




 本文解析了Codeforces Round #578 (Div.2) C题“Round Corridor”的解决思路,通过计算最大公约数(gcd)来划分大圆圈成若干区间,判断两点是否位于同一区间,实现内外圈坐标间路径可达性的判断。
本文解析了Codeforces Round #578 (Div.2) C题“Round Corridor”的解决思路,通过计算最大公约数(gcd)来划分大圆圈成若干区间,判断两点是否位于同一区间,实现内外圈坐标间路径可达性的判断。
Codeforces Round #578 (Div. 2) - C. Round Corridor
Round Corridor
题意:
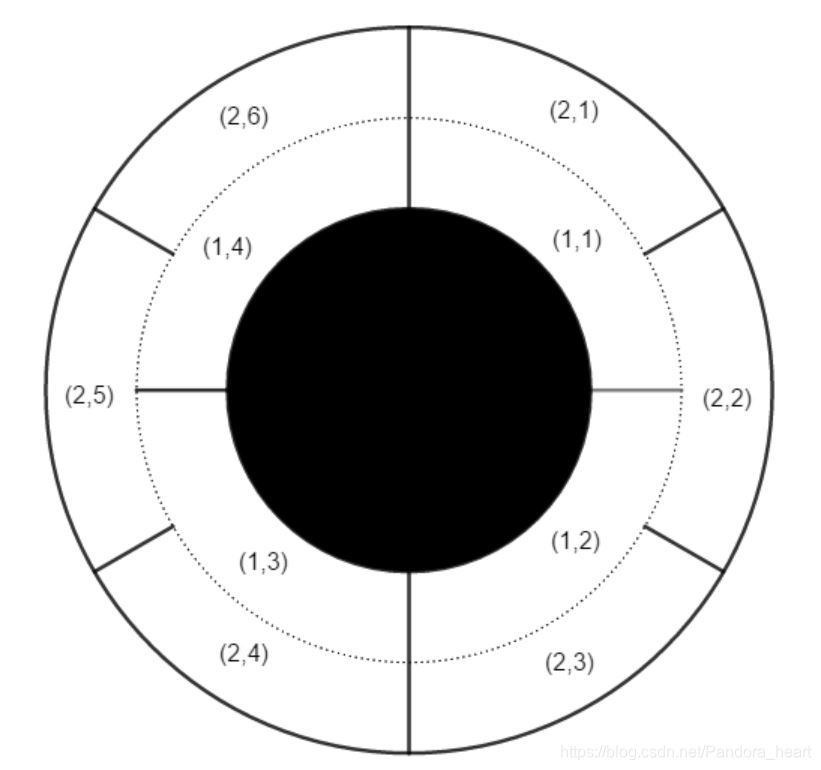
有个大圈圈,包括内圈和外圈两个区域,给定整数 n 、m ,把内圈均分成 n 部分,分别记为(1,i),1<=i<=n,外圈均分成 m部分,分别记为(2,i),1<=i<=m ,每部分由一堵墙分隔,并且 12 点钟的位置一定有墙,但是内圈和外圈之间是没有墙的,详情看图。 然后有 q次询问,每次询问给定两个坐标(sx,sy)、(ex,ey),一个在内圈,一个在外圈,问能否从(sx,sy)到(ex,ey),若能,则输出“YES”,否则,输出“NO”。
数据范围:
1≤n,m≤1018,1≤q≤104,1≤sx,ex≤2; if sx=1, then 1≤sy≤n,otherwise 1≤sy≤m,constraints on ey are similar
解题思路:
gcd
给大圈圈分区间,可以分成 gcd(n, m) 个区间,然后只要判断一下两个坐标是不是在同一个区间就哦可啦。对了,数据大,记得用 long long 。
判断坐标是否在同一区间:易知,内圈每 n/gcd(n, m) 个部分划分一个区间,外圈每 m/gcd(n, m) 个部分划分一个区间,区间都从 0 开始编号。若 sx=1(即坐标在内圈),那么(sx,sy)所在区间编号为 a=(sy-1)/=n/gcd(n, m) ;若 sy=2(即坐标在外圈),那么所在区间编号为 a=(sy-1)/=m/gcd(n, m) ,最后判断是否 a=b 即可。为什么要 sy-1 呢?想想看,sy 是从 1 开始标记的,假设内圈/外圈每 s 个部分划分一个区间,那么坐标(sx,1)~(sx,s)都是这个区间的,当 sy<s 时,sy/s=0,当 sy=s 时,sy/s=1 刚好整除,这样一来,明明是同一区间的坐标就会被误判为不同区间,所以要 sy-1,避免误判。
代码:
#include <iostream>
#include <cstdio>
#include <cstring>
#include <string>
#include <algorithm>
#include <cmath>
#include <stack>
#include <queue>
#include <vector>
#include <map>
using namespace std;
#define INF 0x3f3f3f
#define zero 1e-7
typedef long long ll;
const int N=105;
ll gcd(ll a, ll b) {
return (a%b ? gcd(b, a%b) : b);
}
int main() {
ll n, m, q, sx, sy, ex, ey;
scanf("%lld %lld %lld", &n, &m, &q);
ll g=gcd(n, m);
n/=g; m/=g;
while(q--) {
scanf("%lld %lld %lld %lld", &sx, &sy, &ex, &ey);
sy--; ey--;//要-1,
if(sx==1) sy/=n;
else sy/=m;
if(ex==1) ey/=n;
else ey/=m;
if(sy==ey)
printf("YES\n");
else
printf("NO\n");
}
return 0;
}

















 353
353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









