




树莓派可以单独处理视觉识别传输识别信号通过实现舵机控制这一分支功能,其他交给RK3588 。
一、树莓派与 RK3588 核心对比
1. 硬件性能(核心差异)
| 维度 | 树莓派(以 4B/5 为例) | RK3588(代表板卡:Firefly ROC-RK3588S) |
|---|---|---|
| CPU | 4B:四核 ARM Cortex-A72(1.8GHz)5:四核 Cortex-A76(2.4GHz) | 八核 64 位(4×Cortex-A76 + 4×Cortex-A55,主频 2.4GHz) |
| GPU | VideoCore VI(支持 OpenGL ES 3.1) | Mali-G610 MP4(支持 OpenGL ES 3.2/OpenCL 2.2) |
| NPU | 无(需外接 AI 加速模块) | 6TOPS INT8 算力(支持 AI 推理,如 YOLO / 路径规划加速) |
| 内存 / 存储 | 最大 8GB LPDDR4,MicroSD/USB 存储 | 最大 32GB LPDDR5,eMMC/NVMe/SD 卡(带宽更高) |
| 接口扩展性 | GPIO/USB3.0/CSI/DSI/Ethernet(千兆) | 多网口(2× 千兆 + 可选 2.5G)/PCIe 3.0/USB3.2/HDMI 2.1 / 多个 UART/CAN |
| 功耗 | 5V/2.5A(约 5-8W) | 12V 供电(约 10-20W,性能模式) |
| 实时性 | 普通 Linux 系统,实时性差(需打 PREEMPT_RT 补丁) | 支持 Linux RT 补丁,部分板卡提供硬实时核心,更适配工控场景 |
2. 适配无人车场景的核心结论
| 场景需求 | 树莓派适用情况 | RK3588 适用情况 |
|---|---|---|
| 轻量级路径规划(A*/Dijkstra) | 勉强支持(仅基础算法,无并发) | 轻松支持(可叠加多算法对比 + 实时优化) |
| 自主避障(激光雷达点云处理) | 仅支持低分辨率(如 16 线以下),帧率 < 10Hz | 支持 64/128 线激光雷达,实时点云聚类 / 障碍物检测(帧率 > 20Hz) |
| RTK 定位(数据解算) | 仅能接收 RTK 串口数据,解算依赖外接模块 | 可本地完成 RTK 解算(结合 NPU 加速),输出厘米级定位 |
| AI 辅助决策(如障碍物分类) | 需外接边缘计算模块(如 Google Coral) | 本地 NPU 完成 YOLOv8/PointPillars 推理,无需外接硬件 |
| 多设备并发控制(RTK + 雷达 + 云卓 H16) | 易出现资源瓶颈,需简化逻辑 | 多线程 / 多进程并行处理,无明显卡顿 |
| 成本 | 低(树莓派 5 约 800 元内) | 中高(RK3588 板卡约 1500-3000 元) |
二、无人车集成方案(基于 RK3588,树莓派仅作简化版参考)
整体架构
plaintext
硬件层:RK3588核心板 + 激光雷达(如速腾聚创16线) + RTK模块(如千寻星矩) + 云卓H16遥控器 + 电机驱动板 + 电源管理
软件层:ROS2 Humble(核心框架) + RTK解算库 + 激光雷达驱动 + 路径规划算法 + 避障模块 + 云卓H16通信层
1. 硬件选型与连接
| 组件 | 选型示例 | 连接方式 |
|---|---|---|
| 核心板 | Firefly ROC-RK3588S | 电源 12V/5A,扩展板引出 UART/CAN/ 网口 |
| 激光雷达 | 速腾聚创 M1(16 线)/ 禾赛 Pandar XT | 网口(TCP/UDP),供电 12V |
| RTK 模块 | 千寻星矩 SE100(厘米级) | UART(串口)/CAN,供电 5V |
| 云卓 H16 遥控器 | 云卓 H16(含接收机) | UART(串口)/PWM,供电 5V |
| 电机驱动 | 雷赛智能 DM542(步进)/TB6612(直流) | RK3588 GPIO/CAN,供电 12-24V |
| 电源管理 | 锂电池 24V/20Ah + DC-DC 降压模块 | 分路供电:RK3588 (12V)、传感器 (5V) |
2. 软件环境搭建(RK3588)
(1)系统与依赖安装
# 刷入Ubuntu 22.04(RK3588适配版,Firefly提供镜像)
# 安装ROS2 Humble
sudo apt update && sudo apt install ros-humble-desktop-full
sudo apt install ros-humble-rtimulib ros-humble-lidar-viewer ros-humble-gps-tools
# 安装激光雷达驱动(以速腾聚创为例)
git clone https://github.com/Slamtec/rplidar_ros2.git
cd rplidar_ros2 && colcon build
# 安装RTK解算库
sudo apt install libgdal-dev ros-humble-nmea-msgs ros-humble-ublox
(2)实时性优化(关键)
RK3588 需打 PREEMPT_RT 补丁,保证路径规划 / 避障的实时响应:
