




Learning to Segment 3D Point Clouds in 2D Image Space
本文介绍一篇cvpr2020里面关于点云部件分割的文章。
论文
代码
1. 问题
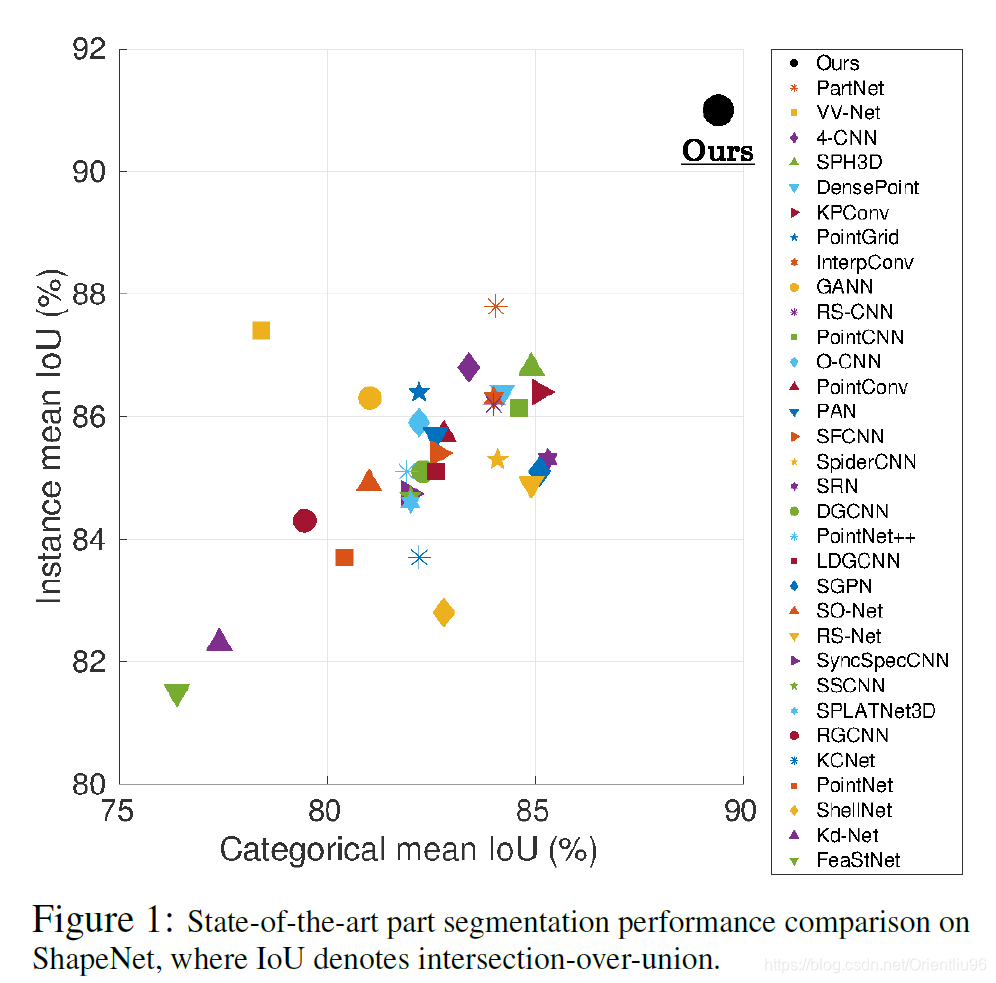
相比于2D U-net 的架构上,点云上的部件分割没有取得比较好的进展。
所以这篇文章,将3D点云投影到2D空间上,再使用U-net的架构进行分割,取得的效果可谓是遥遥领先!
2. 思想
整体流程就是以下三步
- Construct graphs from point clouds.
- Project graphs into images using graph drawing.
- Segment points using U-Net.
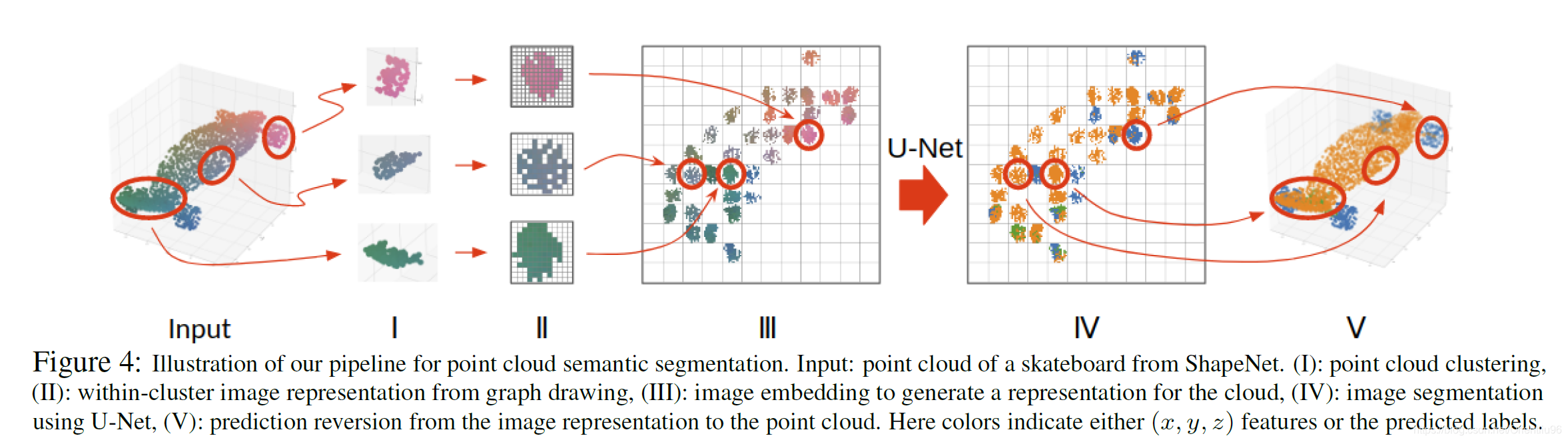
首先将2048个点,来源于shapent 或者partnet, 将其聚类成32个类别。 然后将这32个聚类中心映射到16x16规格的grid上。然后,对于属于一类的点,将他们再映射
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1512
1512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









