




 Google旗下DeepMind发布了OpenX-Embodiment数据集,通过融合22种机器人类型的数据,显著提升RT-2的机器人技能。OpenDataLab整理并提供此数据集,促进了具身机器人研究。
Google旗下DeepMind发布了OpenX-Embodiment数据集,通过融合22种机器人类型的数据,显著提升RT-2的机器人技能。OpenDataLab整理并提供此数据集,促进了具身机器人研究。
近期,Google旗下的前沿人工智能企业DeepMind汇集了来自 22 种不同机器人类型的数据,创建了 Open X-Embodiment 数据集并开源了出来。该数据集让他们研发的RT-2 机器人在制造和编程方式上有了重大飞跃。
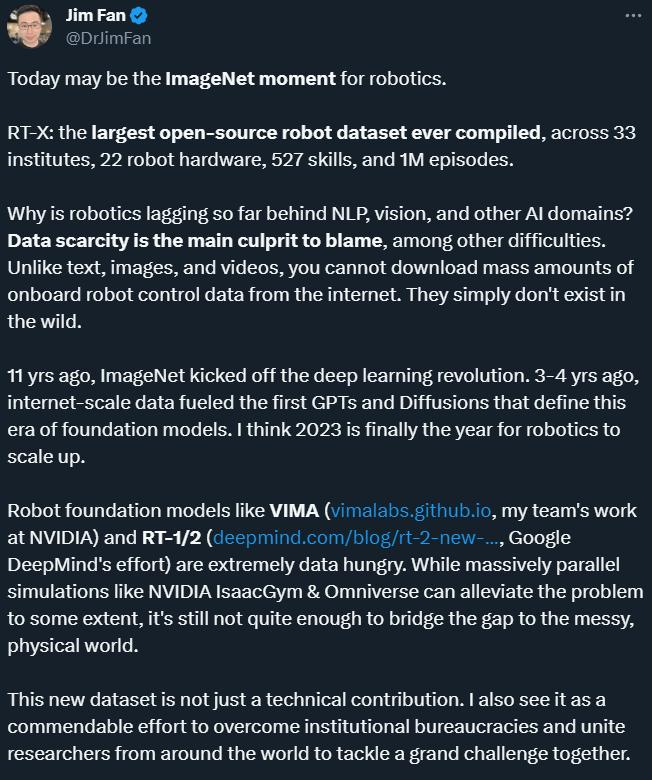
有分析称,在上述数据集上训练的 RT-2-X 在现实世界机器人技能上的表现提高了 2 倍,而且通过学习新数据RT-2-X 掌握了很多新技能。英伟达高级人工智能科学家Jim Fan甚至公开表示,这个数据集可能是机器人的ImageNet时刻。
谷歌开放了X-具身存储库(robotics-transformer-X.github.io)来存储Open X-Embodiment数据集。这是一个开源存储库,包括用于X-具身机器人学习研究的大规模数据以及预训练模型的检查点。
为助力具身机器人技术研究,提高数据准备效率,OpenDataLab(opendatalab.com)整理并上架了DeepMind公开的Open X-Embodiment数据集,欢迎大家下载与探索。
另外寻星计划正在火热进行中,上传原创数据集领好礼,点击参加→寻找最闪亮的 OpenDataLab 数据之星, We want you !
数据集概述
Open X-Embodiment子数据集信息列表:
https://docs.google.com/spreadsheets/d/1rPBD77tk60AEIGZrGSODwyyzs5FgCU9Uz3h-3_t2A9g/edit?pli=1#gid=0
关键词:
● 21个科研机构
● 22个机器人
● 60个已有数据集的融合
● 527个技能
● 160,266个任务
● 1,402,930条数据(共约3600G)
数据处理:
所有源数据集统一转化为RLDS格式。
对于源数据的不同格式和内容,做了以下处理:
1. 对于存在多视角的数据集,仅选择其中“canonical”的一个视角图像(猜测为比较接近top-down第一人称视角/Proprioception的那一个)。
2. 将图像resize到320×256(width×height)。
3. 将原有的动作(比如joint position)都转换为EE的动作,但是该动作量可能为相对值,也可能为绝对值。在模型输出action tokens∈ [0, 255]\in [0, 255]后根据不同的机器人做不同的de-normalization后再下达具体的控制指令。
数据集特征:
1. 60个数据集中涉及到的机器人有单臂、双臂和四足,Fra
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1301
1301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