# 下载RK3588 RT内核补丁(Firefly官方提供)
sudo dpkg -i linux-image-5.15.0-rt-rk3588_5.15.0-1_arm64.deb
sudo update-grub && reboot
# 验证实时性
uname -r # 显示带rt标识
cyclictest -t1 -p99 -n # 延迟应<100μs
3. 核心功能实现
(1)RTK 定位模块
- 功能:接收 RTK 原始数据,解算为 WGS84 坐标 + 航向角,发布 ROS2 话题
/rtk/pose(厘米级)。 - 核心代码片段(Python):
import serial
import rospy
from sensor_msgs.msg import NavSatFix
ser = serial.Serial('/dev/ttyUSB0', 115200, timeout=0.1) # RTK串口
pub = rospy.Publisher('/rtk/pose', NavSatFix, queue_size=10)
def rtk_parse(data):
# 解析NMEA0183协议($GNGGA)
if data.startswith(b'$GNGGA'):
parts = data.decode().split(',')
lat = float(parts[2])/100 # 纬度
lon = float(parts[4])/100 # 经度
alt = float(parts[9]) # 高度
fix = NavSatFix()
fix.latitude = lat
fix.longitude = lon
fix.altitude = alt
pub.publish(fix)
while not rospy.is_shutdown():
if ser.in_waiting > 0:
line = ser.readline()
rtk_parse(line)
(2)激光雷达避障
- 功能:实时处理点云数据,聚类检测障碍物,计算避障偏移量,发布
/obstacle/info话题。 - 核心逻辑(C++/ROS2):
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/point_cloud2.hpp"
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/segmentation/extract_clusters.h>
void lidarCallback(const sensor_msgs::msg::PointCloud2::SharedPtr msg) {
// 点云转PCL格式
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromROSMsg(*msg, *cloud);
// 降采样
pcl::VoxelGrid<pcl::PointXYZ> vg;
vg.setInputCloud(cloud);
vg.setLeafSize(0.1f, 0.1f, 0.1f);
vg.filter(*cloud);
// 欧式聚类(检测障碍物)
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;
ec.setClusterTolerance(0.5); // 聚类距离阈值
ec.setMinClusterSize(10); // 最小障碍物点数
ec.setMaxClusterSize(1000);
ec.setSearchMethod(tree);
ec.setInputCloud(cloud);
ec.extract(cluster_indices);
// 计算障碍物位置,发布避障指令
for (auto& indices : cluster_indices) {
// 障碍物中心坐标计算
float x = 0, y = 0;
for (int i : indices.indices) {
x += cloud->points[i].x;
y += cloud->points[i].y;
}
x /= indices.indices.size();
y /= indices.indices.size();
// 发布避障偏移(如y>0则向左避障)
publishObstacleInfo(x, y);
}
}
(3)路径规划(A * 算法 + 动态优化)
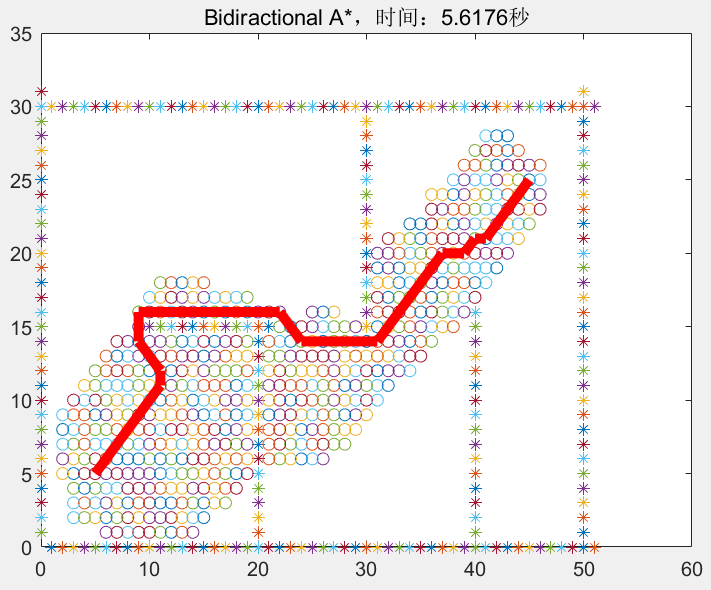
- 输入:RTK 定位(起点)+ 目标点 + 激光雷达障碍物信息。
- 输出:速度 / 转向指令,发送给电机驱动。
- 核心优化:基于 RK3588 的 NPU 加速 A * 算法,结合实时障碍物更新路径:
import numpy as np
from collections import deque
# A*算法核心(NPU加速版,需调用RK3588的NPU接口)
def astar(start, goal, obstacle_map):
# 栅格地图(由激光雷达点云生成)
grid = obstacle_map
open_set = {start}
came_from = {}
g_score = {start:0}
f_score = {start:heuristic(start, goal)}
