




FPConv: Learning Local Flattening for Point Convolution
本文介绍一篇cvpr2020里面关于点云识别的文章。
论文
代码
1. 问题
给出了一种平面化的卷积方式
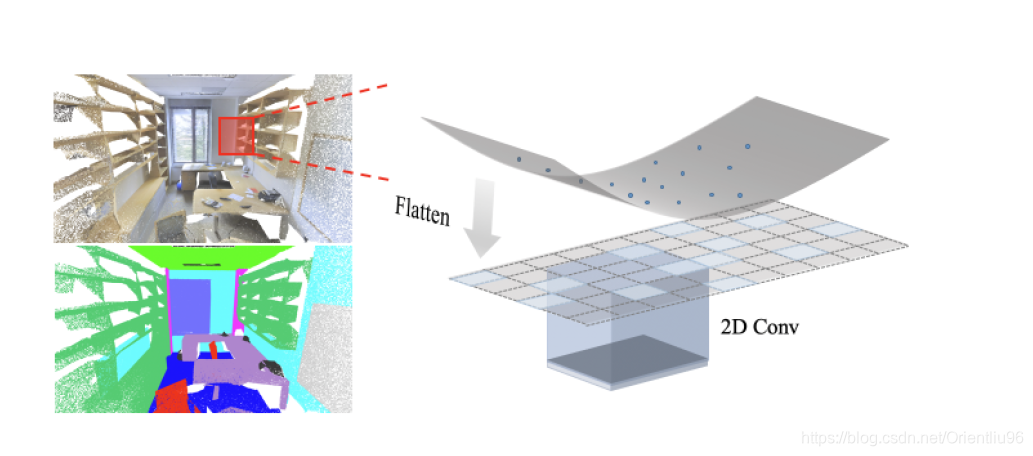
2. 思想
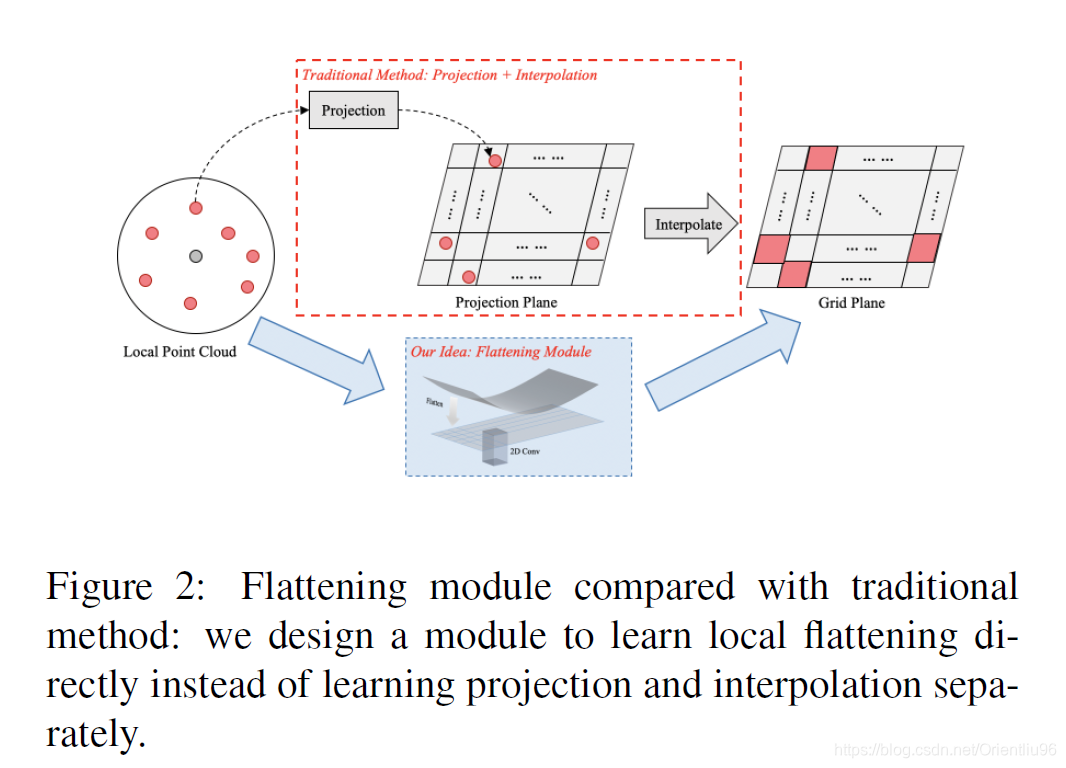
摒弃了先映射再卷积的两步骤处理方式,将两个过程合成一个过程。定义了FPConv 的平面卷积操作。
整个网络的架构如下

3. 算法
FPConv
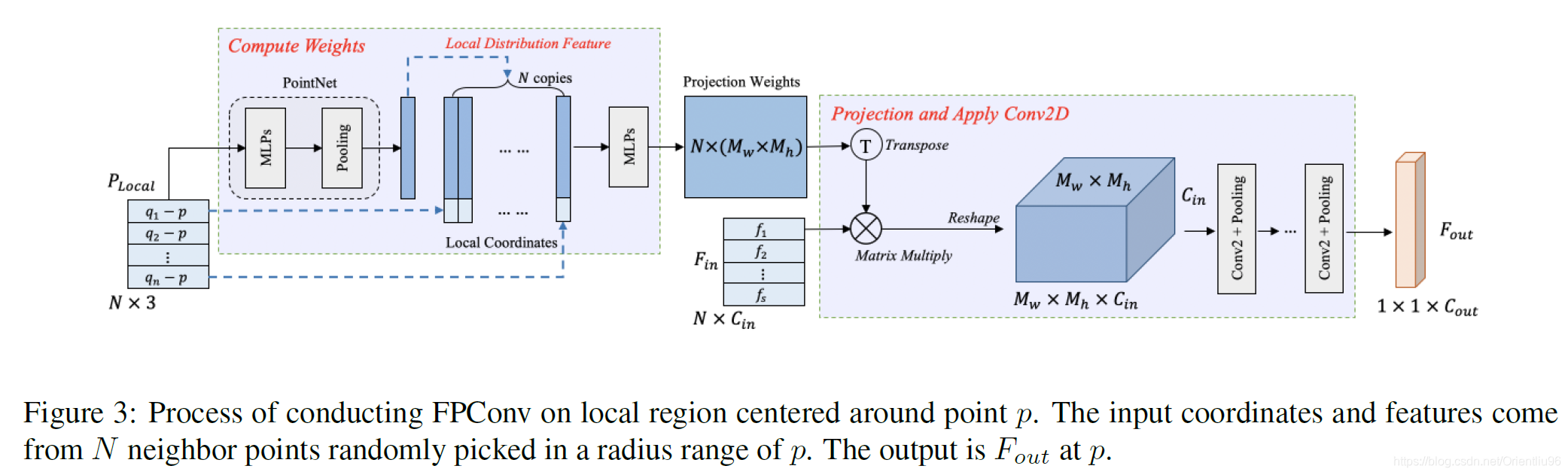
相当于将每个点及其邻域映射成了一个平面处理,贴下部分代码会更好理解。
# get distribution vector
grouped_xyz, grouped_feats = self.grouper(xyz, new_xyz, features) #grouped_xyz: B, 3, npoint, nsample
proj_wts = self.wts_layer(grouped_xyz) # B,ml,np,ns
if self.use_xyz:
grouped_feats = torch.cat([grouped_xyz, grouped_feats] 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1414
1414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









