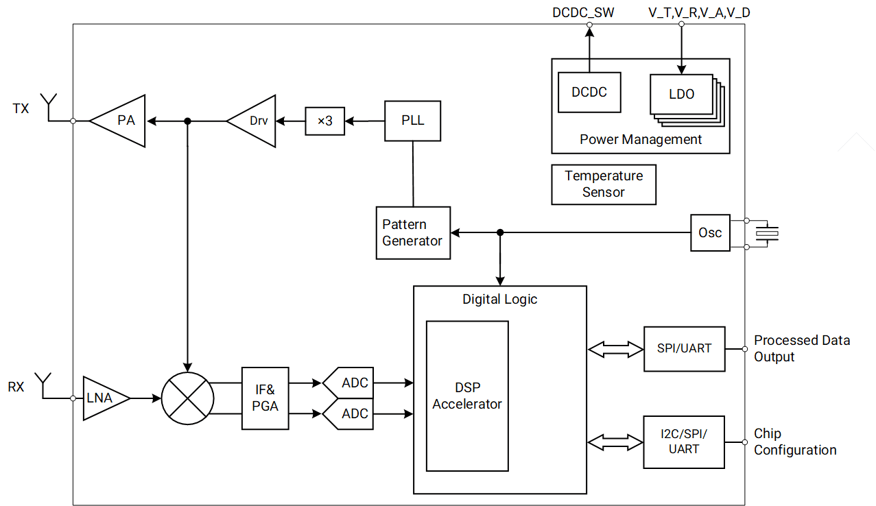
毫米波芯片为S3KM111L,S3KM111L是矽典微单发单收智能毫米波传感器SoC,专为AIoT应用场景定制开发,小尺寸、低功耗、易用亲民的特点,赋能多样的智能传感器设计。芯片采用CMOS全集成架构,搭建完整的毫米波传感器系统功能模块,提供灵活的波形、功率和增益配置,内置电源管理和算法硬件加速,简单易用助力开发者快速实现毫米波传感器方案。
S3KM111L芯片简介
S3KM111L是由矽典微(ICLegend)推出的K波段智能毫米波传感器SoC,专为AIoT(人工智能物联网)应用场景定制开发。该芯片具有小尺寸、低功耗和易用性强的特点,为智能传感器设计提供了极大的便利,适合多样化的应用需求。
1. 主要特性
- 1T1R架构:内置1个发射通道(TX)和1个接收通道(RX),满足基础测距与测速度需求。
- 全集成CMOS架构:集成PLL、TX、RX和ADC模块,简化设计,提升系统集成度。
- 硬件加速:内嵌DSP硬件加速单元,最小化片外信号处理压力。
- 灵活配置:提供波形、功率和增益等多种参数灵活配置选项。
- 低功耗设计:内置电源管理模块,仅需3.3V单电源供电。
- 丰富接口:支持I2C、SPI、UART等多种外设接口,方便系统集成。
2. 主要参数
| 参数 | 数值 |
|---|---|
| 通道数 | 1发射,1接收 |
| 带宽 | 1 GHz |
| TX最大发射功率 | 12 dBm |
| RX噪声系数(含ADC) | 10.5 dB |
| PLL相位噪声(1MHz偏移) | -97 dBc |
| 封装 | QFN 4mm x 4mm |
S3KM111L适用于智能家居、安防监控、健康检测、手势识别等多种场景,是各类毫米波智能感知系统的理想基础部件。
FMCW毫米波雷达测距测速原理
S3KM111L芯片通常用于FMCW毫米波雷达方案。FMCW(Frequency-Modulated Continuous Wave,调频连续波)是一种主流的毫米波雷达信号调制方式,广泛应用于测距、测速和目标检测。
1. FMCW基本原理
FMCW雷达通过发射频率随时间线性变化(即“调频”)的连续波信号,并接收目标反射回来的回波信号。通过比较发射信号与接收信号的频率差(称为“中频”或“拍频”),可以精准测量目标距离与速度。
具体步骤如下:
- 发射端发出频率随时间线性变化的连续波信号(通常为锯齿波或三角波)。
- 目标物体反射部分能量,回波信号被接收端捕获。
- 由于信号传播有延迟(距离越远,延迟越大),接收信号相对于当前发射信号有一定频率偏移。
- 发射信号与接收信号进行混频,得到拍频信号(中频信号),其频率与目标距离成正比。
2. 距离测量(测距)
拍频(中频)信号的频率与目标距离成正比,公式如下:
f I F = 2 B R c T f_{IF} = \frac{2BR}{cT} fIF=cT2BR
其中:
- f I F f_{IF} fIF:中频信号频率(拍频)
- B B B:调频带宽(如S3KM111L为1 GHz)
- R R R:目标距离
- c c c:光速
- T T T:调频周期
通过检测中频信号的频率即可反推出目标距离。
3. 速度测量(测速)
如果目标在运动,会产生多普勒频移。FMCW雷达通过对上升沿和下降沿的拍频分别测量,可以分离多普勒分量和距离分量,实现同时测距和测速。
- 多普勒频移与目标径向速度成正比。
- 通过分析拍频随时间的变化或正反扫频的频率差,提取速度信息。
4. 优势
- 高精度:带宽越大,距离分辨率越高。S3KM111L的1 GHz带宽可实现极高精度测距。
- 抗干扰能力强:连续波信号不易受外界噪声影响。
- 集成度高:FMCW方案可在单芯片实现发射、接收和信号处理,简化系统设计。
应用场景举例
依托S3KM111L芯片的高集成度和FMCW技术,开发者可以快速推出以下智能传感应用:
- 智能家居中的存在检测与安全防护
- 智能门锁、自动门的人体感应
- 智能健康监测(如呼吸/心跳微动检测)
- 智能马桶、智能灯光的手势交互
- 无人零售、安防监控等场景下的目标测距与跟踪
这几个模块上除了毫米波芯片,还有mcu,丝印BP0K111,没找到具体型号,有知道的朋友留言指点下,感谢!
有点儿玩不动了,感兴趣的朋友付邮送模块了。
公众号 | FunIO
微信搜一搜 “funio”,发现更多精彩内容。
个人博客 | blog.boringhex.top

















 3641
3641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