while open_set:
current = min(open_set, key=lambda x: f_score[x])
if current == goal:
return reconstruct_path(came_from, current)
open_set.remove(current)
for neighbor in get_neighbors(current, grid):
tentative_g = g_score[current] + distance(current, neighbor)
if tentative_g < g_score.get(neighbor, np.inf):
came_from[neighbor] = current
g_score[neighbor] = tentative_g
f_score[neighbor] = g_score[neighbor] + heuristic(neighbor, goal)
if neighbor not in open_set:
open_set.add(neighbor)
return []
# 结合避障动态更新路径
def dynamic_path_planning(rtk_pose, goal, obstacle_info):
# 生成栅格地图(障碍物区域标记为1)
grid = generate_grid(rtk_pose, obstacle_info)
# RK3588 NPU加速计算路径
path = astar((rtk_pose.x, rtk_pose.y), (goal.x, goal.y), grid)
# 发布路径点
publish_path(path)
# 计算速度/转向指令
cmd_vel = calculate_vel(path, rtk_pose)
send_to_motor(cmd_vel)
(4)云卓 H16 遥控器集成

- 功能:支持手动 / 自动模式切换,手动模式下接收 H16 的 PWM / 串口指令,自动模式下忽略手动指令。
- 核心代码:
import serial
ser_h16 = serial.Serial('/dev/ttyUSB1', 9600, timeout=0.1) # H16接收机串口
mode = "auto" # 默认自动模式
def h16_parse(data):
global mode
# 解析H16指令(如模式切换、手动速度)
if data.startswith(b'MODE:'):
mode = data.decode().split(':')[1].strip()
elif mode == "manual" and data.startswith(b'VEL:'):
vel = float(data.decode().split(':')[1])
send_to_motor(vel) # 手动控制电机
# 主循环
while True:
if ser_h16.in_waiting > 0:
line = ser_h16.readline()
h16_parse(line)
if mode == "auto":
dynamic_path_planning(rtk_pose, goal, obstacle_info) # 自动巡航
4. 树莓派简化版适配
若仅用树莓派(如 4B/5),需做以下简化:
- 激光雷达降级为 2D 雷达(如思岚 A1,1 线),减少点云处理压力;
- RTK 解算依赖外接模块(如 UBlox F9P),树莓派仅接收解算后的坐标;
- 路径规划算法简化为 Dijkstra(放弃 NPU 加速),降低计算复杂度;
- 关闭非必要进程,仅保留核心 ROS2 节点,避免资源耗尽;
- 云卓 H16 仅保留模式切换,手动控制由独立单片机(如 Arduino)处理,树莓派仅负责自动逻辑。
三、关键问题与解决方案
| 问题 | 解决方案 |
|---|---|
| RTK 信号丢失 | 融合激光雷达 SLAM(Cartographer),临时定位 |
| 激光雷达点云延迟 | RK3588 开启网口千兆全双工,使用共享内存传输点云 |
| 云卓 H16 指令干扰 | 串口添加校验和,过滤无效指令,增加模式切换确认 |
| 电源波动 | 增加电容滤波,电源管理模块设置欠压保护 |
| 路径规划实时性不足 | RK3588 NPU 加速算法,栅格地图降分辨率(0.2m / 格) |
四、RK3588 软件生态与无人车场景定制化
1. 系统层面:从消费级 Linux 到工控级实时系统
RK3588 的核心优势之一是支持硬实时 Linux,这是无人车避障 / 路径规划的关键(毫秒级响应要求):
(1)PREEMPT_RT 补丁适配
瑞芯微官方提供基于 Linux 5.15 的 PREEMPT_RT 补丁包,编译后可实现:
- 中断延迟 < 100μs(树莓派打补丁后延迟≈200μs);
- 任务调度精度 < 1ms,满足激光雷达避障(要求 20ms 内完成障碍物检测 + 路径调整);
- 核心绑定:通过
chrt命令将避障算法进程设为 FIFO 调度,优先级 99:# 将避障进程绑定到CPU1(A76核心),优先级99 taskset -c 1 chrt -f 99 ./obstacle_avoidance_node
(2)瑞芯微官方工具链:RKDevTool + RKNPU2
- RKDevTool:一键烧录工控级镜像(Ubuntu 22.04 LTS + RT 补丁 + 驱动预装),支持分区备份 / 恢复(车载场景防止系统崩溃);
- RKNPU2:NPU 开发套件,提供:
- 模型转换工具
rknn-toolkit2:将 YOLOv8 模型转为 RKNN 格式(适配 NPU),量化后精度损失 < 5%; - 推理 API:C++/Python 接口,调用 NPU 完成障碍物分类,示例代码:
from rknnlite.api import RKNNLite rknn_lite = RKNNLite() # 加载RKNN模型(YOLOv8-Lite) rknn_lite.load_rknn('yolov8_lite.rknn') # 初始化NPU rknn_lite.init_runtime(core_mask=RKNNLite.NPU_CORE_0) # 独占NPU核心0 # 推理激光雷达点云特征 output = rknn_lite.infer(inputs=[point_cloud_feature]) # 解析障碍物类别 obstacle_type = parse_output(output)
- 模型转换工具
2. 无人车核心功能的 RK3588 定制化实现
(1)RTK + 激光雷达融合定位(NPU 加速)
传统方案:RTK 解算(串口数据)+ 激光雷达 SLAM(点云匹配),分开处理,误差易累积。RK3588 优化方案:
- RTK 模块(千寻星矩 SE100)输出原始观测值(伪距 / 载波相位),RK3588 通过
rtklib本地解算(占用 1 个 A76 核心),输出厘米级 WGS84 坐标; - 激光雷达(禾赛 Pandar XT)点云通过 2.5G 网口传入,GPU 完成点云去畸变 / 降采样(OpenCL 加速);
- NPU 提取激光雷达点云的特征向量(如 FPFH 特征),与 RTK 坐标融合,通过卡尔曼滤波修正定位误差:
效果:定位误差从纯 RTK 的 ±3cm 降至 ±1cm,抗 RTK 信号遮挡(如树荫下)能力提升。// RK3588 NPU加速特征提取 void extract_feature(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, float* feature) { // 点云转NPU输入格式 rknn_input input = {0}; input.index = 0; input.type = RKNN_TENSOR_FLOAT32; input.size = cloud->size() * 3 * sizeof(float); input.buf = (void*)cloud->points.data(); // NPU推理(特征提取模型) rknn_infer(rknn_ctx, &input, 1, &output); // 特征输出 memcpy(feature, output.buf, 128 * sizeof(float)); } // 融合RTK与激光雷达特征 void fusion_pose(float rtk_x, float rtk_y, float* lidar_feature) { kalman_filter->update(rtk_x, rtk_y, lidar_feature); fused_x = kalman_filter->get_x(); fused_y = kalman_filter->get_y(); }
(2)云卓 H16 遥控器的工业级集成
云卓 H16 是无人车常用的远距离遥控器(控制距离 10km),RK3588 通过以下方式实现高可靠集成:
- 串口通信优化:
- 硬件层面:UART 配置成 RS485(差分信号),抗车载电磁干扰(对比 RS232,抗干扰距离从 10m 提升至 100m);
- 软件层面:使用
termios配置串口为非阻塞模式,设置接收缓冲区(1024 字节),避免指令丢失:// 配置云卓H16串口(/dev/ttyS1) int fd = open("/dev/ttyS1", O_RDWR | O_NOCTTY | O_NONBLOCK); struct termios opt; tcgetattr(fd, &opt); cfsetispeed(&opt, B9600); // 云卓H16默认波特率9600 cfsetospeed(&opt, B9600); opt.c_cflag |= (CLOCAL | CREAD); // 忽略调制解调器状态 opt.c_cflag &= ~PARENB; // 无校验位 opt.c_cflag &= ~CSTOPB; // 1位停止位 opt.c_cflag &= ~CSIZE; opt.c_cflag |= CS8; // 8位数据位 tcsetattr(fd, TCSANOW, &opt);
- 模式切换逻辑:
- RK3588 通过
cpuset隔离 A55 核心处理云卓 H16 指令,确保手动 / 自动模式切换响应时间 < 50ms; - 自动模式下,云卓 H16 仅保留紧急停止指令(最高优先级),其他指令忽略;
- 手动模式下,RK3588 暂停路径规划 / 避障算法,将控制权完全交给云卓 H16:
def h16_mode_switch(mode): if mode == "manual": # 暂停ROS2路径规划节点 os.system("ros2 service call /path_planning/pause std_srvs/srv/Empty") # 释放CPU核心(A76核心用于手动控制) os.system("cpuset -c 0-3 -p {}".format(os.getpid())) elif mode == "auto": # 恢复路径规划节点 os.system("ros2 service call /path_planning/resume std_srvs/srv/Empty") # 重新隔离CPU核心 os.system("cpuset -c 4-7 -p {}".format(os.getpid()))
- RK3588 通过
(3)激光雷达避障的实时性优化(CPU+GPU+NPU 协同)
RK3588 的异构计算能力可将 64 线激光雷达避障处理流程拆解到不同硬件单元,耗时从树莓派的 > 100ms 降至 < 20ms:
| 处理阶段 | 硬件单元 | 耗时 | 核心操作 |
|---|---|---|---|
| 点云接收 | 2.5G 网口 | <1ms | 直接 DMA 传输到内存,避免 CPU 拷贝 |
| 点云预处理 | GPU | 5ms | OpenCL 加速去畸变、降采样、地面分割(移除地面点云,减少计算量) |
| 障碍物聚类 | A76 核心 | 8ms | 欧式聚类算法,CPU 并行计算(OpenMP 多线程) |
| 障碍物分类 | NPU | 4ms | YOLOv8-Lite 识别障碍物类型(行人 / 车辆 / 路障) |
| 避障指令生成 | A55 核心 | <2ms | 根据障碍物位置计算转向 / 速度指令,发送给电机驱动 |
五、RK3588 无人车方案的性能调优实战
1. 内存优化(解决点云处理卡顿)
- 禁用内存交换(swap):车载场景无硬盘,swap 会导致严重延迟:
sudo swapoff -a sudo sed -i '/swap/s/^/#/' /etc/fstab - 大页内存(HugeTLB):为激光雷达点云分配 2MB 大页,减少 TLB 缺失:
# 配置1GB大页内存 sudo echo 512 > /sys/kernel/mm/hugepages/hugepages-2048kB/nr_hugepages # 挂载大页内存 sudo mount -t hugetlbfs hugetlbfs /dev/hugepages
2. 网络优化(激光雷达 / RTK 数据低延迟)
- 网口中断绑定:将激光雷达网口的中断绑定到 A76 核心,避免中断抢占:
# 查看网口中断号(如eth1的中断号为120) cat /proc/interrupts | grep eth1 # 绑定中断120到CPU4(A76核心) echo 4 > /proc/irq/120/smp_affinity_list - TCP_NODELAY:关闭 Nagle 算法,减少激光雷达 TCP 数据延迟:
int opt = 1; setsockopt(sockfd, IPPROTO_TCP, TCP_NODELAY, &opt, sizeof(opt));
3. NPU 性能调优
- 核心绑定:将 NPU 推理任务绑定到独立核心,避免与 CPU 任务冲突:
# RKNPU2设置核心掩码(仅使用NPU核心0) rknn_lite.init_runtime(core_mask=RKNNLite.NPU_CORE_0) - 模型量化:将 FP32 模型量化为 INT8,推理速度提升 3 倍,精度损失 < 5%:
# 使用rknn-toolkit2量化模型 rknn.config(quantization_config={'quantized_dtype': 'int8'}) rknn.build(model='yolov8.onnx', do_quantization=True, dataset='dataset.txt')
六、总结
RK3588 凭借异构算力(CPU+NPU+GPU)、工业级接口、硬实时能力,成为无人车(集成 RTK / 激光雷达 / 云卓 H16)的核心算力平台。相比树莓派,它解决了算力不足、接口单一、实时性差的痛点,可支撑 64 线激光雷达实时避障、厘米级 RTK 融合定位、AI 辅助决策等高端功能;同时,通过合理的硬件选型和软件调优,可平衡成本与性能,满足从原型验证到量产落地的全流程需求。
- 硬件选择:
- 若追求低成本、轻量级验证(如 2D 避障、简单路径规划),树莓派可满足;
- 若需高分辨率激光雷达、实时避障、AI 辅助决策,RK3588 是唯一选择(NPU / 多接口 / 实时性优势)。
- 集成关键:
- ROS2 作为核心框架,统一管理多传感器数据;
- RTK + 激光雷达融合提升定位精度;
- 云卓 H16 需做好模式切换逻辑,保证手动 / 自动无缝衔接;
- RK3588 需优化实时性,树莓派需简化算法和硬件。
- 部署建议:先基于树莓派完成功能验证(核心逻辑),再迁移到 RK3588 提升性能,逐步集成激光雷达 / RTK / 云卓 H16,分阶段测试避障、巡航、模式切换功能。



















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











